Previous publications

Eduardo B. Fernandez, Antonio Muñoz
A cluster of patterns for Trusted Computing Forthcoming
In: International Journal of Information Security, vol. XX, iss. XX, no. XX, pp. XX, Forthcoming.
@article{Fernandez25b,
title = {A cluster of patterns for Trusted Computing},
author = {Eduardo B. Fernandez and Antonio Mu\~{n}oz },
editor = {Guenther Pernul},
year = {2025},
date = {2025-12-12},
urldate = {2025-12-12},
journal = {International Journal of Information Security},
volume = {XX},
number = {XX},
issue = {XX},
pages = {XX},
abstract = {The proliferation of Internet of Things (IoT) and cyberphysical systems (CPSs) has introduced unprecedented challenges in ensuring the integrity and confidentiality of critical data, making robust security mechanisms essential. There are several mechanisms intended to assure trust with respect to the software loaded into the system and the trustworthiness of the boot process. These mechanisms start from a Root of Trust (RoT), from where all the other trusts, e.g., for components and software are derived. As part of the RoT, a Secure Storage is needed. This Secure Storage can be considered as part of the RoT or considered a separate component. After a RoT is established, a Trusted Boot can be performed. The execution of computational processes can then be supported by using separate execution zones (Zone Isolation). More complex trust functions such as remote attestation can be performed by a Trusted Platform Module (TPM) . In this paper, we propose security patterns for these components. The abstraction power of patterns can be used to define the basic aspects that each of these components must have, thus serving as reference for designers and for security evaluation.},
key = {Trusted systems, Security patterns, Root of Trust,Trusted processing},
keywords = {},
pubstate = {forthcoming},
tppubtype = {article}
}
Pablo Sanchez-Serrano, Ruben Rios, Isaac Agudo
A decision framework for privacy-preserving synthetic data generation
In: Computers and Electrical Engineering, vol. 126, pp. 110468, 2025, ISSN: 0045-7906.
@article{Sanchez-Serrano2025,
title = {A decision framework for privacy-preserving synthetic data generation},
author = {Pablo Sanchez-Serrano and Ruben Rios and Isaac Agudo},
url = {https://www.sciencedirect.com/science/article/pii/S0045790625004112},
doi = {10.1016/j.compeleceng.2025.110468},
issn = {0045-7906},
year = {2025},
date = {2025-06-13},
urldate = {2025-06-13},
journal = {Computers and Electrical Engineering},
volume = {126},
pages = {110468},
abstract = {Access to realistic data is essential for various purposes, including training machine learning models, conducting simulations, and supporting data-driven decision making across diverse domains. However, the use of real data often raises significant privacy concerns, as it may contain sensitive or personal information. Generative models have emerged as a promising solution to this problem by generating synthetic datasets that closely resemble real data. Nevertheless, these models are typically trained on original datasets, which carries the risk of leaking sensitive information. To mitigate this issue, privacy-preserving generative models have been developed to balance data utility and privacy guarantees. This paper examines existing generative models for synthetic tabular data generation, proposing a taxonomy of solutions based on the privacy guarantees they provide. Additionally, we present a decision framework to aid in selecting the most suitable privacy-preserving generative model for specific scenarios, using privacy and utility metrics as key selection criteria.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Daniel Morales, Isaac Agudo, Javier Lopez
A Lightweight Mechanism for Dynamic Secret Sharing of Private Data by Constrained Devices
In: IEEE Internet of Things Journal, 2025, ISSN: 2327-4662.
@article{morales2025iot,
title = {A Lightweight Mechanism for Dynamic Secret Sharing of Private Data by Constrained Devices},
author = {Daniel Morales and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/morales2025iot.pdf},
doi = {10.1109/JIOT.2025.3555026},
issn = {2327-4662},
year = {2025},
date = {2025-03-26},
urldate = {2025-03-26},
journal = {IEEE Internet of Things Journal},
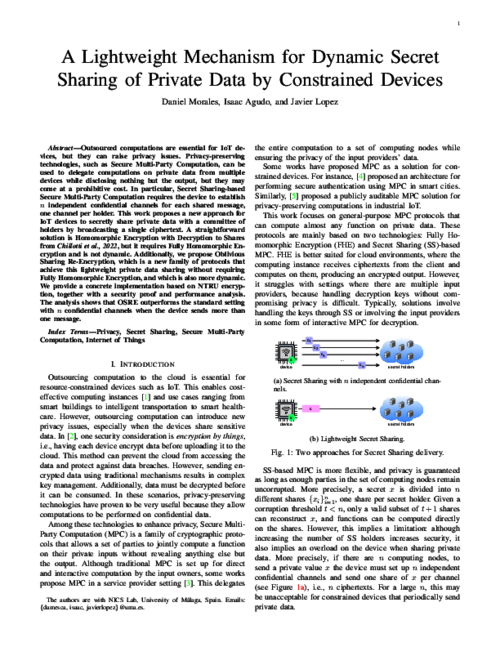
abstract = {Outsourced computations are essential for IoT devices, but they can raise privacy issues. Privacy-preserving technologies, such as Secure Multi-Party Computation, can be used to delegate computations on private data from multiple devices while disclosing nothing but the output, but they may come at a prohibitive cost. In particular, Secret Sharing-based Secure Multi-Party Computation requires the device to establish n independent confidential channels for each shared message, one channel per holder. This work proposes a new approach for IoT devices to secretly share private data with a committee of holders by broadcasting a single ciphertext. A straightforward solution is Homomorphic Encryption with Decryption to Shares from Chillotti et al., 2022, but it requires Fully Homomorphic Encryption and is not dynamic. Additionally, we propose Oblivious Sharing Re-Encryption, which is a new family of protocols that achieve this lightweight private data sharing without requiring Fully Homomorphic Encryption, and which is also more dynamic. We provide a concrete implementation based on NTRU encryption, together with a security proof and performance analysis. The analysis shows that OSRE outperforms the standard setting with n confidential channels when the device sends more than one message.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Davide Ferraris, Carmen Fernandez-Gago, Younes Assouyat, Houda Labiod, Wang Haiguang, Javier Lopez
Trust dynamicity for IoT: How do i trust your social IoT cluster?
In: Internet of Things, vol. 30, 2025.
@article{ferraris2025iot,
title = {Trust dynamicity for IoT: How do i trust your social IoT cluster?},
author = {Davide Ferraris and Carmen Fernandez-Gago and Younes Assouyat and Houda Labiod and Wang Haiguang and Javier Lopez},
editor = {Elsevier},
doi = {10.1016/j.iot.2025.101529},
year = {2025},
date = {2025-03-01},
urldate = {2025-03-01},
journal = {Internet of Things},
volume = {30},
abstract = {The Social IoT (SIoT) enhances the traditional Internet of Things (IoT) by integrating social relationships between device owners. This paper presents a dynamic trust framework specifically designed for SIoT environments, with the objective of providing security against malicious attacks targeting IoT devices. The framework offers a multi-dimensional analysis of trust, emphasizing the behaviours and contextual interactions of domestic devices. A prototype implementing the proposed framework is introduced and evaluated across three different use cases showing how to assess device reputation, enable dynamic device integration, and secure communication within device clusters. The evaluation results highlight the framework’s ability to enhance the reliability of device interactions and ensure seamless interoperability among devices utilizing different trust models. This significant improvement in trust management contributes to more secure and efficient SIoT operations. The findings underscore the critical role of dynamic trust adaptation and interoperability in creating a cohesive and secure SIoT ecosystem.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ruben Rios, Jose A. Montenegro, Antonio Muñoz, Davide Ferraris
Toward the Quantum-Safe Web: Benchmarking Post-Quantum TLS
In: IEEE Network, 2025, ISSN: 0890-8044.
@article{Rios2025,
title = {Toward the Quantum-Safe Web: Benchmarking Post-Quantum TLS},
author = {Ruben Rios and Jose A. Montenegro and Antonio Mu\~{n}oz and Davide Ferraris},
doi = {10.1109/MNET.2025.3531116},
issn = {0890-8044},
year = {2025},
date = {2025-01-17},
urldate = {2025-00-00},
journal = {IEEE Network},
abstract = {The transition to a quantum-resistant Internet is a complex process that depends on the integration of post-quantum cryptographic primitives into existing security protocols. This paper analyzes the impact that the primitives selected by NIST in their post-quantum cryptography competition has on a critical Internet security protocol, the TLS protocol. The analysis is facilitated by a framework that enables the implementation of an evaluation scenario in which different post-quantum primitives can be tested under identical conditions, ensuring a fair comparison. Our results indicate that the computational overhead introduced by current post-quantum standards in TLS is comparable to that of traditional algorithms, and even more efficient at high security levels. However, their significant impact on data transmission constrains the transition to a full-fledged quantum-safe web.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
Digital Twin Security: A Perspective on Efforts From Standardization Bodies
In: IEEE Security & Privacy, vol. 23, iss. 1, pp. 83-90, 2025, ISSN: 1558-4046.
@article{Alcaraz2025a,
title = {Digital Twin Security: A Perspective on Efforts From Standardization Bodies},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Alcaraz2025a.pdf
https://www.computer.org/csdl/magazine/sp/2025/01/10871233/2448764c2l2},
doi = {10.1109/MSEC.2024.3504193},
issn = {1558-4046},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {IEEE Security \& Privacy},
volume = {23},
issue = {1},
pages = {83-90},
abstract = {This article assesses the contributions of standardization bodies to digital twin (DT) protection and analyzes whether and how the organizations prioritize security. It identifies standardization work that better covers different security requirements, hence offering higher guarantees of DT protection.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Javier Lopez
Digital Twin-assisted anomaly detection for industrial scenarios
In: International Journal of Critical Infrastructure Protection, vol. 47, pp. 100721, 2024, ISSN: 1874-5482.
@article{Alcaraz2024c,
title = {Digital Twin-assisted anomaly detection for industrial scenarios},
author = {Cristina Alcaraz and Javier Lopez},
url = {https://www.sciencedirect.com/science/article/pii/S1874548224000623},
doi = {https://doi.org/10.1016/j.ijcip.2024.100721},
issn = {1874-5482},
year = {2024},
date = {2024-12-01},
urldate = {2024-12-01},
journal = {International Journal of Critical Infrastructure Protection},
volume = {47},
pages = {100721},
abstract = {Industry 5.0 is the current industrial paradigm that inherits the technological diversity of its predecessor, Industry 4.0, but includes three priority goals: (i) resilience, (ii) sustainability and (iii) human-centeredness. Through these three goals, Industry 5.0 pursues a more far-reaching digital transformation in industrial ecosystems with high protection guarantees. However, the deployment of innovative information technologies for this new digital transformation also requires considering their implicit vulnerabilities and threats in order to avoid any negative impacts on the three Industry 5.0 goals, and to prioritize cybersecurity aspects so as to ensure acceptable protection levels. This paper, therefore, proposes a detection framework composed of a Digital Twin (DT) and machine learning algorithms for online protection, supporting the resilience that Industry 5.0 seeks. To validate the approach, this work includes several practical studies on a real industrial control testbed to demonstrate the feasibility and accuracy of the framework, taking into account a set of malicious perturbations in several critical sections of the system. The results highlight the effectiveness of the DT in complementing the anomaly detection processes, especially for advanced and stealthy threats.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Iman Hasnaouia Meskini, Javier Lopez
Digital twin communities: an approach for secure DT data sharing
In: International Journal of Information Security, vol. 24, no. 17, 2024, ISSN: 1615-5270.
@article{AlcarazMeskiniLopez2024,
title = {Digital twin communities: an approach for secure DT data sharing},
author = {Cristina Alcaraz and Iman Hasnaouia Meskini and Javier Lopez},
url = {https://link.springer.com/article/10.1007/s10207-024-00912-1#citeas},
doi = {https://doi.org/10.1007/s10207-024-00912-1},
issn = {1615-5270},
year = {2024},
date = {2024-11-07},
urldate = {2024-11-07},
journal = {International Journal of Information Security},
volume = {24},
number = {17},
abstract = {Digital Twin (DT) technology empowers organizations to create virtual counterparts of their physical assets, thereby magnifying their analytical, optimization and decision-making capabilities. More specifically, the simulation capabilities of a DT generate high-quality data that not only benefit the DT owner organization, but also increase the potential of similar organizations by leveraging the DT’s capabilities when sharing its simulation results This collaborative sharing boosts the capabilities of each participating organization, fostering a collective intelligence that amplifies their competitive advantage. Nonetheless, data exchange must rigorously safeguard each organization’s data confidentiality, and access to this data must be thoroughly controlled. Thus, this paper introduces the novel concept of DT communities and proposes a hybrid access control architecture. This architecture seamlessly integrates the strengths of both Role Based Access Control (RBAC) and Organizational Based Access Control (OrBAC), facilitating secure, authorized intra- and inter-organizational information sharing in the context of Industry 5.0, combining the strengths of local DT communication and other organization’s DTs as well. Moreover, in order to show the feasibility of the approach for critical corporate organizations and their systems, in this paper we provide a proof-of-concept implementation of this architecture. To validate its functionality and efficiency, we perform a number of experimental studies showing how various entities can benefit from securely sharing DT models based on the concept of “community".},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Daniel Morales, Isaac Agudo, Javier Lopez
Toward a Framework for Cost-Effective and Publicly Verifiable Confidential Computations in Blockchain
In: IEEE Communications Magazine, 2024, ISSN: 1558-1896.
@article{morales2024commag,
title = {Toward a Framework for Cost-Effective and Publicly Verifiable Confidential Computations in Blockchain},
author = {Daniel Morales and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/morales2024commag.pdf},
doi = {10.1109/MCOM.001.2300839},
issn = {1558-1896},
year = {2024},
date = {2024-09-03},
urldate = {2024-09-03},
journal = {IEEE Communications Magazine},
abstract = {Blockchain technologies have introduced a compelling paradigm for a new understanding of security through decentralized networks and consensus mechanisms. However, they need all data to be public, which may be unacceptable for use cases such as biometric data processing or sensitive monetary transactions. Therefore, confidentiality is identified as a need in blockchain. Additionally, blockchain can contribute to confidential applications by providing publicly verifiable mechanisms, therefore enhancing security. This work presents a framework for cost-effective and publicly verifiable confidential computations in blockchain, by relying on secure multi-party computation committees and zero-knowledge proofs. Our framework supports arbitrary computations on confidential data enforced by smart contracts. Additionally, staking, incentives, and cheat identification are provided as solutions to enhance trust. We also provide a technical solution to embed secure multi-party computations within smart contracts by using the Promise programming pattern. Finally, a cost analysis is provided to justify the feasibility of the framework compared to other solutions.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Carmen Fernandez-Gago, Davide Ferraris, Rodrigo Roman, Javier Lopez
Trust interoperability in the Internet of Things
In: Internet of Things, vol. 26, 2024.
@article{FerIoT24,
title = {Trust interoperability in the Internet of Things},
author = {Carmen Fernandez-Gago and Davide Ferraris and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/FerIoT24.pdf},
doi = {https://doi.org/10.1016/j.iot.2024.101226},
year = {2024},
date = {2024-07-31},
urldate = {2024-07-31},
journal = {Internet of Things},
volume = {26},
abstract = {The Internet of Things (IoT) is a paradigm where entities or things are interconnected, often in heterogeneous contexts. As the interconnection happens, things establish collaborations with others, sometimes under uncertainty. Although trust can help us overcome this uncertainty, things might not be able to process the information about trust coming from other things: each thing could have its own trust model, which means its own way to understand and measure trust. If new trust relationships are to be established, it would be desirable to have a mechanism of interoperability that allows the things to process the information about the other things in terms of trust. In this paper, we describe an interoperability framework for tackling the trust interoperability issues in IoT, depending on the different types of trust models that might co-exist in the same IoT scenario.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Andrew D. Syrmakesis, Cristina Alcaraz, Nikos D. Hatziargyriou
DAR-LFC: A data-driven attack recovery mechanism for Load Frequency Control
In: International Journal of Critical Infrastructure Protection, vol. 45, iss. 100678, pp. 100678, 2024, ISSN: 1874-5482.
@article{SYRMAKESIS2024100678,
title = {DAR-LFC: A data-driven attack recovery mechanism for Load Frequency Control},
author = {Andrew D. Syrmakesis and Cristina Alcaraz and Nikos D. Hatziargyriou},
url = {https://www.sciencedirect.com/science/article/pii/S1874548224000192?dgcid=rss_sd_all},
doi = {https://doi.org/10.1016/j.ijcip.2024.100678},
issn = {1874-5482},
year = {2024},
date = {2024-07-01},
urldate = {2024-07-01},
journal = {International Journal of Critical Infrastructure Protection},
volume = {45},
issue = {100678},
pages = {100678},
abstract = {In power systems, generation must be maintained in constant equilibrium with consumption. A key indicator for this balance is the frequency of the power grid. The load frequency control (LFC) system is responsible for maintaining the frequency close to its nominal value and the power deviation of tie-lines at their scheduled levels. However, the remote communication system of LFC exposes it to several cyber threats. A successful cyberattack against LFC attempts to affect the field measurements that are transferred though its remote control loop. In this work, a data-driven, attack recovery method is proposed against denial of service and false data injection attacks, called DAR-LFC. For this purpose, a deep neural network is developed that generates estimations of the area control error (ACE) signal. When a cyberattack against the LFC occurs, the proposed estimator can temporarily compute and replace the affected ACE, mitigating the effects of the cyberattacks. The effectiveness and the scalability of the DAR-LFC is verified on a single and a two area LFC simulations in MATLAB/Simulink.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose A. Onieva, Pablo Pérez Jiménez, Javier Lopez
Malware similarity and a new fuzzy hash: Compound Code Block Hash (CCBHash)
In: Computers & Security, vol. 142, 2024, ISBN: 0167-4048.
BibTeX | Links:
@article{Onieva0000,
title = {Malware similarity and a new fuzzy hash: Compound Code Block Hash (CCBHash)},
author = {Jose A. Onieva and Pablo P\'{e}rez Jim\'{e}nez and Javier Lopez},
doi = {10.1016/j.cose.2024.103856},
isbn = {0167-4048},
year = {2024},
date = {2024-04-21},
urldate = {2024-04-21},
journal = {Computers \& Security},
volume = {142},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
Protecting Digital Twin Networks for 6G-enabled Industry 5.0 Ecosystems
In: IEEE Network Magazine, vol. 37, no. 2, pp. 302-308, 2023, ISSN: 0890-8044.
@article{Alcaraz2023a,
title = {Protecting Digital Twin Networks for 6G-enabled Industry 5.0 Ecosystems},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Alcaraz2023a.pdf
https://ieeexplore.ieee.org/abstract/document/10239369},
doi = {10.1109/MNET.004.2200529},
issn = {0890-8044},
year = {2023},
date = {2023-12-31},
urldate = {2023-12-31},
journal = {IEEE Network Magazine},
volume = {37},
number = {2},
pages = {302-308},
publisher = {IEEE},
abstract = {New industrial paradigms, such as the Industrial Internet of Things (IIoT) and Industry 5.0, are emerging in industrial contexts with the aim of fostering quality in operational processes. With the expected launch of 6G in the coming years, IIoT networks in Industry 5.0 ecosystems can leverage 6G technology and its support for training machine learning models using Digital Twins (DTs), embedded in DT Networks (DTNs), to transparently and continuously optimize their communications. Unfortunately, the use of these technologies, in turn, intensifies the attack surface and poses a serious threat to the new goals of Industry 5.0, such as improving the user experience, sustainability and resilience. This article therefore proposes a layered protection framework for 6G-enabled IIoT environments, where not only DTs and DTNs are fully protected, but also the whole 6G ecosystem, complying with the expected goals of Industry 5.0. To achieve this, the framework identifies for each protection layer a set of security and privacy services to subsequently relate them to existing computing infrastructures (cloud, edge, edge-cloud) and provide the best approach for future IIoT deployments.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Davide Ferraris, Carmen Fernandez-Gago, Rodrigo Roman, Javier Lopez
A Survey on IoT Trust Model Frameworks
In: The Journal of Supercomputing, vol. 80, pp. 8259–8296, 2023.
@article{surveyIoTrust2023,
title = {A Survey on IoT Trust Model Frameworks},
author = {Davide Ferraris and Carmen Fernandez-Gago and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/surveyIoTrust2023.pdf},
doi = {10.1007/s11227-023-05765-4},
year = {2023},
date = {2023-11-17},
urldate = {2023-11-17},
journal = {The Journal of Supercomputing},
volume = {80},
pages = {8259\textendash8296},
abstract = {Trust can be considered as a multidisciplinary concept, which is strongly related to the context and it falls in different fields such as Philosophy, Psychology or Computer Science. Trust is fundamental in every relationship, because without it, an entity will not interact with other entities. This aspect is very important especially in the Internet of Things (IoT), where many entities produced by different vendors and created for different purposes have to interact among them through the internet often under uncertainty. Trust can overcome this uncertainty, creating a strong basis to ease the process of interaction among these entities. We believe that considering trust in the IoT is fundamental, and in order to implement it in any IoT entity, it is fundamental to consider it through the whole System Development Life Cycle. In this paper, we propose an analysis of different works that consider trust for the IoT. We will focus especially on the analysis of frameworks that have been developed in order to include trust in the IoT. We will make a classification of them providing a set of parameters that we believe are fundamental in order to properly consider trust in the IoT. Thus, we will identify important aspects to be taken into consideration when developing frameworks that implement trust in the IoT, finding gaps and proposing possible solutions.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Jesus Cumplido, Alicia Triviño
OCPP in the spotlight: threats and countermeasures for electric vehicle charging infrastructures 4.0
In: International Journal of Information Security, 2023, ISSN: 1615-5262.
@article{Alcaraz2023b,
title = {OCPP in the spotlight: threats and countermeasures for electric vehicle charging infrastructures 4.0},
author = {Cristina Alcaraz and Jesus Cumplido and Alicia Trivi\~{n}o},
url = {/wp-content/papers/Alcaraz2023b.pdf
https://link.springer.com/article/10.1007/s10207-023-00698-8},
doi = {10.1007/s10207-023-00698-8},
issn = {1615-5262},
year = {2023},
date = {2023-05-05},
urldate = {2023-05-05},
journal = {International Journal of Information Security},
publisher = {Springer},
address = {Springer Verlag},
abstract = {Undoubtedly, Industry 4.0 in the energy sector improves the conditions for automation, generation and distribution of energy, increasing the rate of electric vehicle manufacturing in recent years. As a result, more grid-connected charging infrastructures are being installed, whose charging stations (CSs) can follow standardized architectures, such as the one proposed by the open charge point protocol (OCPP). The most recent version of this protocol is v.2.0.1, which includes new security measures at device and communication level to cover those security issues identified in previous versions. Therefore, this paper analyzes OCPP-v2.0.1 to determine whether the new functions may still be susceptible to specific cyber and physical threats, and especially when CSs may be connected to microgrids. To formalize the study, we first adapted the well-known threat analysis methodology, STRIDE, to identify and classify threats in terms of control and energy, and subsequently we combine it with DREAD for risk assessment. The analyses indicate that, although OCPP-v2.0.1 has evolved, potential security risks still remain, requiring greater protection in the future.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Daniel Morales, Isaac Agudo, Javier Lopez
Private set intersection: A systematic literature review
In: Computer Science Review, vol. 49, no. 100567, 2023, ISSN: 1574-0137.
@article{morales2023psi,
title = {Private set intersection: A systematic literature review},
author = {Daniel Morales and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/morales2023psi.pdf
https://www.sciencedirect.com/science/article/pii/S1574013723000345},
doi = {10.1016/j.cosrev.2023.100567},
issn = {1574-0137},
year = {2023},
date = {2023-05-01},
urldate = {2023-05-01},
journal = {Computer Science Review},
volume = {49},
number = {100567},
publisher = {Elsevier},
address = {ScienceDirect},
abstract = {Secure Multi-party Computation (SMPC) is a family of protocols which allow some parties to compute a function on their private inputs, obtaining the output at the end and nothing more. In this work, we focus on a particular SMPC problem named Private Set Intersection (PSI). The challenge in PSI is how two or more parties can compute the intersection of their private input sets, while the elements that are not in the intersection remain private. This problem has attracted the attention of many researchers because of its wide variety of applications, contributing to the proliferation of many different approaches. Despite that, current PSI protocols still require heavy cryptographic assumptions that may be unrealistic in some scenarios. In this paper, we perform a Systematic Literature Review of PSI solutions, with the objective of analyzing the main scenarios where PSI has been studied and giving the reader a general taxonomy of the problem together with a general understanding of the most common tools used to solve it. We also analyze the performance using different metrics, trying to determine if PSI is mature enough to be used in realistic scenarios, identifying the pros and cons of each protocol and the remaining open problems.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Rodrigo Roman, Cristina Alcaraz, Javier Lopez, Kouichi Sakurai
Current Perspectives on Securing Critical Infrastructures’ Supply Chains
In: IEEE Security & Privacy, vol. 21, no. 4, pp. 29-38, 2023, ISSN: 1540-7993.
BibTeX | Links:
@article{Roman2023a,
title = {Current Perspectives on Securing Critical Infrastructures’ Supply Chains},
author = {Rodrigo Roman and Cristina Alcaraz and Javier Lopez and Kouichi Sakurai},
url = {/wp-content/papers/Roman2023a.pdf},
doi = {10.1109/MSEC.2023.3247946},
issn = {1540-7993},
year = {2023},
date = {2023-03-08},
urldate = {2023-03-08},
journal = {IEEE Security \& Privacy},
volume = {21},
number = {4},
pages = {29-38},
publisher = {IEEE},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Antonio Muñoz, Ruben Rios, Rodrigo Roman, Javier Lopez
A survey on the (in)security of Trusted Execution Environments
In: Computers & Security, pp. 103-180, 2023, ISSN: 0167-4048.
@article{MUNOZ2023103180,
title = {A survey on the (in)security of Trusted Execution Environments},
author = {Antonio Mu\~{n}oz and Ruben Rios and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/MUNOZ2023103180.pdf
https://www.sciencedirect.com/science/article/pii/S0167404823000901},
doi = {10.1016/j.cose.2023.103180},
issn = {0167-4048},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Computers \& Security},
pages = {103-180},
publisher = {Elsevier},
address = {In Press},
abstract = {As the number of security and privacy attacks continue to grow around the world, there is an ever increasing need to protect our personal devices. As a matter of fact, more and more manufactures are relying on Trusted Execution Environments (TEEs) to shield their devices. In particular, ARM TrustZone (TZ) is being widely used in numerous embedded devices, especially smartphones, and this technology is the basis for secure solutions both in industry and academia. However, as shown in this paper, TEE is not bullet-proof and it has been successfully attacked numerous times and in very different ways. To raise awareness among potential stakeholders interested in this technology, this paper provides an extensive analysis and categorization of existing vulnerabilities in TEEs and highlights the design flaws that led to them. The presented vulnerabilities, which are not only extracted from existing literature but also from publicly available exploits and databases, are accompanied by some effective countermeasures to reduce the likelihood of new attacks. The paper ends with some appealing challenges and open issues.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Antonio Muñoz, Carmen Fernandez-Gago, Roberto Lopez-Villa
A Test Environment for Wireless Hacking in Domestic IoT Scenarios
In: Mobile Networks and Applications, 2022, ISSN: 1383-469X.
BibTeX | Links:
@article{munoz2022,
title = {A Test Environment for Wireless Hacking in Domestic IoT Scenarios},
author = {Antonio Mu\~{n}oz and Carmen Fernandez-Gago and Roberto Lopez-Villa},
url = {/wp-content/papers/munoz2022.pdf},
doi = {10.1007/s11036-022-02046-x},
issn = {1383-469X},
year = {2022},
date = {2022-10-01},
urldate = {2022-10-01},
journal = {Mobile Networks and Applications},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

George Suciu, Aristeidis Farao, Giorgio Bernardinetti, Ivan Palamá, Mari-Anais Sachian, Alexandru Vulpe, Marius-Constantin Vochin, Pavel Muresan, Michail Bampatsikos, Antonio Muñoz, Christos Xenakis
SAMGRID: Security Authorization and Monitoring Module Based on SealedGRID Platform
In: SENSORS, vol. 22, iss. 6527, no. 17, 2022, ISSN: 1424-8220.
@article{suciu2022samgrid,
title = {SAMGRID: Security Authorization and Monitoring Module Based on SealedGRID Platform},
author = {George Suciu and Aristeidis Farao and Giorgio Bernardinetti and Ivan Palam\'{a} and Mari-Anais Sachian and Alexandru Vulpe and Marius-Constantin Vochin and Pavel Muresan and Michail Bampatsikos and Antonio Mu\~{n}oz and Christos Xenakis},
url = {/wp-content/papers/suciu2022samgrid.pdf
https://www.mdpi.com/1424-8220/22/17/6527},
doi = {10.3390/s22176527},
issn = {1424-8220},
year = {2022},
date = {2022-08-30},
urldate = {2022-08-30},
journal = {SENSORS},
volume = {22},
number = {17},
issue = {6527},
abstract = {IoT devices present an ever-growing domain with multiple applicability. This technology has favored and still favors many areas by creating critical infrastructures that are as profitable as possible. This paper presents a hierarchical architecture composed of different licensing entities that manage access to different resources within a network infrastructure. They are conducted on the basis of well-drawn policy rules. At the same time, the security side of these resources is also placed through a context awareness module. Together with this technology, IoT is used and Blockchain is enabled (for network consolidation, as well as the transparency with which to monitor the platform). The ultimate goal is to implement a secure and scalable security platform for the Smart Grid. The paper presents the work undertaken in the SealedGRID project and the steps taken for implementing security policies specifically tailored to the Smart Grid, based on advanced concepts such as Opinion Dynamics and Smart Grid-related Attribute-based Access Control.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Andrew D. Syrmakesis, Cristina Alcaraz, Nikos D. Hatziargyriou
Classifying resilience approaches for protecting smart grids against cyber threats
In: International Journal of Information Security, vol. 21, pp. 1189–1210, 2022, ISSN: 1615-5262.
@article{Syrmakesis2022,
title = {Classifying resilience approaches for protecting smart grids against cyber threats},
author = {Andrew D. Syrmakesis and Cristina Alcaraz and Nikos D. Hatziargyriou},
url = {/wp-content/papers/Syrmakesis2022.pdf
https://link.springer.com/content/pdf/10.1007/s10207-022-00594-7.pdf},
doi = {https://doi.org/10.1007/s10207-022-00594-7},
issn = {1615-5262},
year = {2022},
date = {2022-05-01},
urldate = {2022-05-01},
journal = {International Journal of Information Security},
volume = {21},
pages = {1189\textendash1210},
publisher = {Springer},
address = {Springer Verlag},
abstract = {Smart grids (SG) draw the attention of cyber attackers due to their vulnerabilities, which are caused by the usage of heterogeneous communication technologies and their distributed nature. While preventing or detecting cyber attacks is a well-studied field of research, making SG more resilient against such threats is a challenging task. This paper provides a classification of the proposed cyber resilience methods against cyber attacks for SG. This classification includes a set of studies that propose cyber-resilient approaches to protect SG and related cyber-physical systems against unforeseen anomalies or deliberate attacks. Each study is briefly analyzed and is associated with the proper cyber resilience technique which is given by the National Institute of Standards and Technology in the Special Publication 800-160. These techniques are also linked to the different states of the typical resilience curve. Consequently, this paper highlights the most critical challenges for achieving cyber resilience, reveals significant cyber resilience aspects that have not been sufficiently considered yet and, finally, proposes scientific areas that should be further researched in order to enhance the cyber resilience of SG.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Xueou Wang, Xiaolu Hou, Ruben Rios, Nils Ole Tippenhauer, Martin Ochoa
Constrained Proximity Attacks on Mobile Targets
In: ACM Transactions on Privacy and Security (TOPS), vol. 25, no. 10, pp. 1 – 29, 2022, ISSN: 2471-2566.
@article{rios2022cpa,
title = {Constrained Proximity Attacks on Mobile Targets},
author = {Xueou Wang and Xiaolu Hou and Ruben Rios and Nils Ole Tippenhauer and Martin Ochoa},
url = {/wp-content/papers/rios2022cpa.pdf},
doi = {10.1145/3498543},
issn = {2471-2566},
year = {2022},
date = {2022-05-01},
urldate = {2022-05-01},
journal = {ACM Transactions on Privacy and Security (TOPS)},
volume = {25},
number = {10},
pages = {1 - 29},
publisher = {Association for Computer Machinery (ACM)},
abstract = {Proximity attacks allow an adversary to uncover the location of a victim by repeatedly issuing queries with fake location data. These attacks have been mostly studied in scenarios where victims remain static and there are no constraints that limit the actions of the attacker. In such a setting, it is not difficult for the attacker to locate a particular victim and quantifying the effort for doing so is straightforward. However, it is far more realistic to consider scenarios where potential victims present a particular mobility pattern. In this paper, we consider abstract (constrained and unconstrained) attacks on services that provide location information on other users in the proximity. We derive strategies for constrained and unconstrained attackers, and show that when unconstrained they can practically achieve success with theoretically optimal effort. We then propose a simple yet effective constraint that may be employed by a proximity service (for example, running in the cloud or using a suitable two-party protocol) as countermeasure to increase the effort for the attacker several orders of magnitude both in simulated and real-world cases.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Javier Lopez
Digital Twin: A Comprehensive Survey of Security Threats
In: IEEE Communications Surveys & Tutorials, vol. 24, no. thirdquarter 2022, pp. 1475 – 1503, 2022, ISSN: 1553-877X.
@article{Alcaraz2022b,
title = {Digital Twin: A Comprehensive Survey of Security Threats},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Alcaraz2022b.pdf
https://ieeexplore.ieee.org/document/9765576},
doi = {10.1109/COMST.2022.3171465},
issn = {1553-877X},
year = {2022},
date = {2022-04-01},
urldate = {2022-04-01},
journal = {IEEE Communications Surveys \& Tutorials},
volume = {24},
number = {thirdquarter 2022},
pages = {1475 - 1503},
publisher = {IEEE},
address = {IEEE},
abstract = {Industry 4.0 is having an increasingly positive impact on the value chain by modernizing and optimizing the production and distribution processes. In this streamline, the digital twin (DT) is one of the most cutting-edge technologies of Industry 4.0, providing simulation capabilities to forecast, optimize and estimate states and configurations. In turn, these technological capabilities are encouraging industrial stakeholders to invest in the new paradigm, though an increased focus on the risks involved is really needed. More precisely, the deployment of a DT is based on the composition of technologies such as cyber-physical systems, the Industrial Internet of Things, edge computing, virtualization infrastructures, artificial intelligence and big data. However, the confluence of all these technologies and the implicit interaction with the physical counterpart of the DT in the real world generate multiple security threats that have not yet been sufficiently studied. In that context, this paper analyzes the current state of the DT paradigm and classifies the potential threats associated with it, taking into consideration its functionality layers and the operational requirements in order to achieve a more complete and useful classification. We also provide a preliminary set of security recommendations and approaches that can help to ensure the appropriate and trustworthy use of a DT.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ishak Meraouche, Sabyasachi Dutta, Sraban Kumar Mohanty, Isaac Agudo, Kouichi Sakurai
Learning multi-party adversarial encryption and its application to secret sharing
In: IEEE Access, 2022, ISSN: 2169-3536.
@article{ishak22,
title = {Learning multi-party adversarial encryption and its application to secret sharing},
author = {Ishak Meraouche and Sabyasachi Dutta and Sraban Kumar Mohanty and Isaac Agudo and Kouichi Sakurai},
url = {/wp-content/papers/ishak22.pdf},
doi = {10.1109/ACCESS.2022.3223430},
issn = {2169-3536},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
journal = {IEEE Access},
publisher = {IEEE},
abstract = {Neural networks based cryptography has seen a significant growth since the introduction of adversarial cryptography which makes use of Generative Adversarial Networks (GANs) to build neural networks that can learn encryption. The encryption has been proven weak at first but many follow up works have shown that the neural networks can be made to learn the One Time Pad (OTP) and produce perfectly secure ciphertexts. To the best of our knowledge, existing works only considered communications between two or three parties. In this paper, we show how multiple neural networks in an adversarial setup can remotely synchronize and establish a perfectly secure communication in the presence of different attackers eavesdropping their communication. As an application, we show how to build Secret Sharing Scheme based on this perfectly secure multi-party communication. The results show that it takes around 45,000 training steps for 4 neural networks to synchronize and reach equilibria. When reaching equilibria, all the neural networks are able to communicate between each other and the attackers are not able to break the ciphertexts exchanged between them.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ruben Rios, Jose A. Onieva, Rodrigo Roman, Javier Lopez
Personal IoT Privacy Control at the Edge
In: IEEE Security & Privacy, vol. 20, pp. 23 – 32, 2022, ISSN: 1540-7993.
@article{rios2022pmec,
title = {Personal IoT Privacy Control at the Edge},
author = {Ruben Rios and Jose A. Onieva and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/rios2022pmec.pdf},
doi = {10.1109/MSEC.2021.3101865},
issn = {1540-7993},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
journal = {IEEE Security \& Privacy},
volume = {20},
pages = {23 - 32},
publisher = {IEEE},
abstract = {This article introduces a privacy manager for IoT data based on Edge Computing. This poses the advantage that privacy is enforced before data leaves the control of the user, who is provided with a tool to express data sharing preferences based on a novel context-aware privacy language.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Francesco Flammini, Cristina Alcaraz, Emanuele Bellini, Stefano Marrone, Javier Lopez, Andrea Bondavalli
Towards Trustworthy Autonomous Systems: Taxonomies and Future Perspectives
In: IEEE Transactions on Emerging Topics in Computing, 2022, ISSN: 2168-6750.
@article{Flamini2022,
title = {Towards Trustworthy Autonomous Systems: Taxonomies and Future Perspectives},
author = {Francesco Flammini and Cristina Alcaraz and Emanuele Bellini and Stefano Marrone and Javier Lopez and Andrea Bondavalli},
url = {/wp-content/papers/Flamini2022.pdf
https://ieeexplore.ieee.org/abstract/document/9979717/authors$#$authors},
doi = {10.1109/TETC.2022.3227113},
issn = {2168-6750},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
journal = {IEEE Transactions on Emerging Topics in Computing},
publisher = {IEEE},
abstract = {The class of Trustworthy Autonomous Systems (TAS) includes cyber-physical systems leveraging on self-x technologies that make them capable to learn, adapt to changes, and reason under uncertainties in possibly critical applications and evolving environments. In the last decade, there has been a growing interest in enabling artificial intelligence technologies, such as advanced machine learning, new threats, such as adversarial attacks, and certification challenges, due to the lack of sufficient explainability. However, in order to be trustworthy, those systems also need to be dependable, secure, and resilient according to well-established taxonomies, methodologies, and tools. Therefore, several aspects need to be addressed for TAS, ranging from proper taxonomic classification to the identification of research opportunities and challenges. Given such a context, in this paper address relevant taxonomies and research perspectives in the field of TAS. We start from basic definitions and move towards future perspectives, regulations, and emerging technologies supporting development and operation of TAS.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Simone Fischer-Hübner, Cristina Alcaraz, Afonso Ferreira, Carmen Fernandez-Gago, Javier Lopez, Evangelos Markatos, Lejla Islami, Mahdi Akil
Stakeholder Perspectives and Requirements on Cybersecurity in Europe
In: Journal of Information Security and Applications, vol. 61, no. 102916, 2021, ISSN: 2214-2126.
BibTeX | Links:
@article{Alcaraz2021a,
title = {Stakeholder Perspectives and Requirements on Cybersecurity in Europe},
author = {Simone Fischer-H\"{u}bner and Cristina Alcaraz and Afonso Ferreira and Carmen Fernandez-Gago and Javier Lopez and Evangelos Markatos and Lejla Islami and Mahdi Akil},
url = {/wp-content/papers/Alcaraz2021a.pdf
https://www.sciencedirect.com/science/article/pii/S2214212621001381},
doi = {10.1016/j.jisa.2021.102916},
issn = {2214-2126},
year = {2021},
date = {2021-09-01},
urldate = {2021-09-01},
journal = {Journal of Information Security and Applications},
volume = {61},
number = {102916},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Antonio Muñoz, Aristeidis Farao, Ryan Casas, Christos Xenakis
P2ISE: Preserving Project Integrity in CI/CD Based on Secure Elements
In: Information, vol. 12, no. 357, 2021, ISSN: 2078-2489,.
BibTeX | Links:
@article{anto2021,
title = {P2ISE: Preserving Project Integrity in CI/CD Based on Secure Elements},
author = {Antonio Mu\~{n}oz and Aristeidis Farao and Ryan Casas and Christos Xenakis},
url = {/wp-content/papers/anto2021.pdf},
issn = {2078-2489,},
year = {2021},
date = {2021-08-01},
urldate = {2021-08-01},
journal = {Information},
volume = {12},
number = {357},
publisher = {MDPI},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Isaac Agudo, Manuel Montenegro-Gómez, Javier Lopez
A Blockchain Approach for Decentralized V2X (D-V2X)
In: IEEE Transactions on Vehicular Technology, vol. 70, no. 5, pp. 4001 – 4010, 2021, ISSN: 0018-9545.
@article{Agudo2020,
title = {A Blockchain Approach for Decentralized V2X (D-V2X)},
author = {Isaac Agudo and Manuel Montenegro-G\'{o}mez and Javier Lopez},
url = {/wp-content/papers/Agudo2020.pdf},
doi = {10.1109/TVT.2020.3046640},
issn = {0018-9545},
year = {2021},
date = {2021-05-01},
urldate = {2021-05-01},
journal = {IEEE Transactions on Vehicular Technology},
volume = {70},
number = {5},
pages = {4001 - 4010},
publisher = {IEEE},
abstract = {New mobility paradigms have appeared in recent years, and everything suggests that some more are coming. This fact makes apparent the necessity of modernizing the road infrastructure, the signalling elements and the traffic management systems. Many initiatives have emerged around the term Intelligent Transport System (ITS) in order to define new scenarios and requirements for this kind of applications. We even have two main competing technologies for implementing Vehicular communication protocols (V2X), C-V2X and 802.11p, but neither of them is widely deployed yet.
One of the main barriers for the massive adoption of those technologies is governance. Current solutions rely on the use of a public key infrastructure that enables secure collaboration between the different entities in the V2X ecosystem, but given its global scope, managing such infrastructure requires reaching agreements between many parties, with conflicts of interest between automakers and telecommunication operators. As a result, there are plenty of use cases available and two mature communication technologies, but the complexity at the business layer is stopping the drivers from taking advantage of ITS applications.
Blockchain technologies are defining a new decentralized paradigm for most traditional applications, where smart contracts provide a straightforward mechanism for decentralized governance. In this work, we propose an approach for decentralized V2X (D-V2X) that does not require any trusted authority and can be implemented on top of any communication protocol. We also define a proof-of-concept technical architecture on top of a cheap and highly secure System-on-Chip (SoC) that could allow for massive adoption of D-V2X.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
One of the main barriers for the massive adoption of those technologies is governance. Current solutions rely on the use of a public key infrastructure that enables secure collaboration between the different entities in the V2X ecosystem, but given its global scope, managing such infrastructure requires reaching agreements between many parties, with conflicts of interest between automakers and telecommunication operators. As a result, there are plenty of use cases available and two mature communication technologies, but the complexity at the business layer is stopping the drivers from taking advantage of ITS applications.
Blockchain technologies are defining a new decentralized paradigm for most traditional applications, where smart contracts provide a straightforward mechanism for decentralized governance. In this work, we propose an approach for decentralized V2X (D-V2X) that does not require any trusted authority and can be implemented on top of any communication protocol. We also define a proof-of-concept technical architecture on top of a cheap and highly secure System-on-Chip (SoC) that could allow for massive adoption of D-V2X.

Javier Lopez, Juan E. Rubio, Cristina Alcaraz
Digital Twins for Intelligent Authorization in the B5G-enabled Smart Grid
In: IEEE Wireless Communications, vol. 28, pp. 48-55, 2021, ISSN: 1536-1284.
@article{lopez2020,
title = {Digital Twins for Intelligent Authorization in the B5G-enabled Smart Grid},
author = {Javier Lopez and Juan E. Rubio and Cristina Alcaraz},
url = {/wp-content/papers/lopez2020.pdf
https://ieeexplore.ieee.org/document/9430900},
doi = {10.1109/MWC.001.2000336},
issn = {1536-1284},
year = {2021},
date = {2021-04-01},
urldate = {2021-04-01},
journal = {IEEE Wireless Communications},
volume = {28},
pages = {48-55},
publisher = {IEEE},
abstract = {Beyond fifth generation (B5G) communication networks and computation paradigms in the edge are expected to be integrated into power grid infrastructures over the coming years. In this sense, AI technologies will play a fundamental role to efficiently manage dynamic information flows of future applications, which impacts the authorization policies applied in such a complex scenario. This article studies how digital twins can evolve their context awareness capabilities and simulation technologies to anticipate faults or to detect cyber-security issues in real time, and update access control policies accordingly. Our study analyzes the evolution of monitoring platforms and architecture decentralization, including the application of machine learning and blockchain technologies in the smart grid, toward the goal of implementing autonomous and self-learning agents in the medium and long term. We conclude this study with future challenges on applying digital twins to B5G-based smart grid deployments.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Davide Ferraris, Carmen Fernandez-Gago, Javier Lopez
A model-driven approach to ensure trust in the IoT
In: Human-centric Computing and Information Sciences, vol. 10, no. 50, 2020, ISSN: 2192-1962.
@article{ferraris2020b,
title = {A model-driven approach to ensure trust in the IoT},
author = {Davide Ferraris and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/ferraris2020b.pdf},
doi = {10.1186/s13673-020-00257-3},
issn = {2192-1962},
year = {2020},
date = {2020-12-01},
urldate = {2020-12-01},
journal = {Human-centric Computing and Information Sciences},
volume = {10},
number = {50},
publisher = {Springer},
abstract = {The Internet of Things (IoT) is a paradigm that permits smart entities to be interconnected anywhere and anyhow. IoT opens new opportunities but also rises new issues.
In this dynamic environment, trust is useful to mitigate these issues. In fact, it is important that the smart entities could know and trust the other smart entities in order to collaborate with them.
So far, there is a lack of research when considering trust through the whole System Development Life Cycle (SDLC) of a smart IoT entity.
In this paper, we suggest a new approach that considers trust not only at the end of the SDLC but also at the start of it. More precisely, we explore the modeling phase proposing a model-driven approach extending UML and SysML considering trust and its related domains, such as security and privacy.
We propose stereotypes for each diagram in order to give developers a way to represent trust elements in an effective way.
Moreover, we propose two new diagrams that are very important for the IoT: a traceability diagram and a context diagram.
This model-driven approach will help developers to model the smart IoT entities according to the requirements elicited in the previous phases of the SDLC.
These models will be a fundamental input for the following and final phases of the SDLC.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
In this dynamic environment, trust is useful to mitigate these issues. In fact, it is important that the smart entities could know and trust the other smart entities in order to collaborate with them.
So far, there is a lack of research when considering trust through the whole System Development Life Cycle (SDLC) of a smart IoT entity.
In this paper, we suggest a new approach that considers trust not only at the end of the SDLC but also at the start of it. More precisely, we explore the modeling phase proposing a model-driven approach extending UML and SysML considering trust and its related domains, such as security and privacy.
We propose stereotypes for each diagram in order to give developers a way to represent trust elements in an effective way.
Moreover, we propose two new diagrams that are very important for the IoT: a traceability diagram and a context diagram.
This model-driven approach will help developers to model the smart IoT entities according to the requirements elicited in the previous phases of the SDLC.
These models will be a fundamental input for the following and final phases of the SDLC.

Juan E. Rubio, Rodrigo Roman, Javier Lopez
Integration of a Threat Traceability Solution in the Industrial Internet of Things
In: IEEE Transactions on Industrial Informatics, vol. 16, no. 6575-6583, 2020, ISSN: 1551-3203.
@article{Rubio2020IIoT,
title = {Integration of a Threat Traceability Solution in the Industrial Internet of Things},
author = {Juan E. Rubio and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Rubio2020IIoT.pdf},
doi = {10.1109/TII.2020.2976747},
issn = {1551-3203},
year = {2020},
date = {2020-10-01},
urldate = {2020-10-01},
journal = {IEEE Transactions on Industrial Informatics},
volume = {16},
number = {6575-6583},
publisher = {IEEE},
abstract = {In Industrial Internet of Things (IIoT) scenarios, where a plethora of IoT technologies coexist with consolidated industrial infrastructures, the integration of security mechanisms that provide protection against cyber-security attacks becomes a critical challenge. Due to the stealthy and persistent nature of some of these attacks, such as Advanced Persistent Threats, it is crucial to go beyond traditional Intrusion Detection Systems for the traceability of these attacks. In this sense, Opinion Dynamics poses a novel approach for the correlation of anomalies, which has been successfully applied to other network security domains. In this paper, we aim to analyze its applicability in the IIoT from a technical point of view, by studying its deployment over different IIoT architectures and defining a common framework for the acquisition of data considering the computational constraints involved. The result is a beneficial insight that demonstrates the feasibility of this approach when applied to upcoming IIoT infrastructures.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto
Becoming JUDAS: Correlating Users and Devices during a Digital Investigation
In: IEEE Transactions on Information Forensics & Security, vol. 15, pp. 3325-3334, 2020, ISSN: 1556-6013.
@article{JUDAS2020,
title = {Becoming JUDAS: Correlating Users and Devices during a Digital Investigation},
author = {Ana Nieto},
url = {/wp-content/papers/JUDAS2020.pdf
https://ieeexplore.ieee.org/document/9069950},
doi = {10.1109/TIFS.2020.2988602},
issn = {1556-6013},
year = {2020},
date = {2020-07-01},
urldate = {2020-07-01},
journal = {IEEE Transactions on Information Forensics \& Security},
volume = {15},
pages = {3325-3334},
publisher = {IEEE},
abstract = {One of the biggest challenges in IoT-forensics is the analysis and correlation of heterogeneous digital evidence, to enable an effective understanding of complex scenarios. This paper defines a methodology for extracting unique objects (e.g., representing users or devices) from the files of a case, defining the context of the digital investigation and increasing the knowledge progressively, using additional files from the case (e.g. network captures). The solution includes external searches using emphopen source intelligence (OSINT) sources when needed. In order to illustrate this approach, the proposed methodology is implemented in the emphJSON Users and Devices analysis (JUDAS) tool, which is able to generate the context from JSON files, complete it, and show the whole context using dynamic graphs. The approach is validated using the files in an IoT-Forensic digital investigation where an important set of potential digital evidence extracted from Amazon’s Alexa Cloud is analysed.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Juan E. Rubio, Javier Lopez
Blockchain-Assisted Access for Federated Smart Grid Domains: Coupling and Features
In: Journal of Parallel and Distributed Computing, vol. 144, pp. 124-135, 2020, ISSN: 0743-7315.
BibTeX | Links:
@article{Alcaraz2020a,
title = {Blockchain-Assisted Access for Federated Smart Grid Domains: Coupling and Features},
author = {Cristina Alcaraz and Juan E. Rubio and Javier Lopez},
url = {/wp-content/papers/Alcaraz2020a.pdf},
issn = {0743-7315},
year = {2020},
date = {2020-06-01},
urldate = {2020-06-01},
journal = {Journal of Parallel and Distributed Computing},
volume = {144},
pages = {124-135},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Davide Ferraris, Daniel Bastos, Carmen Fernandez-Gago, Fadi El-Moussa
A Trust Model for Popular Smart Home Devices
In: International Journal of Information Security, 2020, ISSN: 1615-5262.
@article{ferraris2020,
title = {A Trust Model for Popular Smart Home Devices},
author = {Davide Ferraris and Daniel Bastos and Carmen Fernandez-Gago and Fadi El-Moussa},
url = {/wp-content/papers/ferraris2020.pdf
https://link.springer.com/article/10.1007/s10207-020-00519-2},
doi = {10.1007/s10207-020-00519-2},
issn = {1615-5262},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {International Journal of Information Security},
publisher = {Springer},
abstract = {Nowadays, smart home devices like Amazon Echo and Google Home have reached mainstream popularity.
Being in the homes of users, these devices are intrinsically intrusive, being able to access details such as users’ name, gender, home address, calendar appointments and others.
There are growing concerns about indiscriminate data collection and invasion of user privacy in smart home devices, but studies show that perceived benefits are exceeding perceived risks when it comes to consumers.
As a result, consumers are placing a lot of trust in these devices, sometimes without realizing it.
Improper trust assumptions and security controls can lead to unauthorized access and control of the devices, which can result in serious consequences.
In this paper, we explore the behaviour of devices such as Amazon Echo and Google Home in a smart home setting with respect to trust relationships and propose a trust model to improve these relationships among all the involved actors.
We have evaluated how trust was built and managed from the initial set up phase to the normal operation phase, during which we performed a number of interaction tests with different types of users (i.e. owner, guests).
As a result, we were able to assess the effectiveness of the provided security controls and identify potential relevant security issues. In order to address the identified issues, we defined a trust model and propose a solution based on it for further securing smart home systems.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Being in the homes of users, these devices are intrinsically intrusive, being able to access details such as users’ name, gender, home address, calendar appointments and others.
There are growing concerns about indiscriminate data collection and invasion of user privacy in smart home devices, but studies show that perceived benefits are exceeding perceived risks when it comes to consumers.
As a result, consumers are placing a lot of trust in these devices, sometimes without realizing it.
Improper trust assumptions and security controls can lead to unauthorized access and control of the devices, which can result in serious consequences.
In this paper, we explore the behaviour of devices such as Amazon Echo and Google Home in a smart home setting with respect to trust relationships and propose a trust model to improve these relationships among all the involved actors.
We have evaluated how trust was built and managed from the initial set up phase to the normal operation phase, during which we performed a number of interaction tests with different types of users (i.e. owner, guests).
As a result, we were able to assess the effectiveness of the provided security controls and identify potential relevant security issues. In order to address the identified issues, we defined a trust model and propose a solution based on it for further securing smart home systems.
Cristina Alcaraz, Giuseppe Bernieri, Federica Pascucci, Javier Lopez, Roberto Setola
Covert Channels-based Stealth Attacks in Industry 4.0
In: IEEE Systems Journal., vol. 13, pp. 3980-3988, 2019, ISSN: 1932-8184.
@article{alcaraz2019a,
title = {Covert Channels-based Stealth Attacks in Industry 4.0},
author = {Cristina Alcaraz and Giuseppe Bernieri and Federica Pascucci and Javier Lopez and Roberto Setola},
url = {/wp-content/papers/alcaraz2019a.pdf
https://ieeexplore.ieee.org/document/8715420?source=authoralert},
doi = {10.1109/JSYST.2019.2912308},
issn = {1932-8184},
year = {2019},
date = {2019-12-01},
urldate = {2019-12-01},
journal = {IEEE Systems Journal.},
volume = {13},
pages = {3980-3988},
publisher = {IEEE},
abstract = {Industry 4.0 advent opens several cyber-threats scenarios originally designed for classic information technology, drawing the attention to the serious risks for the modern industrial control networks. To cope with this problem, in this paper we address the security issues related to covert channels applied to industrial networks, identifying the new vulnerability points when information technologies converge with operational technologies such as edge computing infrastructures. Specifically, we define two signaling strategies where we exploit the Modbus/TCP protocol as target to set up a covert channel. Once the threat channel is established, passive and active offensive attacks (i.e. data exfiltration and command an control, respectively) are further exploited by implementing and testing them on a real Industrial Internet of Things testbed. The experimental results highlight the potential damage of such specific threats, and the easy extrapolation of the attacks to other types of channels in order to show the new risks for Industry 4.0. Related to this, we discuss some countermeasures to offer an overview of possible mitigation and defense measures.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Juan E. Rubio, Cristina Alcaraz, Rodrigo Roman, Javier Lopez
Current Cyber-Defense Trends in Industrial Control Systems
In: Computers & Security Journal, vol. 87, 2019, ISSN: 0167-4048.
@article{rub2019cose,
title = {Current Cyber-Defense Trends in Industrial Control Systems},
author = {Juan E. Rubio and Cristina Alcaraz and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/rub2019cose.pdf},
doi = {10.1016/j.cose.2019.06.015},
issn = {0167-4048},
year = {2019},
date = {2019-11-01},
urldate = {2019-11-01},
journal = {Computers \& Security Journal},
volume = {87},
publisher = {Elsevier},
abstract = {Advanced Persistent Threats (APTs) have become a serious hazard for any critical infrastructure, as a single solution to protect all industrial assets from these complex attacks does not exist. It is then essential to understand what are the defense mechanisms that can be used as a first line of defense. For this purpose, this article will firstly study the spectrum of attack vectors that APTs can use against existing and novel elements of an industrial ecosystem. Afterwards, this article will provide an analysis of the evolution and applicability of Intrusion Detection Systems (IDS) that have been proposed in both the industry and academia.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose A. Onieva, Ruben Rios, Rodrigo Roman, Javier Lopez
Edge-Assisted Vehicular Networks Security
In: IEEE Internet of Things Journal, vol. 6, pp. 8038-8045, 2019, ISSN: 2327-4662.
@article{onieva2019vec,
title = {Edge-Assisted Vehicular Networks Security},
author = {Jose A. Onieva and Ruben Rios and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/onieva2019vec.pdf},
doi = {10.1109/JIOT.2019.2904323},
issn = {2327-4662},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {IEEE Internet of Things Journal},
volume = {6},
pages = {8038-8045},
publisher = {IEEE Computer Society},
abstract = {Edge Computing paradigms are expected to solve some major problems affecting current application scenarios that rely on Cloud computing resources to operate. These novel paradigms will bring computational resources closer to the users and by doing so they will not only reduce network latency and bandwidth utilization but will also introduce some attractive context-awareness features to these systems. In this paper we show how the enticing features introduced by Edge Computing paradigms can be exploited to improve security and privacy in the critical scenario of vehicular networks (VN), especially existing authentication and revocation issues. In particular, we analyze the security challenges in VN and describe three deployment models for vehicular edge computing, which refrain from using vehicular- to-vehicular communications. The result is that the burden imposed to vehicles is considerably reduced without sacrificing the security or functional features expected in vehicular scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

David Nuñez, Isaac Agudo, Javier Lopez
Escrowed decryption protocols for lawful interception of encrypted data
In: IET Information Security, vol. 13, pp. 498 – 507, 2019, ISSN: 1751-8709.
@article{nunez19,
title = {Escrowed decryption protocols for lawful interception of encrypted data},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez19.pdf},
doi = {10.1049/iet-ifs.2018.5082},
issn = {1751-8709},
year = {2019},
date = {2019-09-01},
urldate = {2019-09-01},
journal = {IET Information Security},
volume = {13},
pages = {498 \textendash 507},
publisher = {IET},
abstract = {Escrowed decryption schemes (EDSs) are public-key encryption schemes with an escrowed decryption functionality that allows authorities to decrypt encrypted messages under investigation, following a protocol that involves a set of trusted entities called ‘custodians’; only if custodians collaborate, the requesting authority is capable of decrypting encrypted data. This type of cryptosystem represents an interesting trade-off to privacy versus surveillance dichotomy. In this study, the authors propose two EDSs where they use proxy re-encryption to build the escrowed decryption capability, so that custodians re-encrypt ciphertexts, in a distributed way, upon request from an escrow authority, and the re-encrypted ciphertexts can be opened only by the escrow authority. Their first scheme, called EDS, follows an all-or-nothing approach, which means that escrow decryption only works when all custodians collaborate. Their second scheme, called threshold EDS, supports a threshold number of custodians for the escrow decryption operation. They propose definitions of semantic security with respect to the authorities, custodians and external entities, and prove the security of their schemes, under standard pairing-based hardness assumptions. Finally, they present a theoretical and experimental analysis of the performance of both schemes, which show that they are applicable to real-world scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Juan E. Rubio, Rodrigo Roman, Cristina Alcaraz, Yan Zhang
Tracking APTs in Industrial Ecosystems: A Proof of Concept
In: Journal of Computer Security, vol. 27, pp. 521-546, 2019, ISSN: 0167-4048.
BibTeX | Links:
@article{RubioSIJCS19,
title = {Tracking APTs in Industrial Ecosystems: A Proof of Concept},
author = {Juan E. Rubio and Rodrigo Roman and Cristina Alcaraz and Yan Zhang},
url = {/wp-content/papers/RubioSIJCS19.pdf},
issn = {0167-4048},
year = {2019},
date = {2019-09-01},
urldate = {2019-09-01},
journal = {Journal of Computer Security},
volume = {27},
pages = {521-546},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Ruben Rios, Jose A. Onieva, Javier Lopez
Immune System for the Internet of Things using Edge Technologies
In: IEEE Internet of Things Journal, vol. 6, pp. 4774-4781, 2019, ISSN: 2327-4662.
@article{roman2018VIS,
title = {Immune System for the Internet of Things using Edge Technologies},
author = {Rodrigo Roman and Ruben Rios and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/roman2018VIS.pdf
https://ieeexplore.ieee.org/document/8449989/},
doi = {10.1109/JIOT.2018.2867613},
issn = {2327-4662},
year = {2019},
date = {2019-06-01},
urldate = {2019-06-01},
journal = {IEEE Internet of Things Journal},
volume = {6},
pages = {4774-4781},
publisher = {IEEE Computer Society},
abstract = {The Internet of Things (IoT) and Edge Computing are starting to go hand in hand. By providing cloud services close to end-users, edge paradigms enhance the functionality of IoT deployments, and facilitate the creation of novel services such as augmented systems. Furthermore, the very nature of these paradigms also enables the creation of a proactive defense architecture, an immune system, which allows authorized immune cells (e.g., virtual machines) to traverse edge nodes and analyze the security and consistency of the underlying IoT infrastructure. In this article, we analyze the requirements for the development of an immune system for the IoT, and propose a security architecture that satisfies these requirements. We also describe how such a system can be instantiated in Edge Computing infrastructures using existing technologies. Finally, we explore the potential application of immune systems to other scenarios and purposes.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Martin Kolar, Carmen Fernandez-Gago, Javier Lopez
A Model Specification for the Design of Trust Negotiations
In: Computers & Security, vol. 84, pp. 288-300, 2019, ISSN: 0167-4048.
@article{kolar2019trust,
title = {A Model Specification for the Design of Trust Negotiations},
author = {Martin Kolar and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/kolar2019trust.pdf
https://www.sciencedirect.com/science/article/pii/S0167404818310484},
doi = {10.1016/j.cose.2019.03.024},
issn = {0167-4048},
year = {2019},
date = {2019-04-01},
urldate = {2019-04-01},
journal = {Computers \& Security},
volume = {84},
pages = {288-300},
publisher = {Elsevier},
abstract = {Trust negotiation is a type of trust management model for establishing trust between entities by a mutual exchange of credentials. This approach was designed for online environments, where the attributes of users, such as skills, habits, behaviour and experience are unknown. Required criteria of trust negotiation must be supported by a trust negotiation model in order to provide a functional, adequately robust and efficient application. Such criteria were identified previously. In this paper we are presenting a model specification using a UML-based notation for the design of trust negotiation. This specification will become a part of the Software Development Life Cycle, which will provide developers a strong tool for incorporating trust and trust-related issues into the software they create. The specification defines components and their layout for the provision of the essential functionality of trust negotiation on one side as well as optional, additional features on the other side. The extra features make trust negotiation more robust, applicable for more scenarios and may provide a privacy protection functionality.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Sarita Agrawal, Manik Lal Das, Javier Lopez
Detection of Node Capture Attack in Wireless Sensor Networks
In: IEEE Systems Journal, vol. 13, pp. 238 – 247, 2019, ISSN: 1932-8184.
@article{sarita2018,
title = {Detection of Node Capture Attack in Wireless Sensor Networks},
author = {Sarita Agrawal and Manik Lal Das and Javier Lopez},
issn = {1932-8184},
year = {2019},
date = {2019-03-01},
urldate = {2019-03-01},
journal = {IEEE Systems Journal},
volume = {13},
pages = {238 - 247},
publisher = {IEEE},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto, Ruben Rios
Cybersecurity Profiles based on Human-Centric IoT Devices
In: Human-centric Computing and Information Sciences, vol. 9, no. 1, pp. 1-23, 2019, ISSN: 2192-1962.
BibTeX | Links:
@article{HFNR2019,
title = {Cybersecurity Profiles based on Human-Centric IoT Devices},
author = {Ana Nieto and Ruben Rios},
url = {/wp-content/papers/HFNR2019.pdf},
doi = {10.1186/s13673-019-0200-y},
issn = {2192-1962},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
journal = {Human-centric Computing and Information Sciences},
volume = {9},
number = {1},
pages = {1-23},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Davide Ferraris, Carmen Fernandez-Gago
TrUStAPIS: A Trust Requirements Elicitation Method for IoT
In: International Journal of Information Security, pp. 111-127, 2019, ISSN: 1615-5262.
@article{ferraris2019,
title = {TrUStAPIS: A Trust Requirements Elicitation Method for IoT},
author = {Davide Ferraris and Carmen Fernandez-Gago},
url = {/wp-content/papers/ferraris2019.pdf
https://link.springer.com/article/10.1007%2Fs10207-019-00438-x},
doi = {10.1007/s10207-019-00438-x},
issn = {1615-5262},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
journal = {International Journal of Information Security},
pages = {111-127},
publisher = {Springer},
abstract = {The Internet of Things (IoT) is an environment of interconnected entities, which are identifiable, usable and controllable via the Internet. Trust is useful for a system such as the IoT as the entities involved would like to know how the other entities they have to interact with are going to perform.
When developing an IoT entity, it will be desirable to guarantee trust during its whole life cycle. Trust domain is strongly dependent on other domains such as security and privacy.
To consider these domains as a whole and to elicit the right requirements since the first phases of the System Development Life Cycle (SDLC) is a key point when developing an IoT entity.
This paper presents a requirements elicitation method focusing on trust plus other domains such as security, privacy and usability that increase the trust level of the IoT entity developed. To help the developers to elicit the requirements, we propose a JavaScript Notation Object (JSON) template containing all the key elements that must be taken into consideration.
We emphasize on the importance of the concept of traceability. This property permits to connect all the elicited requirements guaranteeing more control on the whole requirements engineering process.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
When developing an IoT entity, it will be desirable to guarantee trust during its whole life cycle. Trust domain is strongly dependent on other domains such as security and privacy.
To consider these domains as a whole and to elicit the right requirements since the first phases of the System Development Life Cycle (SDLC) is a key point when developing an IoT entity.
This paper presents a requirements elicitation method focusing on trust plus other domains such as security, privacy and usability that increase the trust level of the IoT entity developed. To help the developers to elicit the requirements, we propose a JavaScript Notation Object (JSON) template containing all the key elements that must be taken into consideration.
We emphasize on the importance of the concept of traceability. This property permits to connect all the elicited requirements guaranteeing more control on the whole requirements engineering process.
Cristina Alcaraz, Javier Lopez
A Cyber-Physical Systems-Based Checkpoint Model for Structural Controllability
In: IEEE Systems Journal, vol. 12, pp. 3543-3554, 2018, ISSN: 1932-8184.
@article{alcarazlopez-IEEESystems-2017,
title = {A Cyber-Physical Systems-Based Checkpoint Model for Structural Controllability},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/alcarazlopez-IEEESystems-2017.pdf
http://ieeexplore.ieee.org/document/8057984/},
doi = {10.1109/JSYST.2017.2740719},
issn = {1932-8184},
year = {2018},
date = {2018-12-01},
urldate = {2018-12-01},
journal = {IEEE Systems Journal},
volume = {12},
pages = {3543-3554},
publisher = {IEEE},
abstract = {The protection of critical user-centric applications, such as Smart Grids and their monitoring systems, has become one of the most cutting-edge research areas in recent years. The dynamic complexity of their cyber-physical systems (CPSs) and their strong inter-dependencies with power systems, are bringing about a significant increase in security problems that may be exploited by attackers. These security holes may, for example, trigger the disintegration of the structural controllability properties due to the problem of non-locality, affecting, sooner or later, the provision of the essential services to end-users. One way to address these situations could be through automatic checkpoints in charge of inspecting the healthy status of the control network and its critical nature. This inspection can be subject to special mechanisms composed of trustworthy cyberphysical elements capable of detecting structural changes in the control and activating restoration procedures with support for warning. This is precisely the aim of this paper, which presents a CPSs-based checkpoint model with the capacity to manage heterogeneous replications that help ensure data redundancy, thereby guaranteeing the validity of the checkpoints. As a support to this study, a theoretical and practical analysis is addressed to show the functionality of the approach in real contexts.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto, Antonio Acien, Gerardo Fernandez
Crowdsourcing analysis in 5G IoT: Cybersecurity Threats and Mitigation
In: Mobile Networks and Applications (MONET), pp. 881-889, 2018, ISSN: 1383-469X.
@article{NAFMONET2018,
title = {Crowdsourcing analysis in 5G IoT: Cybersecurity Threats and Mitigation},
author = {Ana Nieto and Antonio Acien and Gerardo Fernandez},
url = {/wp-content/papers/NAFMONET2018.pdf},
doi = {10.1007/s11036-018-1146-4},
issn = {1383-469X},
year = {2018},
date = {2018-10-01},
urldate = {2018-10-01},
journal = {Mobile Networks and Applications (MONET)},
pages = {881-889},
publisher = {Springer US},
abstract = {underlineCrowdsourcing can be a powerful weapon against underlinecyberattacks in underline5G networks. In this paper we analyse this idea in detail, starting from the use cases in underlinecrowdsourcing focused on security, and highlighting those areas of a underline5G ecosystem where underlinecrowdsourcing could be used to mitigate local and remote attacks, as well as to discourage criminal activities and underlinecybercriminal behaviour. We pay particular attention to the capillary network, where an infinite number of underlineIoT objects coexist. The analysis is made considering the different participants in a underline5G underlineIoT ecosystem.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Hiroshi Tsunoda, Rodrigo Roman, Javier Lopez, Glenn Mansfield Keeni
Feasibility of Societal Model for Securing Internet of Things
In: KSII Transactions on Internet and Information Systems, vol. 12, no. 8, pp. 3567-3588, 2018, ISSN: 1976-7277.
@article{Hiroshi18IoT,
title = {Feasibility of Societal Model for Securing Internet of Things},
author = {Hiroshi Tsunoda and Rodrigo Roman and Javier Lopez and Glenn Mansfield Keeni},
url = {/wp-content/papers/Hiroshi18IoT.pdf
http://www.itiis.org/digital-library/manuscript/2082},
doi = {10.3837/tiis.2018.08.003},
issn = {1976-7277},
year = {2018},
date = {2018-08-01},
urldate = {2018-08-01},
journal = {KSII Transactions on Internet and Information Systems},
volume = {12},
number = {8},
pages = {3567-3588},
publisher = {KSII},
abstract = {In the Internet of Things (IoT) concept, devices communicate autonomously with applications in the Internet. A significant aspect of IoT that makes it stand apart from present-day networked devices and applications is a) the very large number of devices, produced by diverse makers and used by an even more diverse group of users; b) the applications residing and functioning in what were very private sanctums of life e.g. the car, home, and the people themselves. Since these diverse devices require high-level security, an operational model for an IoT system is required, which has built-in security. We have proposed the societal model as a simple operational model. The basic concept of the model is borrowed from human society \textendash there will be infants, the weak and the handicapped who need to be protected by guardians. This natural security mechanism works very well for IoT networks which seem to have inherently weak security mechanisms. In this paper, we discuss the requirements of the societal model and examine its feasibility by doing a proof-of-concept implementation.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Juan E. Rubio, Cristina Alcaraz
A Resilient Architecture for the Smart Grid
In: IEEE Transactions on Industrial Informatics, vol. 14, pp. 3745-3753, 2018, ISSN: 1551-3203.
@article{transactionInformaticsSG2018,
title = {A Resilient Architecture for the Smart Grid},
author = {Javier Lopez and Juan E. Rubio and Cristina Alcaraz},
url = {/wp-content/papers/transactionInformaticsSG2018.pdf},
doi = {10.1109/TII.2018.2826226},
issn = {1551-3203},
year = {2018},
date = {2018-08-01},
urldate = {2018-08-01},
journal = {IEEE Transactions on Industrial Informatics},
volume = {14},
pages = {3745-3753},
publisher = {IEEE},
abstract = {The Smart Grid offers many benefits due to the bidirectional communication between the users and the utility company, which makes it possible to perform a fine-grain consumption metering. This can be used for Demand Response purposes with the generation and delivery of electricity in real time. It is essential to rapidly anticipate high peaks of demand or potential attacks, so as to avoid power outages and denial of service, while effectively supplying consumption areas. In this paper, we propose a novel architecture where cloud computing resources are leveraged (and tested in practice) to enable, on the one hand, the consumption prediction through time series forecasting, as well as load balancing to uniformly distribute the demand over a set of available generators. On the other and, it also allows the detection of connectivity losses and intrusions within the control network by using controllability concepts.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Rodrigo Roman, Javier Lopez, Stefanos Gritzalis
Evolution and Trends in the Security of the Internet of Things
In: IEEE Computer, vol. 51, pp. 16-25, 2018, ISSN: 0018-9162.
BibTeX | Links:
@article{RomanIoT18,
title = {Evolution and Trends in the Security of the Internet of Things},
author = {Rodrigo Roman and Javier Lopez and Stefanos Gritzalis},
url = {/wp-content/papers/RomanIoT18.pdf
https://ieeexplore.ieee.org/document/8423133/},
doi = {10.1109/MC.2018.3011051},
issn = {0018-9162},
year = {2018},
date = {2018-07-01},
urldate = {2018-07-01},
journal = {IEEE Computer},
volume = {51},
pages = {16-25},
publisher = {IEEE Computer Society},
address = {New Jersey, USA},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ioannis Stellios, Panayiotis Kotzanikolaou, Mihalis Psarakis, Cristina Alcaraz, Javier Lopez
Survey of IoT-enabled Cyberattacks: Assessing Attack Paths to Critical Infrastructures and Services
In: IEEE Communications Surveys and Tutorials, vol. 20, pp. 3453-3495, 2018, ISSN: 1553-877X.
@article{IonnaisPanosMihalisAlcarazLopez2018,
title = {Survey of IoT-enabled Cyberattacks: Assessing Attack Paths to Critical Infrastructures and Services},
author = {Ioannis Stellios and Panayiotis Kotzanikolaou and Mihalis Psarakis and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/IonnaisPanosMihalisAlcarazLopez2018.pdf
https://ieeexplore.ieee.org/document/8410404},
doi = {10.1109/COMST.2018.2855563},
issn = {1553-877X},
year = {2018},
date = {2018-07-01},
urldate = {2018-07-01},
journal = {IEEE Communications Surveys and Tutorials},
volume = {20},
pages = {3453-3495},
publisher = {IEEE},
abstract = {As the deployment of Internet of Things (IoT) is experiencing an exponential growth, it is no surprise that many recent cyber attacks are IoT-enabled: The attacker initially exploits some vulnerable IoT technology as a first step towards compromising a critical system that is connected, in some way, with the IoT. For some sectors, like industry, smart grids, transportation and medical services, the significance of such attacks is obvious, since IoT technologies are part of critical backend systems. However, in sectors where IoT is usually at the enduser side, like smart homes, such attacks can be underestimated, since not all possible attack paths are examined. In this paper we survey IoT-enabled cyber attacks, found in all application domains since 2010. For each sector, we emphasize on the latest, verified IoT-enabled attacks, based on known real-world incidents and published proof-of-concept attacks. We methodologically analyze representative attacks that demonstrate direct, indirect and subliminal attack paths against critical targets. Our goal is threefold: (i) To assess IoT-enabled cyber attacks in a risk-like approach, in order to demonstrate their current threat landscape; (ii) To identify hidden and subliminal IoT-enabled attack paths against critical infrastructures and services, and (iii) To examine mitigation strategies for all application domains.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Lorena Cazorla, Cristina Alcaraz, Javier Lopez
Cyber Stealth Attacks in Critical Information Infrastructures
In: IEEE Systems Journal, vol. 12, pp. 1778-1792, 2018, ISSN: 1932-8184.
@article{cazorla2016cyber,
title = {Cyber Stealth Attacks in Critical Information Infrastructures},
author = {Lorena Cazorla and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/cazorla2016cyber.pdf
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7445136\&isnumber=8350419},
doi = {10.1109/JSYST.2015.2487684},
issn = {1932-8184},
year = {2018},
date = {2018-06-01},
urldate = {2018-06-01},
journal = {IEEE Systems Journal},
volume = {12},
pages = {1778-1792},
publisher = {IEEE},
abstract = {Current Critical Infrastructures (CIs) are complex interconnected industrial systems that, in recent years, have incorporated information and communications technologies such as connection to the Internet and commercial off-the-shelf components. This makes them easier to operate and maintain, but exposes them to the threats and attacks that inundate conventional networks and systems. This paper contains a comprehensive study on the main stealth attacks that threaten CIs, with a special focus on Critical Information Infrastructures (CIIs). This type of attack is characterized by an adversary who is able to finely tune his actions to avoid detection while pursuing his objectives. To provide a complete analysis of the scope and potential dangers of stealth attacks we determine and analyze their stages and range, and we design a taxonomy to illustrate the threats to CIs, offering an overview of the applicable countermeasures against these attacks. From our analysis we understand that these types of attacks, due to the interdependent nature of CIs, pose a grave danger to critical systems where the threats can easily cascade down to the interconnected systems.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz
Cloud-Assisted Dynamic Resilience for Cyber-Physical Control Systems
In: IEEE Wireless Communications, vol. 25, no. 1, pp. 76-82, 2018, ISSN: 1536-1284.
BibTeX | Links:
@article{Alcaraz2018a,
title = {Cloud-Assisted Dynamic Resilience for Cyber-Physical Control Systems},
author = {Cristina Alcaraz},
url = {/wp-content/papers/Alcaraz2018a.pdf
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=8304395\&isnumber=8304374},
doi = {10.1109/MWC.2018.1700231},
issn = {1536-1284},
year = {2018},
date = {2018-02-01},
urldate = {2018-02-01},
journal = {IEEE Wireless Communications},
volume = {25},
number = {1},
pages = {76-82},
publisher = {IEEE},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ana Nieto, Ruben Rios, Javier Lopez
IoT-Forensics meets Privacy: Towards Cooperative Digital Investigations
In: Sensors, vol. 18, no. 492, 2018, ISSN: 1424-8220.
@article{nrlSensors2018,
title = {IoT-Forensics meets Privacy: Towards Cooperative Digital Investigations},
author = {Ana Nieto and Ruben Rios and Javier Lopez},
url = {/wp-content/papers/nrlSensors2018.pdf
http://www.mdpi.com/1424-8220/18/2/492},
doi = {10.3390/s18020492},
issn = {1424-8220},
year = {2018},
date = {2018-02-01},
urldate = {2018-02-01},
journal = {Sensors},
volume = {18},
number = {492},
publisher = {MDPI},
abstract = {IoT-Forensics is a novel paradigm for the acquisition of electronic evidence whose operation is conditioned by the peculiarities of the Internet of Things (IoT) context. As a branch of computer forensics, this discipline respects the most basic forensic principles of preservation, traceability, documentation, and authorization. The digital witness approach also promotes such principles in the context of the IoT while allowing personal devices to cooperate in digital investigations by voluntarily providing electronic evidence to the authorities. However, this solution is highly dependent on the willingness of citizens to collaborate and they may be reluctant to do so if the sensitive information within their personal devices is not sufficiently protected when shared with the investigators. In this paper, we provide the digital witness approach with a methodology that enables citizens to share their data with some privacy guarantees. We apply the PRoFIT methodology, originally defined for IoT-Forensics environments, to the digital witness approach in order to unleash its full potential. Finally, we show the feasibility of a PRoFIT-compliant digital witness with two use cases.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Juan E. Rubio
Access control for cyber-physical systems interconnected to the cloud
In: Computer Networks, vol. 134, pp. 46 – 54, 2018, ISSN: 1389-1286.
BibTeX | Links:
@article{LOPEZ201846,
title = {Access control for cyber-physical systems interconnected to the cloud},
author = {Javier Lopez and Juan E. Rubio},
url = {/wp-content/papers/LOPEZ201846.pdf
http://www.sciencedirect.com/science/article/pii/S1389128618300501},
doi = {10.1016/j.comnet.2018.01.037},
issn = {1389-1286},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
journal = {Computer Networks},
volume = {134},
pages = {46 - 54},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Javier Lopez, Masahiro Mambo
Mobile edge computing, Fog et al.: A survey and analysis of security threats and challenges
In: Future Generation Computer Systems, vol. 78, pp. 680-698, 2018, ISSN: 0167-739X.
@article{RomanFog16,
title = {Mobile edge computing, Fog et al.: A survey and analysis of security threats and challenges},
author = {Rodrigo Roman and Javier Lopez and Masahiro Mambo},
url = {/wp-content/papers/RomanFog16.pdf
https://authors.elsevier.com/c/1VmhQ,3q5xKgZZ},
doi = {10.1016/j.future.2016.11.009},
issn = {0167-739X},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
journal = {Future Generation Computer Systems},
volume = {78},
pages = {680-698},
publisher = {Elsevier},
abstract = {For various reasons, the cloud computing paradigm is unable to meet certain requirements (e.g. low latency and jitter, context awareness, mobility support) that are crucial for several applications (e.g. vehicular networks, augmented reality). To fulfil these requirements, various paradigms, such as fog computing, mobile edge computing, and mobile cloud computing, have emerged in recent years. While these edge paradigms share several features, most of the existing research is compartmentalised; no synergies have been explored. This is especially true in the field of security, where most analyses focus only on one edge paradigm, while ignoring the others. The main goal of this study is to holistically analyse the security threats, challenges, and mechanisms inherent in all edge paradigms, while highlighting potential synergies and venues of collaboration. In our results, we will show that all edge paradigms should consider the advances in other paradigms.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ruben Rios, Carmen Fernandez-Gago, Javier Lopez
Modelling Privacy-Aware Trust Negotiations
In: Computers & Security, vol. 77, pp. 773-789, 2018, ISSN: 0167-4048.
@article{Ruben2017trust,
title = {Modelling Privacy-Aware Trust Negotiations},
author = {Ruben Rios and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Ruben2017trust.pdf},
doi = {10.1016/j.cose.2017.09.015},
issn = {0167-4048},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
journal = {Computers \& Security},
volume = {77},
pages = {773-789},
publisher = {Elsevier},
abstract = {Trust negotiations are mechanisms that enable interaction between previously unknown users. After exchanging various pieces of potentially sensitive information, the participants of a negotiation can decide whether or not to trust one another. Therefore, trust negotiations bring about threats to personal privacy if not carefully considered. This paper presents a framework for representing trust negotiations in the early phases of the Software Development Life Cycle (SDLC). The framework can help software engineers to determine the most suitable policies for the system by detecting conflicts between privacy and trust requirements. More precisely, we extend the SI* modelling language and provide a set of predicates for defining trust and privacy policies and a set of rules for describing the dynamics of the system based on the established policies. The formal representation of the model facilitates its automatic verification. The framework has been validated in a distributed social network scenario for connecting drivers with potential passengers willing to share a journey.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto, Nikolaos Nomikos, Javier Lopez, Charalambos Skianis
Dynamic Knowledge-based Analysis in non-Secure 5G Green Environments using Contextual Data
In: IEEE Systems Journal, vol. 11, no. 99, pp. 2479-2489, 2017, ISSN: 1932-8184.
@article{NietNLS15,
title = {Dynamic Knowledge-based Analysis in non-Secure 5G Green Environments using Contextual Data},
author = {Ana Nieto and Nikolaos Nomikos and Javier Lopez and Charalambos Skianis},
url = {/wp-content/papers/NietNLS15.pdf},
doi = {10.1109/JSYST.2015.2477782},
issn = {1932-8184},
year = {2017},
date = {2017-12-01},
urldate = {2017-12-01},
journal = {IEEE Systems Journal},
volume = {11},
number = {99},
pages = {2479-2489},
publisher = {IEEE},
abstract = {The growing number of parameters in heteroge- neous networks, as is the case of the emphfifth generation (5G) Green networks, greatly complicates the analysis of the emphSecurity and Quality of Service Tradeoff (SQT). However, studying these types of relationships is crucial in Future Internet scenarios to prevent potential points of failure and to enhance the use of limited resources, increasing the user’s experience. Therefore, it is fundamental to provide tools and models for training, so that the users understand these dependencies and solve them prior to deploying new solutions. In this paper, a Recommendation System for SQT (SQT-RS) is deployed in 5G Green systems, considering the particular case of relay networks and the impact of eavesdropping and jamming contexts on the models generated by the user, aided by SQT-RS. With this goal in mind, we provide a component for the user to automatically select specific contexts based on 5G Green capabilities.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz
Resilient Industrial Control Systems based on Multiple Redundancy
In: International Journal of Critical Infrastructures (IJCIS), vol. 13, no. 2/3, pp. 278 – 295, 2017, ISSN: 1741-8038.
@article{Alcaraz_2017_IJCIS,
title = {Resilient Industrial Control Systems based on Multiple Redundancy},
author = {Cristina Alcaraz},
doi = {10.1504/IJCIS.2017.10009287},
issn = {1741-8038},
year = {2017},
date = {2017-11-01},
urldate = {2017-11-01},
journal = {International Journal of Critical Infrastructures (IJCIS)},
volume = {13},
number = {2/3},
pages = {278 - 295},
publisher = {Inderscience Publisher},
address = {London, UK},
abstract = {The incessant search for cost-effective recovery solutions for structural controllability has led to one of the most challenging research areas within the field of critical infrastructure protection. The resilience of large heterogeneous distributions, like industrial control scenarios, is proving to be a complicated mission due to the inherent non-locality problems of structural controllability and its susceptibility to advanced threats. To address these issues, this paper proposes a new repair approach based on multiple redundant pathways and the lessons learnt from the work presented in [1]. From [1], we have adapted the local measures, to combine them with each of the five strategies of remote reconnection described in this paper. To validate the sustainability of the combined approaches, two practical case studies are presented here, showing that a local dependence on a brother driver node together with remote dependence is enough to reach optimal states in linear times.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Javier Lopez, Kim-Kwang Raymond Choo
Resilient Interconnection in Cyber-Physical Control Systems
In: Computers & Security, vol. 71, pp. 2-14, 2017, ISSN: 0167-4048.
@article{Alcaraz2017COSE,
title = {Resilient Interconnection in Cyber-Physical Control Systems},
author = {Cristina Alcaraz and Javier Lopez and Kim-Kwang Raymond Choo},
url = {/wp-content/papers/Alcaraz2017COSE.pdf
http://www.sciencedirect.com/science/article/pii/S0167404817300573},
doi = {10.1016/j.cose.2017.03.004},
issn = {0167-4048},
year = {2017},
date = {2017-11-01},
urldate = {2017-11-01},
journal = {Computers \& Security},
volume = {71},
pages = {2-14},
publisher = {Elsevier},
abstract = {Secure interconnection between multiple cyber-physical systems has become a fundamental requirement in many critical infrastructures, where security may be centralized in a few nodes of the system. These nodes could, for example, have the mission of addressing the authorization services required for access in highlyrestricted remote substations. For this reason, the main aim of this paper is to unify all these features, together with the resilience measures so as to provide control at all times under a limited access in the field and avoid congestion. Concretely, we present here an optimal reachability-based restoration approach, capable of restoring the structural control in linear times taking into account: structural controllability, the supernode theory, the good practices of the IEC-62351 standard and the contextual conditions. For context management, a new attribute is specified to provide a more complete authorization service based on a practical policy, role and attribute-based access control (PBAC + RBAC + ABAC). To validate the approach, two case studies are also discussed under two strategic adversarial models.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Ruben Rios, Feng Bao, Guilin Wang
Evolving privacy: From sensors to the Internet of Things
In: Future Generation Computer Systems, vol. 75, pp. 46–57, 2017, ISSN: 0167-739X.
@article{Lopez2017iotpriv,
title = {Evolving privacy: From sensors to the Internet of Things},
author = {Javier Lopez and Ruben Rios and Feng Bao and Guilin Wang},
url = {/wp-content/papers/Lopez2017iotpriv.pdf},
doi = {10.1016/j.future.2017.04.045},
issn = {0167-739X},
year = {2017},
date = {2017-10-01},
urldate = {2017-10-01},
journal = {Future Generation Computer Systems},
volume = {75},
pages = {46\textendash57},
publisher = {Elsevier},
abstract = {The Internet of Things (IoT) envisions a world covered with billions of smart, interacting things capable of offering all sorts of services to near and remote entities. The benefits and comfort that the IoT will bring about are undeniable, however, these may come at the cost of an unprecedented loss of privacy. In this paper we look at the privacy problems of one of the key enablers of the IoT, namely wireless sensor networks, and analyse how these problems may evolve with the development of this complex paradigm. We also identify further challenges which are not directly associated with already existing privacy risks but will certainly have a major impact in our lives if not taken into serious consideration.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Juan E. Rubio, Cristina Alcaraz, Javier Lopez
Recommender System for Privacy-Preserving Solutions in Smart Metering
In: Pervasive and Mobile Computing, vol. 41, pp. 205-218, 2017, ISSN: 1574-1192.
@article{rubiorecommender17,
title = {Recommender System for Privacy-Preserving Solutions in Smart Metering},
author = {Juan E. Rubio and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/rubiorecommender17.pdf},
issn = {1574-1192},
year = {2017},
date = {2017-10-01},
urldate = {2017-10-01},
journal = {Pervasive and Mobile Computing},
volume = {41},
pages = {205-218},
publisher = {Pervasive and Mobile Computing},
abstract = {Nowadays, Smart Grid is envisaged to provide several benefits to both customers and grid operators. However, Smart Meters introduce many privacy issues if consumption data is analysed. In this paper we analyse the main techniques that address privacy when collecting electricity readings. In addition to privacy, it is equally important to preserve efficiency to carry on with monitoring operations, so further control requirements and communication protocols are also studied. Our aim is to provide guidance to installers who intend to integrate such mechanisms on the grid, presenting an expert system to recommend an appropriate deployment strategy.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

David Nuñez, Isaac Agudo, Javier Lopez
Proxy Re-Encryption: Analysis of Constructions and its Application to Secure Access Delegation
In: Journal of Network and Computer Applications, vol. 87, pp. 193-209, 2017, ISSN: 1084-8045.
@article{nunez2017proxy,
title = {Proxy Re-Encryption: Analysis of Constructions and its Application to Secure Access Delegation},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2017proxy.pdf},
doi = {10.1016/j.jnca.2017.03.005},
issn = {1084-8045},
year = {2017},
date = {2017-06-01},
urldate = {2017-06-01},
journal = {Journal of Network and Computer Applications},
volume = {87},
pages = {193-209},
publisher = {Elsevier},
abstract = {This paper analyzes the secure access delegation problem, which occurs naturally in the cloud, and postulate that Proxy Re-Encryption is a feasible cryptographic solution, both from the functional and efficiency perspectives. Proxy re-encryption is a special type of public-key encryption that permits a proxy to transform ciphertexts from one public key to another, without the proxy being able to learn any information about the original message. Thus, it serves as a means for delegating decryption rights, opening up many possible applications that require of delegated access to encrypted data. In particular, sharing information in the cloud is a prime example. In this paper, we review the main proxy re-encryption schemes so far, and provide a detailed analysis of their characteristics. Additionally, we also study the efficiency of selected schemes, both theoretically and empirically, based on our own implementation. Finally, we discuss some applications of proxy re-encryption, with a focus on secure access delegation in the cloud.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez, Stephen Wolthusen
OCPP Protocol: Security Threats and Challenges
In: IEEE Transactions on Smart Grid, vol. 8, pp. 2452 – 2459, 2017, ISSN: 1949-3053.
@article{AlcarazLopezWolthusen2017,
title = {OCPP Protocol: Security Threats and Challenges},
author = {Cristina Alcaraz and Javier Lopez and Stephen Wolthusen},
url = {/wp-content/papers/AlcarazLopezWolthusen2017.pdf},
doi = {10.1109/TSG.2017.2669647},
issn = {1949-3053},
year = {2017},
date = {2017-02-01},
urldate = {2017-02-01},
journal = {IEEE Transactions on Smart Grid},
volume = {8},
pages = {2452 - 2459},
publisher = {IEEE},
abstract = {One benefit postulated for the adoption of Electric Vehicles (EVs) is their ability to act as stabilizing entities in smart grids through bi-directional charging, allowing local or global smoothing of peaks and imbalances. This benefit, however, hinges indirectly on the reliability and security of the power flows thus achieved. Therefore this paper studies key security properties of the alreadydeployed Open Charge Point Protocol (OCPP) specifying communication between charging points and energy management systems. It is argued that possible subversion or malicious endpoints in the protocol can also lead to destabilization of power networks. Whilst reviewing these aspects, we focus, from a theoretical and practical standpoint, on attacks that interfere with resource reservation originating with the EV, which may also be initiated by a man in the middle, energy theft or fraud. Such attacks may even be replicated widely, resulting in over- or undershooting of power network provisioning, or the (total/partial) disintegration of the integrity and stability of power networks.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Carmen Fernandez-Gago, Francisco Moyano, Javier Lopez
Modelling Trust Dynamics in the Internet of Things
In: Information Sciences, vol. 396, pp. 72-82, 2017, ISSN: 0020-0255.
@article{Fer_IS17,
title = {Modelling Trust Dynamics in the Internet of Things},
author = {Carmen Fernandez-Gago and Francisco Moyano and Javier Lopez},
url = {/wp-content/papers/Fer_IS17.pdf},
doi = {10.1016/j.ins.2017.02.039},
issn = {0020-0255},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
journal = {Information Sciences},
volume = {396},
pages = {72-82},
publisher = {Elsevier},
abstract = {The Internet of Things (IoT) is a paradigm based on the interconnection of everyday objects. It is expected that the ‘things’ involved in the IoT paradigm will have to interact with each other, often in uncertain conditions. It is therefore of paramount importance for the success of IoT that there are mechanisms in place that help overcome the lack of certainty. Trust can help achieve this goal. In this paper, we introduce a framework that assists developers in including trust in IoT scenarios. This framework takes into account trust, privacy and identity requirements as well as other functional requirements derived from IoT scenarios to provide the different services that allow the inclusion of trust in the IoT.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto, Rodrigo Roman, Javier Lopez
Testificación Digital
In: Revista SIC, vol. 122, pp. 94-98, 2016, ISSN: 1136-0623.
@article{nrlSIC16,
title = {Testificaci\'{o}n Digital},
author = {Ana Nieto and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/nrlSIC16.pdf
https://revistasic.es/index.php?option=com_content\&view=article\&id=1713\&Itemid=1498},
issn = {1136-0623},
year = {2016},
date = {2016-11-01},
urldate = {2016-11-01},
journal = {Revista SIC},
volume = {122},
pages = {94-98},
publisher = {Ediciones CODA},
abstract = {El creciente n\'{u}mero de dispositivos interconectados trae consigo problemas de seguridad bien conocidos; por ejemplo, aquellos debidos a las vulnerabilidades en protocolos muy diversos \textendashmuchos de ellos propietarios\textendash y al factor de error humano introducido por los usuarios. Sin embargo, cabe preguntarse c\'{o}mo podemos usar el despliegue de tales dispositivos en beneficio de la ciberseguridad. En el proyecto IoTest se est\'{a} desarrollando una soluci\'{o}n, el Testigo Digital, que permitir\'{a} a los dispositivos personales con arquitectura de seguridad embebida reaccionar ante ataques virtuales, protegi\'{e}ndonos de los ciberataques emergentes.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

David Nuñez, Isaac Agudo, Javier Lopez
On the Application of Generic CCA-Secure Transformations to Proxy Re-Encryption
In: Security and Communication Networks, vol. 9, pp. 1769-1785, 2016, ISSN: 1939-0114.
@article{nunez2016application,
title = {On the Application of Generic CCA-Secure Transformations to Proxy Re-Encryption},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2016application.pdf},
doi = {10.1002/sec.1434},
issn = {1939-0114},
year = {2016},
date = {2016-08-01},
urldate = {2016-08-01},
journal = {Security and Communication Networks},
volume = {9},
pages = {1769-1785},
publisher = {Wiley},
abstract = {Several generic methods exist for achieving chosen-ciphertext attack (CCA)-secure public-key encryption schemes from weakly secure cryptosystems, such as the Fujisaki\textendashOkamoto and REACT transformations. In the context of proxy re-encryption (PRE), it would be desirable to count on analogous constructions that allow PRE schemes to achieve better security notions. In this paper, we study the adaptation of these transformations to proxy re-encryption and find both negative and positive results. On the one hand, we show why it is not possible to directly integrate these transformations with weakly secure PRE schemes because of general obstacles coming from both the constructions themselves and the security models, and we identify 12 PRE schemes that exhibit these problems. On the other hand, we propose an extension of the Fujisaki\textendashOkamoto transformation for PRE, which achieves a weak form of CCA security in the random oracle model, and we describe the sufficient conditions for applying it},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

David Nuñez, Carmen Fernandez-Gago, Jesús Luna
Eliciting Metrics for Accountability of Cloud Systems
In: Computers & Security, vol. 62, pp. 149-164, 2016, ISSN: 0167-4048.
@article{nunez2016eliciting,
title = {Eliciting Metrics for Accountability of Cloud Systems},
author = {David Nu\~{n}ez and Carmen Fernandez-Gago and Jes\'{u}s Luna},
url = {/wp-content/papers/nunez2016eliciting.pdf},
doi = {10.1016/j.cose.2016.07.003},
issn = {0167-4048},
year = {2016},
date = {2016-08-01},
urldate = {2016-08-01},
journal = {Computers \& Security},
volume = {62},
pages = {149-164},
publisher = {Elsevier},
abstract = {Cloud computing provides enormous business opportunities, but at the same time is a complex and challenging paradigm. The major concerns for users adopting the cloud are the loss of control over their data and the lack of transparency. Providing accountability to cloud systems could foster trust in the cloud and contribute toward its adoption. Assessing how accountable a cloud provider is becomes then a key issue, not only for demonstrating accountability, but to build it. To this end, we need techniques to measure the factors that influence on accountability. In this paper, we provide a methodology to elicit metrics for accountability in the cloud, which consists of three different stages. Since the nature of accountability at- tributes is very abstract and complex, in the first stage we perform a conceptual analysis of the accountability attributes in order to decompose them into concrete practices and mechanisms. Then, we analyze relevant control frameworks designed to guide the implementation of security and privacy mechanisms, and use them to identify measurable factors, related to the practices and mechanisms defined earlier. Lastly, specific metrics for these factors are derived. We also provide some strategies that we consider relevant for the empirical validation of the elicited accountability metrics.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ana Nieto, Rodrigo Roman, Javier Lopez
Digital Witness: Digital Evidence Management Framework for the Internet of Things
In: ERCIM News, no. 106, pp. 9-9, 2016, ISSN: 0926-4981.
BibTeX | Links:
@article{ercim-nrl16,
title = {Digital Witness: Digital Evidence Management Framework for the Internet of Things},
author = {Ana Nieto and Rodrigo Roman and Javier Lopez},
url = {http://ercim-news.ercim.eu/images/stories/EN106/EN106-web.pdf},
issn = {0926-4981},
year = {2016},
date = {2016-07-01},
urldate = {2016-07-01},
journal = {ERCIM News},
number = {106},
pages = {9-9},
publisher = {ERCIM EEIG},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
A Model-driven Approach for Engineering Trust and Reputation into Software Services
In: Journal of Network and Computer Applications, vol. 69, pp. 134-151, 2016, ISSN: 1084-8045.
BibTeX | Links:
@article{JNCA16,
title = {A Model-driven Approach for Engineering Trust and Reputation into Software Services},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/JNCA16.pdf},
issn = {1084-8045},
year = {2016},
date = {2016-04-01},
urldate = {2016-04-01},
journal = {Journal of Network and Computer Applications},
volume = {69},
pages = {134-151},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto, Rodrigo Roman, Javier Lopez
Digital Witness: Safeguarding Digital Evidence by using Secure Architectures in Personal Devices
In: IEEE Network, pp. 12-19, 2016, ISSN: 0890-8044.
@article{ieeenet16-nrl,
title = {Digital Witness: Safeguarding Digital Evidence by using Secure Architectures in Personal Devices},
author = {Ana Nieto and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/ieeenet16-nrl.pdf
http://ieeexplore.ieee.org/document/7764297/$#$full-text-section},
doi = {10.1109/MNET.2016.1600087NM},
issn = {0890-8044},
year = {2016},
date = {2016-01-01},
urldate = {2016-01-01},
journal = {IEEE Network},
pages = {12-19},
publisher = {IEEE Communications Society},
abstract = {Personal devices contain electronic evidence associated with the behaviour of their owners and other devices in their environment, which can help clarify the facts of a cyber-crime scene. These devices are usually analysed as containers of proof. However, it is possible to harness the boom of personal devices to define the concept of digital witnesses, where personal devices are able to actively acquire, store, and transmit digital evidence to an authorised entity, reliably and securely. This article introduces this novel concept, providing a preliminary analysis on the management of digital evidence and the technologies that can be used to implement it with security guarantees in IoT environments. Moreover, the basic building blocks of a digital witness are defined.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez, Stephen Wolthusen
Policy Enforcement System for Secure Interoperable Control in Distributed Smart Grid Systems
In: Journal of Network and Computer Applications, vol. 59, pp. 301–314, 2016, ISSN: 1084-8045.
@article{alcaraz2016POL,
title = {Policy Enforcement System for Secure Interoperable Control in Distributed Smart Grid Systems},
author = {Cristina Alcaraz and Javier Lopez and Stephen Wolthusen},
url = {/wp-content/papers/alcaraz2016POL.pdf},
issn = {1084-8045},
year = {2016},
date = {2016-01-01},
urldate = {2016-01-01},
journal = {Journal of Network and Computer Applications},
volume = {59},
pages = {301\textendash314},
publisher = {Elsevier},
abstract = {Interoperability of distributed systems in charge of monitoring and maintaining the different critical domains belonging to Smart Grid scenarios comprise the central topic of this paper. Transparency in control transactions under a secure and reliable architecture is the aim of the policy enforcement system proposed here. The approach is based on the degree of observation of a context and on the emphrole-based access control model defined by the IEC-62351-8 standard. Only authenticated and authorised entities are able to take control of those distributed elements (e.g., IEC-61850 objects) located at distant geographical locations and close to the critical infrastructures (e.g., substations). To ensure the effectiveness of the approach, it is built on graphical-theoretical formulations corresponding to graph theory, where it is possible to illustrate power control networks through power-law distributions whose monitoring relies on emphstructural controllability theory. The interconnection of these distributions is subject to a network architecture based on the concept of the emphsupernode where the interoperability depends on a simple rule-based expert system. This expert system focuses not only on accepting or denying access, but also on providing the means to attend to extreme situations, avoiding, as much as possible, the overloading of the communication. Through one practical study we also show the functionalities of the approach and the benefits that the authorisation itself can bring to the emphinteroperability.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ana Nieto, Javier Lopez
Contextualising Heterogeneous Information in Unified Communications with Security Restrictions
In: Computer Communications, vol. 68, pp. 33-46, 2015, ISSN: 0140-3664.
@article{NL-COMCOM15,
title = {Contextualising Heterogeneous Information in Unified Communications with Security Restrictions},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/NL-COMCOM15.pdf
http://www.sciencedirect.com/science/article/pii/S0140366415002534},
doi = {10.1016/j.comcom.2015.07.015},
issn = {0140-3664},
year = {2015},
date = {2015-09-01},
urldate = {2015-09-01},
journal = {Computer Communications},
volume = {68},
pages = {33-46},
publisher = {Elsevier},
abstract = {The lack of abstraction in a growing semantic, virtual and abstract world poses new challenges for assessing security and QoS tradeoffs. For example, in Future Internet scenarios, where Unified Communications (UC) will take place, being able to predict the final devices that will form the network is not always possible. Without this information the analysis of the security and QoS tradeoff can only be based on partial information to be completed when more information about the environment is available. In this paper, we extend the description of context-based parametric relationship model, providing a tool for assessing the security and QoS tradeoff (SQT) based on interchangeable contexts. Our approach is able to use the heterogeneous information produced by scenarios where UC is present.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ruben Rios, Jorge Cuellar, Javier Lopez
Probabilistic receiver-location privacy protection in wireless sensor networks
In: Information Sciences, vol. 321, pp. 205 – 223, 2015, ISSN: 0020-0255.
@article{rios2015,
title = {Probabilistic receiver-location privacy protection in wireless sensor networks},
author = {Ruben Rios and Jorge Cuellar and Javier Lopez},
url = {/wp-content/papers/rios2015.pdf},
doi = {10.1016/j.ins.2015.01.016},
issn = {0020-0255},
year = {2015},
date = {2015-07-01},
urldate = {2015-07-01},
journal = {Information Sciences},
volume = {321},
pages = {205 - 223},
publisher = {Elsevier},
abstract = {Wireless sensor networks (WSNs) are continually exposed to many types of attacks. Among these, the attacks targeted at the base station are the most devastating ones since this essential device processes and analyses all traffic generated in the network. Moreover, this feature can be exploited by a passive adversary to determine its location based on traffic analysis. This receiver-location privacy problem can be reduced by altering the traffic pattern of the network but the adversary may still be able to reach the base station if he gains access to the routing tables of a number of sensor nodes. In this paper we present HISP-NC (Homogenous Injection for Sink Privacy with Node Compromise protection), a receiver-location privacy solution that consists of two complementary schemes which protect the location of the base station in the presence of traffic analysis and node compromise attacks. The HISP-NC data transmission protocol prevents traffic analysis by probabilistically hiding the flow of real traffic with moderate amounts of fake traffic. Moreover, HISP-NC includes a perturbation mechanism that modifies the routing tables of the nodes to introduce some level of uncertainty in attackers capable of retrieving the routing information from the nodes. Our scheme is validated both analytically and experimentally through extensive simulations.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Nikolaos Nomikos, Ana Nieto, Prodromos Makris, Dimitrios N. Skoutas, Demosthenes Vouyioukas, Panagiotis Rizomiliotis, Javier Lopez, Charalambos Skianis
Relay Selection for Secure 5G Green Communications
In: Telecommunication Systems, vol. 59, pp. 169-187, 2015, ISSN: 1018-4864.
@article{NNMSVRLS,
title = {Relay Selection for Secure 5G Green Communications},
author = {Nikolaos Nomikos and Ana Nieto and Prodromos Makris and Dimitrios N. Skoutas and Demosthenes Vouyioukas and Panagiotis Rizomiliotis and Javier Lopez and Charalambos Skianis},
doi = {10.1007/s11235-014-9890-7},
issn = {1018-4864},
year = {2015},
date = {2015-05-01},
urldate = {2015-05-01},
journal = {Telecommunication Systems},
volume = {59},
pages = {169-187},
publisher = {Springer US},
abstract = {In this article, we present relay selection policies in applications with secrecy requirements which are of interest in the emphfifth generation (5G) of wireless networks. More specifically, we provide a classification of relays based on their distinct communication attributes, such as processing, multiple antennas, storage, channel estimation, density and security level. In addition, we discuss the level of efficiency exhibited by each relay class, regarding their impact in delay-critical applications and green communications applications, while aiming at a specific security level at the physical layer. Then, relay selection policies are proposed taking into consideration the goals set by each application. Numerical evaluation of the proposed policies in terms of the average secrecy rate, average delay and power reduction show improved performance compared to other state-of-the-art solutions.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Lorena Cazorla, Cristina Alcaraz, Javier Lopez
Awareness and Reaction Strategies for Critical Infrastructure Protection
In: Computers and Electrical Engineering, vol. 47, pp. 299-317, 2015, ISSN: 0045-7906.
@article{cazorla2015b,
title = {Awareness and Reaction Strategies for Critical Infrastructure Protection},
author = {Lorena Cazorla and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/cazorla2015b.pdf},
doi = {10.1016/j.compeleceng.2015.08.010},
issn = {0045-7906},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Computers and Electrical Engineering},
volume = {47},
pages = {299-317},
publisher = {Elsevier},
abstract = {Current Critical Infrastructures (CIs) need intelligent automatic active reaction mechanisms to protect their critical processes against cyber attacks or system anomalies, and avoid the disruptive consequences of cascading failures between interdependent and interconnected systems. In this paper we study the Intrusion Detection, Prevention and Response Systems (IDPRS) that can offer this type of protection mechanisms, their constituting elements and their applicability to critical contexts. We design a methodological framework determining the essential elements present in the IDPRS, while evaluating each of their sub-components in terms of adequacy for critical contexts. We review the different types of active and passive countermeasures available, categorizing them and assessing whether or not they are suitable for Critical Infrastructure Protection (CIP). Through our study we look at different reaction systems and learn from them how to better create IDPRS solutions for CIP.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Sherali Zeadally
Critical Infrastructure Protection: Requirements and Challenges for the 21st Century
In: International Journal of Critical Infrastructure Protection (IJCIP), vol. 8, pp. 53–66, 2015, ISSN: 1874-5482.
@article{alcaraz2015CRI,
title = {Critical Infrastructure Protection: Requirements and Challenges for the 21st Century},
author = {Cristina Alcaraz and Sherali Zeadally},
url = {/wp-content/papers/alcaraz2015CRI.pdf
http://www.sciencedirect.com/science/article/pii/S1874548214000791},
doi = {10.1016/j.ijcip.2014.12.002},
issn = {1874-5482},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {International Journal of Critical Infrastructure Protection (IJCIP)},
volume = {8},
pages = {53\textendash66},
publisher = {Elsevier Science},
abstract = {Critical infrastructures play a vital role in supporting modern society. The reliability, performance, continuous operation, safety, maintenance and protection of critical infrastructures are national priorities for countries around the world. This paper explores the vulnerabilities and threats facing modern critical infrastructures with special emphasis on industrial control systems, and describes a number of protection measures. The paper also discusses some of the challenging areas related to critical infrastructure protection such as governance and security management, secure network architectures, self-healing, modeling and simulation, wide-area situational awareness, forensics and learning, and trust management and privacy.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Lorena Cazorla, Cristina Alcaraz, Javier Lopez
A Three-Stage Analysis of IDS for Critical Infrastructures
In: Computers & Security, vol. 55, no. November, pp. 235-250, 2015, ISSN: 0167-4048.
@article{lorena2015c,
title = {A Three-Stage Analysis of IDS for Critical Infrastructures},
author = {Lorena Cazorla and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/lorena2015c.pdf},
issn = {0167-4048},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Computers \& Security},
volume = {55},
number = {November},
pages = {235-250},
publisher = {Elsevier},
abstract = {The correct operation of Critical Infrastructures (CIs) is vital for the well being of society, however these complex systems are subject to multiple faults and threats every day. International organizations around the world are alerting the scientific community to the need for protection of CIs, especially through preparedness and prevention mechanisms. One of the main tools available in this area is the use of Intrusion Detection Systems (IDSs). However, in order to deploy this type of component within a CI, especially within its Control System (CS), it is necessary to verify whether the characteristics of a given IDS solution are compatible with the special requirements and constraints of a critical environment. In this paper, we carry out an extensive study to determine the requirements imposed by the CS on the IDS solutions using the Non-Functional Requirements (NFR) Framework. The outcome of this process are the abstract properties that the IDS needs to satisfy in order to be deployed within a CS, which are refined through the identification of satisficing techniques for the NFRs. To provide quantifiable measurable evidence on the suitability of the IDS component for a CI, we broaden our study using the Goal Question Metric (GQM) approach to select a representative set of metrics. A requirements model, refined with satisficing techniques and sets of metrics which help assess, in the most quantifiable way possible, the suitability and performance of a given IDS solution for a critical scenario, constitutes the results of our analysis.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose A. Montenegro, Javier Lopez
A practical solution for sealed bid and multi-currency auctions
In: Computers & Security, vol. 45, pp. 186-198, 2014, ISSN: 0167-4048.
@article{MoLo15,
title = {A practical solution for sealed bid and multi-currency auctions},
author = {Jose A. Montenegro and Javier Lopez},
url = {/wp-content/papers/MoLo15.pdf},
doi = {10.1016/j.cose.2014.06.004},
issn = {0167-4048},
year = {2014},
date = {2014-09-01},
urldate = {2014-09-01},
journal = {Computers \& Security},
volume = {45},
pages = {186-198},
publisher = {Elsevier},
abstract = {This paper introduces a sealed bid and underlinemulti-currency auction using secure multiparty computation (underlineSMC).
Two boolean functions, a comparison and multiplication function, have been designed as required to apply underlineSMC. These functions are applied without revealing any information, not even to trusted third parties such as the auctioneer. A type of Zero Knowledge proof, discreet proof, has been implemented with three variants, interactive, regular and reduced non interactive proofs. These proofs make it possible to verify the correctness of the functions whilst preserving the privacy of the bid values. Moreover, a system performance evaluation of the proposal has been realized on heterogeneous platforms, including a mobile platform. The evaluation concludes that our proposal is practical even on mobile platforms.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Two boolean functions, a comparison and multiplication function, have been designed as required to apply underlineSMC. These functions are applied without revealing any information, not even to trusted third parties such as the auctioneer. A type of Zero Knowledge proof, discreet proof, has been implemented with three variants, interactive, regular and reduced non interactive proofs. These proofs make it possible to verify the correctness of the functions whilst preserving the privacy of the bid values. Moreover, a system performance evaluation of the proposal has been realized on heterogeneous platforms, including a mobile platform. The evaluation concludes that our proposal is practical even on mobile platforms.
Ana Nieto, Javier Lopez
A Model for the Analysis of QoS and Security Tradeoff in Mobile Platforms
In: Mobile Networks and Applications (MONET) Journal, vol. 19, pp. 64-78, 2014, ISSN: 1383-469X.
@article{nieto2013mone,
title = {A Model for the Analysis of QoS and Security Tradeoff in Mobile Platforms},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/nieto2013mone.pdf
},
doi = {10.1007/s11036-013-0462-y},
issn = {1383-469X},
year = {2014},
date = {2014-02-01},
urldate = {2014-02-01},
journal = {Mobile Networks and Applications (MONET) Journal},
volume = {19},
pages = {64-78},
publisher = {Springer US},
abstract = {Today, mobile platforms are multimedia devices that provide different types of traffic with the consequent particular performance demands and, besides, security concerns (e.g. privacy). However, Security and QoS requirements quite often conflict to a large degree; the mobility and heterogeneous paradigm of the Future Internet makes coexistence even more difficult, posing new challenges to overcome. Probably, one of the main challenges is to identify the specific reasons why Security and QoS mechanisms are so related to each other. In this paper, we present a Parametric Relationship Model (PRM) to identify the Security and QoS dependencies, and to elaborate on the Security and QoS tradeoff. In particular, we perform an analysis that focus on the mobile platform environment and, consequently, also considers subjective parameters such user’s experience, that is crucial for increasing the usability of new solutions in the Future Internet. The final aim of our contribution is to facilitate the development of secure and efficient services for mobile platforms.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
David Nuñez, Isaac Agudo
BlindIdM: A Privacy-Preserving Approach for Identity Management as a Service
In: International Journal of Information Security, vol. 13, pp. 199-215, 2014, ISSN: 1615-5262.
@article{nunez2014blindidm,
title = {BlindIdM: A Privacy-Preserving Approach for Identity Management as a Service},
author = {David Nu\~{n}ez and Isaac Agudo},
url = {/wp-content/papers/nunez2014blindidm.pdf},
doi = {10.1007/s10207-014-0230-4},
issn = {1615-5262},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
journal = {International Journal of Information Security},
volume = {13},
pages = {199-215},
publisher = {Springer},
abstract = {Identity management is an almost indispensable component of today’s organizations and companies, as it plays a key role in authentication and access control; however, at the same time it is widely recognized as a costly and time-consuming task. The advent of cloud computing technologies, together with the promise of flexible, cheap and efficient provision of services, has provided the opportunity to externalize such a common process, shaping what has been called Identity Management as a Service (IDaaS). Nevertheless, as in the case of other cloud-based services, IDaaS brings with it great concerns regarding security and privacy, such as the loss of control over the outsourced data. In this paper we analyze these concerns and propose BlindIdM, a model for privacy-preserving IDaaS with a focus on data privacy protection. In particular, we describe how a SAML-based system can be augmented to employ proxy re-encryption techniques for achieving data con
dentiality with respect to the cloud provider, while preserving the ability to supply the identity service. This is an innovative contribution to both the privacy and identity management landscapes.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Carmen Fernandez-Gago, Isaac Agudo, Javier Lopez
Building Trust from Context Similarity Measures
In: Computer Standards & Interfaces, Special Issue on Security in Information Systems, vol. 36, pp. 792-800, 2014, ISSN: 0920-5489.
@article{CSI13,
title = {Building Trust from Context Similarity Measures},
author = {Carmen Fernandez-Gago and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/CSI13.pdf},
doi = {10.1016/j.csi.2013.12.012},
issn = {0920-5489},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
journal = {Computer Standards \& Interfaces, Special Issue on Security in Information Systems},
volume = {36},
pages = {792-800},
publisher = {Elsevier},
abstract = {Trust is an essential feature of any system where entities have to collaborate among them. Trust can assist entities making decisions about what is the best entity for establishing a certain collaboration. It would be desirable to simulate behaviour of users as in social environments where they tend to establish relationships or to trust users who have common interests or share some of their opinions, i.e., users who are similar to them to some extent. Thus, in this paper we first introduce the concept of context similarity among entities and from it we derive a similarity network which can be seen as a graph. Based on this similarity network we dene a trust model that allows us also to establish trust along a path of entities. A possible applications of our model are proximity-based trust establishment. We validate our model in this scenario.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
Diagnosis Mechanism for Accurate Monitoring in Critical Infrastructure Protection
In: Computer Standards & Interfaces, vol. 36, pp. 501-512, 2014, ISSN: 0920-5489.
@article{alcaraz2013a,
title = {Diagnosis Mechanism for Accurate Monitoring in Critical Infrastructure Protection},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/alcaraz2013a.pdf},
doi = {10.1016/j.csi.2013.10.002},
issn = {0920-5489},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
journal = {Computer Standards \& Interfaces},
volume = {36},
pages = {501-512},
publisher = {Elsevier},
abstract = {Situational awareness for critical infrastructure protection, such as for energy control systems, has become a topic of interest in recent years. Despite attempts to address this area of research, more progress is still necessary to find attractive solutions that help bring about prevention and response at all times from anywhere and at any time. Given this need, we therefore propose in this paper, a smart mechanism able to offer a wide-area situational awareness with the ability to: (i) Control the real state of the observed infrastructure, (ii) respond to emergency situations and (iii) assess the degree of ccuracy of the entire control system. To address these aspects, the mechanism is based on a hierarchical configuration of industrial sensors for control, the ISA100.11a standard for the prioritization and alarm management, and the F-Measure technique to study the level of accuracy of a sensor inside a neighbourhood. As proof of the functionality and feasibility of the mechanism for critical contexts, a software application implemented in nesC and Java is also presented in this paper.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
WASAM: A Dynamic Wide-Area Situational Awareness Model for Critical Domains in Smart Grids
In: Future Generation Computer Systems, vol. 30, pp. 146-154, 2014, ISSN: 0167-739X.
@article{alcaraz2013b,
title = {WASAM: A Dynamic Wide-Area Situational Awareness Model for Critical Domains in Smart Grids},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/alcaraz2013b.pdf},
doi = {10.1016/j.future.2013.06.030},
issn = {0167-739X},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
journal = {Future Generation Computer Systems},
volume = {30},
pages = {146-154},
publisher = {Elsevier},
abstract = {Control from anywhere and at anytime is nowadays a matter of paramount importance in critical systems. This is the case of the Smart Grid and its domains which should be monitored through intelligent and dynamic mechanisms able to anticipate, detect and respond before disruptions arise within the system. Given this fact and its importance for social welfare and the economy, a model for wide-area situational awareness is proposed in this paper. The model is based on a set of current technologies such as the wireless sensor networks, the ISA100.11a standard and cloud-computing together with a set of high-level functional services. These services include global and local support for prevention through a simple forecast scheme, detection of anomalies in the observation tasks, response to incidents, tests of accuracy and maintenance, as well as recovery of states and control in crisis situations.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ruben Rios, Jose A. Onieva, Javier Lopez
Covert Communications through Network Configuration Messages
In: Computers & Security, vol. 39, Part A, pp. 34 – 46, 2013, ISSN: 0167-4048.
@article{rios2013a,
title = {Covert Communications through Network Configuration Messages},
author = {Ruben Rios and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/rios2013a.pdf},
doi = {10.1016/j.cose.2013.03.004},
issn = {0167-4048},
year = {2013},
date = {2013-11-01},
urldate = {2013-11-01},
journal = {Computers \& Security},
volume = {39, Part A},
pages = {34 - 46},
publisher = {Elsevier},
abstract = {Covert channels are a form of hidden communication that may violate the integrity of systems. Since their birth in Multi-Level Security systems in the early 70’s they have evolved considerably, such that new solutions have appeared for computer networks mainly due to vague protocols specifications. In this paper we concentrate on short-range covert channels and analyze the opportunities of concealing data in various extensively used protocols today. From this analysis we observe several features that can be effectively exploited for subliminal data transmission in the Dynamic Host Configuration Protocol (DHCP). The result is a proof-of-concept implementation, HIDE_DHCP, which integrates three different covert channels each of which accommodate to different stealthiness and capacity requirements. Finally, we provide a theoretical and experimental analysis of this tool in terms of its reliability, capacity, and detectability.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
A Framework for Enabling Trust Requirements in Social Cloud Applications
In: Requirements Engineering, vol. 18, pp. 321-341, 2013, ISSN: 0947-3602.
@article{moyano2013re,
title = {A Framework for Enabling Trust Requirements in Social Cloud Applications},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/moyano2013re.pdf},
doi = {10.1007/s00766-013-0171-x},
issn = {0947-3602},
year = {2013},
date = {2013-11-01},
urldate = {2013-11-01},
journal = {Requirements Engineering},
volume = {18},
pages = {321-341},
publisher = {Springer London},
abstract = {Cloud applications entail the provision of a huge amount of heterogeneous, geographically-distributed resources managed and shared by many different stakeholders who often do not know each other beforehand. This raises numerous security concerns that, if not addressed carefully, might hinder the adoption of this promising computational model. Appropriately dealing with these threats gains special relevance in the social cloud context, where computational resources are provided by the users themselves. We argue that taking trust and reputation requirements into account can leverage security in these scenarios by incorporating the notions of trust relationships and reputation into them. For this reason, we propose a development framework onto which developers can implement trust-aware social cloud applications. Developers can also adapt the framework in order to accommodate their application-specific needs.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Isaac Agudo, Ruben Rios, Javier Lopez
A Privacy-Aware Continuous Authentication Scheme for Proximity-Based Access Control
In: Computers & Security, vol. 39 (B), pp. 117-126, 2013, ISSN: 0167-4048.
@article{agudo2013,
title = {A Privacy-Aware Continuous Authentication Scheme for Proximity-Based Access Control},
author = {Isaac Agudo and Ruben Rios and Javier Lopez},
url = {/wp-content/papers/agudo2013.pdf},
doi = {10.1016/j.cose.2013.05.004},
issn = {0167-4048},
year = {2013},
date = {2013-11-01},
urldate = {2013-11-01},
journal = {Computers \& Security},
volume = {39 (B)},
pages = {117-126},
publisher = {Elsevier},
abstract = {Continuous authentication is mainly associated with the use of biometrics to guarantee that a resource is being accessed by the same user throughout the usage period. Wireless devices can also serve as a supporting technology for continuous authentication or even as a complete alternative to biometrics when accessing proximity-based services. In this paper we present the implementation of a secure, non-invasive continuous authentication scheme supported by the use of Wearable Wireless Devices (WWD), which allow users to gain access to proximity-based services while preserving their privacy. Additionally we devise an improved scheme that circumvents some of the limitations of our implementation.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Cristina Alcaraz, Rodrigo Roman
Smart Control of Operational Threats in Control Substations
In: Computers & Security, vol. 38, pp. 14-27, 2013, ISSN: 0167-4048.
@article{1770,
title = {Smart Control of Operational Threats in Control Substations},
author = {Javier Lopez and Cristina Alcaraz and Rodrigo Roman},
url = {/wp-content/papers/1770.pdf
http://www.sciencedirect.com/science/article/pii/S0167404813000588},
doi = {10.1016/j.cose.2013.03.013},
issn = {0167-4048},
year = {2013},
date = {2013-10-01},
urldate = {2013-10-01},
journal = {Computers \& Security},
volume = {38},
pages = {14-27},
publisher = {Elsevier},
abstract = {Any deliberate or unsuitable operational action in control tasks of critical infrastructures, such as energy generation, transmission and distribution systems that comprise sub-domains of a Smart Grid, could have a significant impact on the digital economy: without energy, the digital economy cannot live. In addition, the vast majority of these types of critical systems are configured in isolated locations where their control depends on the ability of a few, supposedly trustworthy, human operators. However, this assumption of reliabilty is not always true. Malicious human operators (criminal insiders) might take advantage of these situations to intentionally manipulate the critical nature of the underlying infrastructure. These criminal actions could be not attending to emergency events, inadequately responding to incidents or trying to alter the normal behaviour of the system with malicious actions. For this reason, in this paper we propose a smart response mechanism that controls human operators’ operational threats at all times. Moreover, the design of this mechanism allows the system to be able to not only evaluate by itself, the situation of a particular scenario but also to take control when areas are totally unprotected and/or isolated. The response mechanism, which is based on Industrial Wireless Sensor Networks (IWSNs) for the constant monitoring of observed critical infrastructures, on reputation for controlling human operators’ actions, and on the ISA100.11a standard for alarm management, has been implemented and simulated to evaluate its feasibility for critical contexts.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Pablo Najera, Rodrigo Roman, Javier Lopez
User-centric secure integration of personal RFID tags and sensor networks
In: Security and Communication Networks, vol. 6, pp. 1177–1197, 2013, ISSN: 1939-0114.
@article{najerascn12,
title = {User-centric secure integration of personal RFID tags and sensor networks},
author = {Pablo Najera and Rodrigo Roman and Javier Lopez},
doi = {10.1002/sec.684},
issn = {1939-0114},
year = {2013},
date = {2013-10-01},
urldate = {2013-10-01},
journal = {Security and Communication Networks},
volume = {6},
pages = {1177\textendash1197},
publisher = {Wiley-Blackwell},
abstract = {A personal network (PN) should enable the collaboration of user’s devices and services in a flexible, self-organizing and friendly manner. For such purpose, the PN must securely accommodate heterogeneous technologies with uneven computational and communication resources. In particular, personal RFID tags can enable seamless recognition of user’s context, provide user authentication and enable novel services enhancing the quality and quantity of data handled by the PN. However, the highly constrained features of common RFID tags and their passive role in the network highlights the need of an adequate secure communication model with personal tags which enables their participation as a member of the PN. In this paper, we present our concept of PN, with special emphasis on the role of RFID and sensor networks, and define a secure architecture for PNs including methods for the secure access to context-aware technologies from both local PN members and the Internet of Things. The PN architecture is designed to support differentiated security mechanisms to maximize the level of security for each type of personal device. Furthermore, we analyze which security solutions available in the literature can be adapted for our architecture, as well as the challenges and security mechanisms still necessary in the secure integration of personal tags.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Rodrigo Roman, Jianying Zhou, Javier Lopez
On the features and challenges of security and privacy in distributed internet of things
In: Computer Networks, vol. 57, pp. 2266–2279, 2013, ISSN: 1389-1286.
@article{roman2013iot,
title = {On the features and challenges of security and privacy in distributed internet of things},
author = {Rodrigo Roman and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/roman2013iot.pdf
http://www.sciencedirect.com/science/article/pii/S1389128613000054},
doi = {10.1016/j.comnet.2012.12.018},
issn = {1389-1286},
year = {2013},
date = {2013-07-01},
urldate = {2013-07-01},
journal = {Computer Networks},
volume = {57},
pages = {2266\textendash2279},
publisher = {Elsevier},
abstract = {In the Internet of Things, services can be provisioned using centralized architectures, where central entities acquire, process, and provide information. Alternatively, distributed architectures, where entities at the edge of the network exchange information and collaborate with each other in a dynamic way, can also be used. In order to understand the applicability and viability of this distributed approach, it is necessary to know its advantages and disadvantages \textendash not only in terms of features but also in terms of security and privacy challenges. The purpose of this paper is to show that the distributed approach has various challenges that need to be solved, but also various interesting properties and strengths.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose A. Montenegro, Michael J. Fischer, Javier Lopez, Rene Peralta
Secure sealed-bid online auctions using discreet cryptographic proofs
In: Mathematical and Computer Modelling, vol. 57, pp. 2583–2595, 2013, ISSN: 0895-7177.
@article{MFLR13,
title = {Secure sealed-bid online auctions using discreet cryptographic proofs},
author = {Jose A. Montenegro and Michael J. Fischer and Javier Lopez and Rene Peralta},
url = {/wp-content/papers/MFLR13.pdf},
doi = {10.1016/j.mcm.2011.07.027},
issn = {0895-7177},
year = {2013},
date = {2013-06-01},
urldate = {2013-06-01},
journal = {Mathematical and Computer Modelling},
volume = {57},
pages = {2583\textendash2595},
publisher = {Elsevier},
abstract = {This work describes the design and implementation of an auction system using secure multiparty computation techniques. Our aim is to produce a system that is practical under actual field constraints on computation, memory, and communication. The underlying protocol is privacy-preserving, that is, the winning bid is determined without information about the losing bids leaking to either the auctioneer or other bidders. Practical implementation of the protocol is feasible using circuit-based cryptographic proofs along with additively homomorphic bit commitment. Moreover, we propose the development of a emphProof Certificate standard. These certificates convey sufficient information to recreate the cryptographic proofs and verify them offline.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ruben Rios, Javier Lopez
(Un)Suitability of Anonymous Communication Systems to WSN
In: IEEE Systems Journal, vol. 7, no. 2, pp. 298 – 310, 2013, ISSN: 1932-8184.
@article{Rios2012a,
title = {(Un)Suitability of Anonymous Communication Systems to WSN},
author = {Ruben Rios and Javier Lopez},
url = {/wp-content/papers/Rios2012a.pdf},
doi = {10.1109/JSYST.2012.2221956},
issn = {1932-8184},
year = {2013},
date = {2013-06-01},
urldate = {2013-06-01},
journal = {IEEE Systems Journal},
volume = {7},
number = {2},
pages = {298 - 310},
publisher = {IEEE Systems Council},
abstract = {Anonymous communication systems have been extensively studied by the research community to prevent the disclosure of sensitive information from the analysis of individuals’ traffic patterns. Many remarkable solutions have been developed in this area, most of which have proven to be effective in the protection of user privacy against different types of attacks. Recently, the privacy preservation problem has also been considered in the realm of wireless sensor networks (WSNs) due to their imminent adoption in real-world scenarios. A special challenge that arises from the analysis of the flow of sensor nodes’ communications is the location privacy problem. In this work we concentrate on analyzing the suitability of traditional anonymous communication systems originally designed for the Internet to the original scenario of sensor networks. The results show that, in most cases, traditional solutions do not provide the adequate protection means for the particular problem of location privacy, while other solutions are too resource-consuming for the restricted capabilities of sensor nodes.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ana Nieto, Javier Lopez
Analysis and Taxonomy of Security/QoS tradeoff solutions for the Future Internet
In: Security and Communication Networks (SCN) Journal, vol. 7, pp. 2778-2803, 2013, ISSN: 1939-0114.
@article{nietoscn13,
title = {Analysis and Taxonomy of Security/QoS tradeoff solutions for the Future Internet},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/nietoscn13.pdf
http://onlinelibrary.wiley.com/doi/10.1002/sec.809/abstract?deniedAccessCustomisedMessage=\&userIsAuthenticated=false},
doi = {10.1002/sec.809},
issn = {1939-0114},
year = {2013},
date = {2013-01-01},
urldate = {2013-01-01},
journal = {Security and Communication Networks (SCN) Journal},
volume = {7},
pages = {2778-2803},
publisher = {Wiley-Blackwell},
abstract = {Motivated by the growing convergence of diverse types of networks and the rise of concepts such as Future Internet (FI), in this paper we analyse the coexistence of security mechanisms and Quality of Service (QoS) mechanisms in resourceconstrained networks, that are relevant types of networks within the FI environment. More precisely, we analyse the current state of the research on security and QoS in the integration of Wireless Sensor Networks (WSNs), Mobile Ad-Hoc Networks (MANETs) and cellular networks. Furthermore, we propose a taxonomy to identify similarities among these technologies, as well as the requirements for network interconnection. As a result, we define a dependency-based model for the analysis of Security and QoS tradeoff, and also define a high-level integration architecture for networks in the FI setting. The final goal is to provide a critical point of view that allows to assess whether such an integration of networks can be both secure and efficient.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Sherali Zeadally
Critical Control System Protection in the 21st Century: Threats and Solutions
In: IEEE Computer, vol. 46, no. 10, pp. 74 – 83, 2013, ISSN: 0018-9162.
@article{1762,
title = {Critical Control System Protection in the 21st Century: Threats and Solutions},
author = {Cristina Alcaraz and Sherali Zeadally},
doi = {10.1109/MC.2013.69},
issn = {0018-9162},
year = {2013},
date = {2013-00-01},
urldate = {2013-00-01},
journal = {IEEE Computer},
volume = {46},
number = {10},
pages = {74 - 83},
publisher = {IEEE Computer Society},
abstract = {Information systems, networks, and technologies have become an integral part of modern critical control systems that manage many of today\&$#$x2019;s critical infrastructures. The continuous operation, maintenance, and protection of critical infrastructures have become a high national priority for governments around the world because our society heavily depends on them for most of our daily activities (travel, power usage, banking transactions, telecommunications, etc) and safety. It is therefore critical that these infrastructures have to be protected from potential accidental incidents or cyberattacks. We present the fundamental architectural components of critical control systems which manage most critical infrastructures. We identify some of the vulnerabilities and threats to modern critical control systems followed by protection solutions that can be deployed to mitigate attacks exploiting these vulnerabilities.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Rodrigo Roman, Pablo Najera, Javier Lopez
Security of Industrial Sensor Network-based Remote Substations in the context of the Internet of Things
In: Ad Hoc Networks, vol. 11, pp. 1091–1104, 2013, ISSN: 1570-8705.
@article{1752,
title = {Security of Industrial Sensor Network-based Remote Substations in the context of the Internet of Things},
author = {Cristina Alcaraz and Rodrigo Roman and Pablo Najera and Javier Lopez},
url = {/wp-content/papers/1752.pdf},
doi = {10.1016/j.adhoc.2012.12.001},
issn = {1570-8705},
year = {2013},
date = {2013-00-01},
urldate = {2013-00-01},
journal = {Ad Hoc Networks},
volume = {11},
pages = {1091\textendash1104},
publisher = {Elsevier},
abstract = {The main objective of remote substations is to provide the central system with sensitive information from critical infrastructures, such as generation, distribution or transmission power systems. Wireless sensor networks have been recently applied in this particular context due to their attractive services and inherent benefits, such as simplicity, reliability and cost savings. However, as the number of control and data acquisition systems that use the Internet infrastructure to connect to substations increases, it is necessary to consider what connectivity model the sensor infrastructure should follow: either completely isolated from the Internet or integrated with it as part of the Internet of Things paradigm. This paper therefore addresses this question by providing a thorough analysis of both security requirements and infrastructural requirements corresponding to all those TCP/IP integration strategies that can be applicable to networks with constrained computational resources.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
Wide-Area Situational Awareness for Critical Infrastructure Protection
In: IEEE Computer, vol. 46, no. 4, pp. 30-37, 2013, ISSN: 0018-9162.
@article{1761,
title = {Wide-Area Situational Awareness for Critical Infrastructure Protection},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1761.pdf
http://doi.ieeecomputersociety.org/10.1109/MC.2013.72},
doi = {10.1109/MC.2013.72},
issn = {0018-9162},
year = {2013},
date = {2013-00-01},
urldate = {2013-00-01},
journal = {IEEE Computer},
volume = {46},
number = {4},
pages = {30-37},
publisher = {IEEE Computer Society},
abstract = {Combining a wide-area situational awareness (WASA) methodological framework with a set of requirements for awareness construction can help in the development and commissioning of future WASA cyberdefense solutions},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez, Rodrigo Roman, Hsiao-Hwa Chen
Selecting key management schemes for WSN applications
In: Computers & Security, vol. 31, no. 38, pp. 956–966, 2012, ISSN: 0167-4048.
@article{AlcarazR2012,
title = {Selecting key management schemes for WSN applications},
author = {Cristina Alcaraz and Javier Lopez and Rodrigo Roman and Hsiao-Hwa Chen},
url = {/wp-content/papers/AlcarazR2012.pdf
http://www.sciencedirect.com/science/article/pii/S0167404812001034},
doi = {10.1016/j.cose.2012.07.002},
issn = {0167-4048},
year = {2012},
date = {2012-11-01},
urldate = {2012-11-01},
journal = {Computers \& Security},
volume = {31},
number = {38},
pages = {956\textendash966},
publisher = {Elsevier},
abstract = {Key management in wireless sensor networks (WSN) is an active research topic. Due to the fact that a large number of key management schemes (KMS) have been proposed in the literature, it is not easy for a sensor network designer to know exactly which KMS best fits in a particular WSN application. In this article, we offer a comprehensive review on how the application requirements and the properties of various key management schemes influence each other. Based on this review, we show that the KMS plays a critical role in determining the security performance of a WSN network with given application requirements. We also develop a method that allows the network designers to select the most suitable KMS for a specific WSN network setting. In addition, the article also addresses the issues on the current state-of-the-art research on the KMS for homogeneous (i.e. non-hierarchical) networks to provide solutions for establishing link-layer keys in various WSN applications and scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
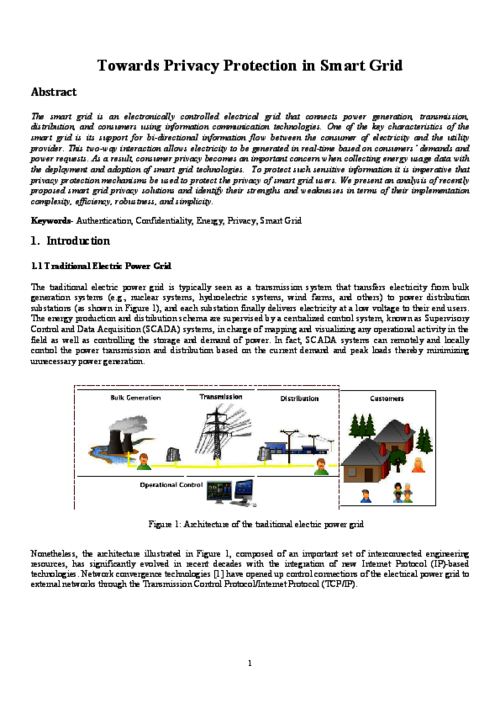
Sherali Zeadally, Al-Sakib Khan Pathan, Cristina Alcaraz, Mohamad Badra
Towards Privacy Protection in Smart Grid
In: Wireless Personal Communications, vol. 73, pp. 23-50, 2012, ISSN: 0929-6212.
@article{1750,
title = {Towards Privacy Protection in Smart Grid},
author = {Sherali Zeadally and Al-Sakib Khan Pathan and Cristina Alcaraz and Mohamad Badra},
url = {/wp-content/papers/1750.pdf},
doi = {10.1007/s11277-012-0939-1},
issn = {0929-6212},
year = {2012},
date = {2012-11-01},
urldate = {2012-11-01},
journal = {Wireless Personal Communications},
volume = {73},
pages = {23-50},
publisher = {Springer},
abstract = {The smart grid is an electronically controlled electrical grid that connects power generation, transmission, distribution, and consumers using information communication technologies. One of the key characteristics of the smart grid is its support for bi-directional information flow between the consumer of electricity and the utility provider. This two-way interaction allows electricity to be generated in real-time based on consumers’ demands and power requests. As a result, consumer privacy becomes an important concern when collecting energy usage data with the deployment and adoption of smart grid technologies. To protect such sensitive information it is imperative that privacy protection mechanisms be used to protect the privacy of smart grid users. We present an analysis of recently proposed smart grid privacy solutions and identify their strengths and weaknesses in terms of their implementation complexity, efficiency, robustness, and simplicity.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Rodrigo Roman, Javier Lopez, Olivier Dugeon, Marc Lacoste, Pierre Plaza Tron, Marta Bel
Advanced Secure Multimedia Services for Digital Homes
In: Information Systems Frontiers, vol. 14, pp. 527-540, 2012, ISSN: 1387-3326.
@article{Roman2010a,
title = {Advanced Secure Multimedia Services for Digital Homes},
author = {Rodrigo Roman and Javier Lopez and Olivier Dugeon and Marc Lacoste and Pierre Plaza Tron and Marta Bel},
url = {/wp-content/papers/Roman2010a.pdf
http://www.springerlink.com/content/1785645v5246006u/},
doi = {10.1007/s10796-010-9258-9},
issn = {1387-3326},
year = {2012},
date = {2012-07-01},
urldate = {2012-07-01},
journal = {Information Systems Frontiers},
volume = {14},
pages = {527-540},
publisher = {Springer},
abstract = {Our society is becoming increasingly more IT-oriented, and the images and sounds that reflect our daily life are being stored mainly in a digital form. This digital personal life can be part of the home multimedia contents, and users demand access and possibly share these contents (such as photographs, videos, and music) in an ubiquitous way: from any location and with any device. The purpose of this article is twofold. First, we introduce the Feel@Home system, whose main objective is to enable the previously mentioned vision of an ubiquitous digital personal life. Second, we describe the security architecture of Feel@Home, analyzing the security and privacy requirements that identify which threats and vulnerabilities must be considered, and deriving the security building blocks that can be used to protect both IMS-based and VPN-based solutions.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

David Galindo, Rodrigo Roman, Javier Lopez
On the Energy Cost of Authenticated Key Agreement in Wireless Sensor Networks
In: Wireless Communications and Mobile Computing, vol. 12, pp. 133-143, 2012, ISSN: 1530-8669.
@article{Galindo2010,
title = {On the Energy Cost of Authenticated Key Agreement in Wireless Sensor Networks},
author = {David Galindo and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Galindo2010.pdf},
doi = {10.1002/wcm.894},
issn = {1530-8669},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
journal = {Wireless Communications and Mobile Computing},
volume = {12},
pages = {133-143},
publisher = {Wiley},
abstract = {Wireless sensors are battery-powered devices which are highly constrained in terms of computational capabilities, memory and communication bandwidth. While battery life is their main limitation, they require considerable energy to communicate data. Due to this, it turns out that the energy saving of computationally inexpensive primitives (like symmetric key cryptography (SKC)) can be nullified by the bigger amount of data they require to be sent. In this work, we study the energy cost of key agreement protocols between peers in a network using asymmetric key cryptography. Our main concern is to reduce the amount of data to be exchanged, which can be done by using special cryptographic paradigms like identity-based and self-certified cryptography. The main news is that an intensive computational primitive for resource-constrained devices, such as non-interactive identity-based authenticated key exchange, performs comparably or even better than traditional authenticated key exchange (AKE) in a variety of scenarios. Moreover, protocols based in this primitive can provide better security properties in real deployments than other simple protocols based on symmetric cryptography. Our findings illustrate to what extent the latest implementation advancements push the efficiency boundaries of public key cryptography (PKC) in wireless sensor networks (WSNs).},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Antonio Muñoz
A performance-oriented monitoring system for security properties in cloud computing applications
In: The Computer Journal, 2012, ISSN: 1460-2067.
BibTeX | Links:
@article{munoz2012,
title = {A performance-oriented monitoring system for security properties in cloud computing applications},
author = {Antonio Mu\~{n}oz},
editor = {Javier Gonz\'{a}lez},
url = {/wp-content/papers/munoz2012.pdf},
issn = {1460-2067},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
journal = {The Computer Journal},
publisher = {Oxford Academic},
address = {Reino Unido},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
Analysis of Requirements for Critical Control Systems
In: International Journal of Critical Infrastructure Protection (IJCIP), vol. 5, pp. 137–145, 2012, ISSN: 1874-5482.
@article{1730,
title = {Analysis of Requirements for Critical Control Systems},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1730.pdf
http://www.sciencedirect.com/science/article/pii/S1874548212000455},
doi = {10.1016/j.ijcip.2012.08.003},
issn = {1874-5482},
year = {2012},
date = {2012-00-01},
urldate = {2012-00-01},
journal = {International Journal of Critical Infrastructure Protection (IJCIP)},
volume = {5},
pages = {137\textendash145},
publisher = {Elsevier},
abstract = {The use of modern information and communications technologies in supervisory control and data acquisition (SCADA) systems used in the critical infrastructure has become an important topic of research. The modernization significantly enhances operational performance, but also introduces security issues and the associated risks. This paper formally analyzes how the introduction of new technologies can impact control systems and ultimately affect the performance of the critical infrastructure systems being controlled. Five control system requirements are identified with the goal of proposing new operational requirements that trade-off performance and security.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Ruben Rios, Javier Lopez
Analysis of Location Privacy Solutions in Wireless Sensor Networks
In: IET Communications, vol. 5, pp. 2518 – 2532, 2011, ISSN: 1751-8628.
@article{Rios2011a,
title = {Analysis of Location Privacy Solutions in Wireless Sensor Networks},
author = {Ruben Rios and Javier Lopez},
url = {/wp-content/papers/Rios2011a.pdf},
doi = {10.1049/iet-com.2010.0825},
issn = {1751-8628},
year = {2011},
date = {2011-11-01},
urldate = {2011-11-01},
journal = {IET Communications},
volume = {5},
pages = {2518 - 2532},
publisher = {Institution of Engineering and Technology},
abstract = {Extensive work has been done on the protection of Wireless Sensor Networks (WSNs) from the hardware to the application layer. However, only recently, the privacy preservation problem has drawn the attention of the research community because of its challenging nature. This problem is exacerbated in the domain of WSNs due to the extreme resource limitation of sensor nodes. In this paper we focus on the location privacy problem in WSNs, which allows an adversary to determine the location of nodes of interest to him. We provide a taxonomy of solutions based on the power of the adversary and the main techniques proposed by the various solutions. In addition, we describe and analyse the advantages and disadvantages of different approaches. Finally, we discuss some open challenges and future directions of research.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Carmen Fernandez-Gago, Javier Lopez
An Early Warning System based on Reputation for Energy Control Systems
In: IEEE Transactions on Smart Grid, vol. 2, no. 4, pp. 827-834, 2011, ISSN: 1949-3053.
@article{Alcaraz2011,
title = {An Early Warning System based on Reputation for Energy Control Systems},
author = {Cristina Alcaraz and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Alcaraz2011.pdf},
doi = {10.1109/TSG.2011.2161498},
issn = {1949-3053},
year = {2011},
date = {2011-11-01},
urldate = {2011-11-01},
journal = {IEEE Transactions on Smart Grid},
volume = {2},
number = {4},
pages = {827-834},
publisher = {IEEE},
abstract = {Most of energy control or SCADA (Supervisory Control and Data Acquisition) systems are very dependent on advanced technologies and on traditional security mechanisms for protecting the a system against anomalous events. Security mechanisms are not enough to be used in critical systems, since they can only detect anomalous events occurring at a certain moment in time. For this reason it becomes of paramount importance the usage of intelligent systems with capability for preventing anomalous situations and reacting against them on time. This type of systems are, for example, Early Warning Systems (EWS). In this paper, we propose an EWS based on Wireless Sensor Networks (WSNs) (under the ISA100.11a standard) and reputation for controling the network behaviour. The WSN are organized into clusters where a Cluster Head (CH) is designated. This CH will contain a Reputation Manager Module. The usability of this approach is also analyzed considering a Smart Grid scenario. keywords = Critical Information Infrastructures, Sensor Networks, Early Warning Systems, Reputation, SCADA Systems, Smart Grid.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ruben Rios, Javier Lopez
Exploiting Context-Awareness to Enhance Source-Location Privacy in Wireless Sensor Networks
In: The Computer Journal, vol. 54, pp. 1603-1615, 2011, ISSN: 0010-4620.
@article{Rios2011b,
title = {Exploiting Context-Awareness to Enhance Source-Location Privacy in Wireless Sensor Networks},
author = {Ruben Rios and Javier Lopez},
url = {/wp-content/papers/Rios2011b.pdf},
doi = {10.1093/comjnl/bxr055},
issn = {0010-4620},
year = {2011},
date = {2011-09-01},
urldate = {2011-09-01},
journal = {The Computer Journal},
volume = {54},
pages = {1603-1615},
publisher = {Oxford University Press},
abstract = {The source-location privacy problem in Wireless Sensor Networks has been traditionally tackled by the creation of random routes for every packet transmitted from the source nodes to the base station. These schemes provide a considerable protection level at a high cost in terms of message delivery time and energy consumption. This overhead is due to the fact that the data routing process is done in a blind way, without knowledge about the location of the attacker. In this work we propose the Context-Aware Location Privacy (CALP) approach, which takes advantage of the ability of sensor nodes to perceive the presence of a mobile adversary in their vicinity in order to transmit data packets in a more energy-efficient and privacy-preserving manner. In particular, we apply the concepts of CALP to the development of a shortest-path CALP routing algorithm. A permissive and a strict version of the protocol are studied for different adversarial models and the proposed schemes are evaluated through simulation experiments in terms of privacy protection and energy consumption. Finally, we present the conclusions of the paper as well as possible extensions of this work.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Rodrigo Roman, Pablo Najera, Javier Lopez
Securing the Internet of Things
In: IEEE Computer, vol. 44, no. 9, pp. 51 -58, 2011, ISSN: 0018-9162.
@article{1633,
title = {Securing the Internet of Things},
author = {Rodrigo Roman and Pablo Najera and Javier Lopez},
url = {/wp-content/papers/1633.pdf},
doi = {10.1109/MC.2011.291},
issn = {0018-9162},
year = {2011},
date = {2011-09-01},
urldate = {2011-09-01},
journal = {IEEE Computer},
volume = {44},
number = {9},
pages = {51 -58},
publisher = {IEEE},
abstract = {This paper presents security of Internet of things. In the Internet of Things vision, every physical object has a virtual component that can produce and consume services Such extreme interconnection will bring unprecedented convenience and economy, but it will also require novel approaches to ensure its safe and ethical use. The Internet and its users are already under continual attack, and a growing economy-replete with business models that undermine the Internet’s ethical use-is fully focused on exploiting the current version’s foundational weaknesses.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Javier Lopez, Jianying Zhou, Rodrigo Roman
Secure SCADA Framework for the Protection of Energy Control Systems
In: Concurrency and Computation Practice & Experience, vol. 23, no. 12, pp. 1414-1430, 2011, ISSN: 1532-0626.
@article{Alcaraz2011a,
title = {Secure SCADA Framework for the Protection of Energy Control Systems},
author = {Cristina Alcaraz and Javier Lopez and Jianying Zhou and Rodrigo Roman},
url = {/wp-content/papers/Alcaraz2011a.pdf},
doi = {10.1002/cpe.1679},
issn = {1532-0626},
year = {2011},
date = {2011-08-01},
urldate = {2011-08-01},
journal = {Concurrency and Computation Practice \& Experience},
volume = {23},
number = {12},
pages = {1414-1430},
publisher = {John Wiley \& Sons, Inc.},
abstract = {Energy distribution systems are becoming increasingly widespread in today’s society. One of the elements that is used to monitor and control these systems are the SCADA (Supervisory Control and Data Acquisition) systems. In particular, these control systems and their complexities, together with the emerging use of the Internet and wireless technologies, bring new challenges that must be carefully considered. Examples of such challenges are the particular benetextasciimacronts of the integration of those new technologies, and also the etextregisteredects they may have on the overall SCADA security. The main task of this paper is to provide a framework that shows how the integration of ditextregisterederent state-of-the-art technologies in an energy control system, such as Wireless Sensor Networks (WSNs), Mobile Ad-Hoc Networks (MANETs), and the Internet, can bring some interesting benefits such as status management and anomaly prevention, while maintaining the security of the whole system.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Cristina Alcaraz, Javier Lopez, Nicolas Sklavos
Key management systems for sensor networks in the context of the Internet of Things
In: Computers & Electrical Engineering, vol. 37, pp. 147-159, 2011, ISSN: 0045-7906.
@article{roman2011,
title = {Key management systems for sensor networks in the context of the Internet of Things},
author = {Rodrigo Roman and Cristina Alcaraz and Javier Lopez and Nicolas Sklavos},
url = {/wp-content/papers/roman2011.pdf
http://www.sciencedirect.com/science/article/B6V25-527FRSD-1/2/62661c595153993639c43b9b331d8d66},
doi = {10.1016/j.compeleceng.2011.01.009},
issn = {0045-7906},
year = {2011},
date = {2011-03-01},
urldate = {2011-03-01},
journal = {Computers \& Electrical Engineering},
volume = {37},
pages = {147-159},
publisher = {Elsevier},
abstract = {If a wireless sensor network (WSN) is to be completely integrated into the Internet as part of the Internet of Things (IoT), it is necessary to consider various security challenges, such as the creation of a secure channel between an Internet host and a sensor node. In order to create such a channel, it is necessary to provide key management mechanisms that allow two remote devices to negotiate certain security credentials (e.g. secret keys) that will be used to protect the information flow. In this paper we will analyse not only the applicability of existing mechanisms such as public key cryptography and pre-shared keys for sensor nodes in the IoT context, but also the applicability of those link-layer oriented key management systems (KMS) whose original purpose is to provide shared keys for sensor nodes belonging to the same WSN.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose L. Vivas, Isaac Agudo, Javier Lopez
A methodology for security assurance-driven system development
In: Requirements Engineering, vol. 16, no. 1, pp. 55-73, 2011, ISSN: 0947-3602.
@article{vivas2010,
title = {A methodology for security assurance-driven system development},
author = {Jose L. Vivas and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/vivas2010.pdf},
doi = {10.1007/s00766-010-0114-8},
issn = {0947-3602},
year = {2011},
date = {2011-03-01},
urldate = {2011-03-01},
journal = {Requirements Engineering},
volume = {16},
number = {1},
pages = {55-73},
publisher = {Springer},
abstract = {In this work, we introduce an assurance methodology that integrates assurance case creation with system development. It has been developed in order to provide trust and privacy assurance to the evolving European project PICOS (Privacy and Identity Management for Community Services), an international research project focused on mobile communities and community-supporting services, with special emphasis on aspects such as privacy, trust, and identity management. The leading force behind the approach is the ambition to develop a methodology for building and maintaining security cases throughout the system development life cycle in a typical system engineering effort, when much of the information relevant for assurance is produced and feedback can be provided to system developers. The first results of the application of the methodology to the development of the PICOS platform are presented.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
Towards a UML Extension of Reusable Secure Use Cases for Mobile Grid systems
In: IEICE Trans. on Information and Systems, vol. E94-D, pp. 243-254, 2011, ISSN: 0916-8532.
@article{rosado2009,
title = {Towards a UML Extension of Reusable Secure Use Cases for Mobile Grid systems},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
url = {/wp-content/papers/rosado2009.pdf},
doi = {10.1587/transinf.E94.D.243},
issn = {0916-8532},
year = {2011},
date = {2011-02-01},
urldate = {2011-02-01},
journal = {IEICE Trans. on Information and Systems},
volume = {E94-D},
pages = {243-254},
publisher = {IEICE},
abstract = {The systematic processes exactly define the development cycle and help the development team follow the same development strategies and techniques, thus allowing a continuous improvement in the quality of the developed products. Likewise, it is important that the development process used integrates security aspects from the first stages at the same level as other functional and non-functional requirements. Grid systems allow us to build very complex information systems with different and remarkable features (interoperability between multiple security domains, cross-domain authentication and authorization, dynamic, heterogeneous and limited mobile devices, etc). With the development of wireless technology and mobile devices, the Grid becomes the perfect candidate for letting mobile users make complex works that add new computational capacity to the Grid. A methodology of development for secure mobile Grid systems is being defined. One of the activities of this methodology is the requirements analysis which is based in reusable use cases. In this paper, we will present a UML-extension for security use cases and Grid use case which capture the behaviour of this kind of systems. A detailed description of all these new use cases defined in the UML extension is necessary, describing the stereotypes, tagged values, constraints and graphical notation. We show an example of how to apply and use this extension for building the diagram of use cases and incorporating common security aspects for this kind of systems. Also, we will see how the diagrams built can be reused in the construction of others diagrams saving time and effort in this task.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Javier Lopez, Pablo Najera
A Cross-layer Approach for Integrating Security Mechanisms in Sensor Networks Architectures
In: Wireless Communications and Mobile Computing, vol. 11, pp. 267-276, 2011, ISSN: 1530-8669.
@article{Roman2010,
title = {A Cross-layer Approach for Integrating Security Mechanisms in Sensor Networks Architectures},
author = {Rodrigo Roman and Javier Lopez and Pablo Najera},
url = {/wp-content/papers/Roman2010.pdf},
doi = {10.1002/wcm.1006},
issn = {1530-8669},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
journal = {Wireless Communications and Mobile Computing},
volume = {11},
pages = {267-276},
publisher = {Wiley},
abstract = {The wireless sensor networks (WSN) paradigm is especially vulnerable against external and internal attacks. Therefore, it is necessary to develop security mechanisms and protocols to protect them. These mechanisms must become an integral part of the software architecture and network stack of a sensor node. A question that remains is how to achieve this integration. In this paper we check how both academic and industrial solutions tackle this issue, and we present the concept of a transversal layer, where all the different security mechanisms could be contained. This way, all the elements of the architecture can interact with the security mechanisms, and the security mechanisms can have a holistic point of view of the whole architecture. We discuss the advantages of this approach, and also present how the transversal layer concept was applied to a real middleware architecture.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Pablo Najera, Javier Lopez
Real-time Location and Inpatient Care Systems Based on Passive RFID
In: Journal of Network and Computer Applications, vol. 34, pp. pp. 980-989, 2011, ISSN: 1084-8045.
@article{Najera2010,
title = {Real-time Location and Inpatient Care Systems Based on Passive RFID},
author = {Pablo Najera and Javier Lopez},
url = {/wp-content/papers/Najera2010.pdf
http://www.sciencedirect.com/science/article/B6WKB-5023KSB-1/2/3b970ad38b2ce768888c4eec24ea472a},
doi = {10.1016/j.jnca.2010.04.011},
issn = {1084-8045},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
journal = {Journal of Network and Computer Applications},
volume = {34},
pages = {pp. 980-989},
publisher = {Elsevier},
abstract = {RFID technology meets identification and tracking requirements in healthcare environments with potential to speed up and increase reliability of involved processes. Due to this, high expectations for this integration have emerged, but hospital and medical centers interested in adoption of RFID technology require prior knowledge on how to squeeze RFID capabilities, real expectations and current challenges. In this paper, we show our lab tested solutions in two specific healthcare scenarios. On the one hand, we analyze the case of a medical equipment tracking system for healthcare facilities enabling both real-time location and theft prevention. Worth-noting aspects such as possible EMI interferences, technology selection and management of RFID data from hospital information system are analyzed. Lab testing of system reliability based on passive UHF RFID is provided for this case. On the other hand, we analyze and provide a solution for care and control of patients in a hospital based on passive HF RFID with the result of a fully functional demonstrator. Our prototype squeezes RFID features in order to provide a backup data source from patient’s wristband. It also provides an offline working mode aiming to increase application reliability under network fail down and therefore, improving patient’s safety. Considerations regarding lessons learned and challenges faced are exposed.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Security Services Architecture for Secure Mobile Grid Systems
In: Journal of Systems Architecture, vol. 57, pp. 240-258, 2011, ISSN: 1383-7621.
@article{rosado2010d,
title = {Security Services Architecture for Secure Mobile Grid Systems},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
issn = {1383-7621},
year = {2011},
date = {2011-00-01},
urldate = {2011-00-01},
journal = {Journal of Systems Architecture},
volume = {57},
pages = {240-258},
publisher = {Elsevier},
address = {Mobile Grid, is a full inheritor of the Grid with the additional feature that it supports mobile users and resources. Security is an important aspect in Grid based systems, and it is more complex to ensure this in a mobile platform owing to the limitation},
abstract = {Mobile Grid, is a full inheritor of the Grid with the additional feature that it supports mobile users andresources. Security is an important aspect in Grid based systems, and it is more complex to ensure thisin a mobile platform owing to the limitations of resources in these devices. A Grid infrastructure that supportsthe participation of mobile nodes and incorporates security aspects will thus play a significant rolein the development of Grid computing. The idea of developing software through systematic developmentprocesses to improve software quality is not new. However, many information systems such as those ofGrid Computing are still not developed through methodologies which have been adapted to their mostdifferentiating features. The lack of adequate development methods for this kind of systems in whichsecurity is taken into account has encouraged us to build a methodology to develop them, offering adetailed guide for their analysis, design and implementation. It is important to use software V\&V techniques,according to IEEE Std. 1012 for Software Verification and Validation, to ensure that a software systemmeets the operational needs of the user. This ensures that the requirements for the system arecorrect, complete, and consistent, and that the life-cycle products correctly design and implement systemrequirements. This paper shows part of a development process that we are elaborating for the constructionof information systems based on Grid Computing, which are highly dependent on mobile devices inwhich security plays a highly important role. In the design activity of the process, we design a securityarchitecture which serves as a reference for any mobile Grid application that we wish to build since thissecurity architecture defines a complete set of security services which will be instantiated depending onthe requirements and features found in previous activities of the process. A V\&V task is also defined in thedesign activity to validate and verify both the architecture built and the traceability of the artifacts generatedin this activity. In this paper, we will present the service-oriented security architecture for MobileGrid Systems which considers all possible security services that may be required for any mobile Grid application.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
Systematic Design of Secure Mobile Grid Systems
In: Journal of Network and Computer Applications, vol. 34, pp. 1168-1183, 2011, ISSN: 1084-8045.
@article{rosado2011,
title = {Systematic Design of Secure Mobile Grid Systems},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
issn = {1084-8045},
year = {2011},
date = {2011-00-01},
urldate = {2011-00-01},
journal = {Journal of Network and Computer Applications},
volume = {34},
pages = {1168-1183},
publisher = {Elsevier},
abstract = {Grid computing has arisen as an evolution of distributed systems mainly focused on the sharing of and remote access to resources in a uniform, transparent, secure, efficient and reliable manner. It is possible to join Grid technology and mobile technology in order to create one of the most promising technologies and developments to appear in recent years, in that they enrich one another and provide new solutions that solve many of the limitations and problems found in different technologies. Security is a very important factor in Mobile Grid Computing and is also difficult to achieve owing to the open nature of wireless networks and heterogeneous and distributed environments. Success in obtaining a secure system originates in incorporating security from the first stages of the development process. It has therefore been necessary to define a development process for this kind of systems in which security is incorporated in all stages of the development and the features and particularities of the Mobile Grid systems are taken into consideration. This paper presents one of the activities of this development process, the design activity, which consists of defining and designing a security software architecture. This architecture will be built from a security architecture, defined as reference architecture, in which security services, interfaces and operations are defined with the purpose of defining a reference security architecture which covers the majority of security requirements identified in the analysis activity. The design activity will build the system architecture that will be the input artefact for the subsequent activity in the process, which is the construction activity.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose L. Vivas, Carmen Fernandez-Gago, Andres Benjumea, Javier Lopez
A security framework for a workflow-based grid development platform.
In: Computer Standards and Interfaces, vol. 32, no. 5-6, pp. 230-245, 2010, ISSN: 0920-5489.
@article{vivas2009,
title = {A security framework for a workflow-based grid development platform.},
author = {Jose L. Vivas and Carmen Fernandez-Gago and Andres Benjumea and Javier Lopez},
url = {/wp-content/papers/vivas2009.pdf},
doi = {10.1016/j.csi.2009.04.001},
issn = {0920-5489},
year = {2010},
date = {2010-10-01},
urldate = {2010-10-01},
journal = {Computer Standards and Interfaces},
volume = {32},
number = {5-6},
pages = {230-245},
publisher = {Elsevier},
abstract = {This paper describes the security framework that is to be developed for the generic grid platform created for the project GREDIA. This platform is composed of several components that need to be secured. The platform uses the OGSA standards, so that the security framework will follow GSI, the portion of Globus that implements security. Thus, we will show the security features that GSI already provides and we will outline which others need to be created or enhanced.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
Developing a Secure Mobile Grid System through a UML Extension
In: Journal of Universal Computer Science, vol. 16, no. 17, pp. 2333-2352, 2010, ISSN: 0948-695x.
@article{rofelopi,
title = {Developing a Secure Mobile Grid System through a UML Extension},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
doi = {10.3217/jucs-016-17-2333},
issn = {0948-695x},
year = {2010},
date = {2010-09-01},
urldate = {2010-09-01},
journal = {Journal of Universal Computer Science},
volume = {16},
number = {17},
pages = {2333-2352},
publisher = {Springer},
abstract = {The idea of developing software through systematic development processes toimprove software quality is not new. Nevertheless, there are still many information systemssuch as those of Grid Computing which are not developed through methodologies that areadapted to their most differentiating features. A systematic development process for Gridsystems that supports the participation of mobile nodes and incorporates security aspects intothe entire software lifecycle will thus play a significant role in the development of systemsbased on Grid computing. We are creating a development process for the construction ofinformation systems based on Grid Computing, which is highly dependent on mobile devices,in which security plays a highly important role. One of the activities in this process is that ofanalysis which is focused on ensuring that the system’s security and functional requirements areelicited, specified and modelled. In our approach, this activity is driven by use cases andsupported by the reusable repository. This obtains, builds, defines and refines the use cases ofthe secure Mobile Grid systems which represent the functional and non-functional requirementsof this kind of systems. In this paper, we present the proposed development process throughwhich we introduce the main aspects of the UML profile defined for building use case diagramsin the mobile Grid context through which it is possible to represent specific mobile Gridfeatures and security aspects, showing in detail how to build use case diagrams for a real mobile Grid application by using our UML profile, denominated as GridUCSec-Profile.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Isaac Agudo, Carmen Fernandez-Gago, Javier Lopez
A Scale Based Trust Model for Multi-Context Environments
In: Computers and Mathematics with Applications, vol. 60, pp. 209-216, 2010, ISSN: 0898-1221.
@article{Agudo2010b,
title = {A Scale Based Trust Model for Multi-Context Environments},
author = {Isaac Agudo and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Agudo2010b.pdf},
doi = {10.1016/j.camwa.2010.02.009},
issn = {0898-1221},
year = {2010},
date = {2010-07-01},
urldate = {2010-07-01},
journal = {Computers and Mathematics with Applications},
volume = {60},
pages = {209-216},
publisher = {Elsevier},
abstract = {When interactions among users of a system have to take place, for example, over the internet, establishing trust relationships among these users becomes crucial. However, the way this trust is established depends to a certain extent on the context where the interactions take place. Most of the time, trust is encoded as a numerical value that might not be very meaningful for a not very experienced user. In this paper we propose a model that takes into account the semantic and the computational sides of trust. This avoids users having to deal directly with the computational side; they instead deal with meaningful labels such as Bad or Good in a given context.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Javier Lopez
A Security Analysis for Wireless Sensor Mesh Networks in Highly Critical Systems
In: IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, vol. 40, no. 4, pp. 419-428, 2010, ISSN: 1094-6977.
@article{Alcaraz2010a,
title = {A Security Analysis for Wireless Sensor Mesh Networks in Highly Critical Systems},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Alcaraz2010a.pdf
http://ieeexplore.ieee.org/search/srchabstract.jsp?tp=\&arnumber=5443456\&queryText%253DC.+Alcaraz%2526openedRefinements%253D*%2526searchField%253DSearch+All\&fromGateway=true},
doi = {10.1109/TSMCC.2010.2045373},
issn = {1094-6977},
year = {2010},
date = {2010-07-01},
urldate = {2010-07-01},
journal = {IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews},
volume = {40},
number = {4},
pages = {419-428},
publisher = {IEEE},
abstract = {Nowadays, critical control systems are a fundamental component contributing to the overall performance of critical infrastructures in our society, most of which belong to the industrial sector. These complex systems include in their design different types of information and communication technology systems, such as wireless (mesh) sensor networks, to carry out control processes in real time. This fact has meant that several communication standards, such as Zigbee PRO, WirelessHART, and ISA100.11a, have been specified to ensure coexistence, reliability, and security in their communications. The main purpose of this paper has been to review these three standards and analyze their security. We have identified a set of threats and potential attacks in their routing protocols, and we consequently provide recommendations and countermeasures to help Industry protect its infrastructures.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
Analysis of Secure Mobile Grid Systems: A Systematic Approach
In: Information and Software Technology, vol. 52, pp. 517-536, 2010, ISSN: 0950-5849.
@article{rosado2010b,
title = {Analysis of Secure Mobile Grid Systems: A Systematic Approach},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
doi = {10.1016/j.infsof.2010.01.002},
issn = {0950-5849},
year = {2010},
date = {2010-05-01},
urldate = {2010-05-01},
journal = {Information and Software Technology},
volume = {52},
pages = {517-536},
publisher = {Elsevier},
abstract = {Developing software through systematic processes is becoming more and more important due to the growing complexity of software development. It is important that the development process used integrates security aspects from the first stages at the same level as other functional and non-functional requirements. Systems which are based on Grid Computing are a kind of systems that have clear differentiating features in which security is a highly important aspect. The Mobile Grid, which is relevant to both Grid and Mobile Computing, is a full inheritor of the Grid with the additional feature that it supports mobile users and resources. A development methodology for Secure Mobile Grid Systems is proposed in which the security aspects are considered from the first stages of the life-cycle and in which the mobile Grid technological environment is always present in each activity. This paper presents the analysis activity, in which the requirements (focusing on the grid, mobile and security requirements) of the system are specified and which is driven by reusable use cases through which the requirements and needs of these systems can be defined. These use cases have been defined through a UML-extension for security use cases and Grid use cases which capture the behaviour of this kind of systems. The analysis activity has been applied to a real case.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Rodrigo Roman, Pablo Najera
Los Desafíos de Seguridad en la Internet de los Objetos
In: Revista SIC, vol. 88, pp. 66-73, 2010, ISSN: 1136-0623.
@article{jlopez09,
title = {Los Desaf\'{i}os de Seguridad en la Internet de los Objetos},
author = {Javier Lopez and Rodrigo Roman and Pablo Najera},
url = {/wp-content/papers/jlopez09.pdf},
issn = {1136-0623},
year = {2010},
date = {2010-02-01},
urldate = {2010-02-01},
journal = {Revista SIC},
volume = {88},
pages = {66-73},
publisher = {Ediciones CODA},
abstract = {El paradigma de la Internet de los Objetos, donde todos aquellos objetos f\'{i}sicos que nos rodean tendr\'{a}n la capacidad de generar y consumir informaci\'{o}n en el \'{a}mbito de un mundo virtual, se encuentra cada vez m\'{a}s cerca. Es ahora un buen momento para llamar la atenci\'{o}n sobre sus principales desaf\'{i}os de seguridad, tanto desde un punto de vista global como asociados a sus elementos m\'{a}s importantes (la tecnolog\'{i}a RFID y las redes de sensores). As\'{i}, este paradigma puede ser plenamente comprendido y protegido, evolucionando hacia uno de los nuevos pilares del futuro.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Ying Qiu, Jianying Zhou, Joonsang Baek, Javier Lopez
Authentication and Key Establishment in Dynamic Wireless Sensor Networks
In: Sensors, vol. 10, pp. 3718-3731, 2010, ISSN: 1424-8220.
BibTeX | Links:
@article{1694,
title = {Authentication and Key Establishment in Dynamic Wireless Sensor Networks},
author = {Ying Qiu and Jianying Zhou and Joonsang Baek and Javier Lopez},
url = {/wp-content/papers/1694.pdf},
issn = {1424-8220},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {Sensors},
volume = {10},
pages = {3718-3731},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Josep L. Ferrer-Gomila, Jose A. Onieva, Magdalena Payeras, Javier Lopez
Certified electronic mail: Properties revisited
In: Computers & Security, vol. 29, no. 2, pp. 167 – 179, 2010, ISSN: 0167-4048.
@article{FerrerGomilla2009,
title = {Certified electronic mail: Properties revisited},
author = {Josep L. Ferrer-Gomila and Jose A. Onieva and Magdalena Payeras and Javier Lopez},
url = {/wp-content/papers/FerrerGomilla2009.pdf
http://www.sciencedirect.com/science/article/B6V8G-4WR19XR-1/2/eda89f747b077fc68fa061f213ddf6d5},
doi = {10.1016/j.cose.2009.06.009},
issn = {0167-4048},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {Computers \& Security},
volume = {29},
number = {2},
pages = {167 - 179},
abstract = {Certified electronic mail is an added value to traditional electronic mail. In the definition of this service some differences arise: a message in exchange for a reception proof, a message and a non repudiation of origin token in exchange for a reception proof, etc. It greatly depends on whether we want to emulate the courier service or improve the service in the electronic world. If the definition of the service seems conflictive, the definition of the properties and requirements of a good certified electronic mail protocol is even more difficult. The more consensuated features are the need of a fair exchange and the existence of a trusted third party (TTP). Each author chooses the properties that considers the most important, and many times the list is conditioned by the proposal. Which kind of TTP must be used? Must it be verifiable, transparent and/or stateless? Which features must the communication channel fulfil? Which temporal requirements must be established? What kind of fairness is desired? What efficiency level is required? Are confidentiality or transferability of the proofs compulsory properties? In this paper we collect the definitions, properties and requirements related with certified electronic mail. The aim of the paper is to create a clearer situation and analyze how some properties cannot be achieved simultaneously. Each protocol designer will have to decide which properties are the most important in the environment in where the service is to be deployed.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Isaac Agudo
Digital Identity and Identity Management Technologies
In: UPGRADE – The European Journal of the Informatics Professional, vol. 2010, pp. 6 – 12, 2010, ISSN: 1684-5285.
@article{1589,
title = {Digital Identity and Identity Management Technologies},
author = {Isaac Agudo},
url = {/wp-content/papers/1589.pdf
http://www.cepis.org/upgrade/files/issue-1-2010-agudo.ruiz.pdf},
issn = {1684-5285},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {UPGRADE - The European Journal of the Informatics Professional},
volume = {2010},
pages = {6 - 12},
publisher = {CEPIS},
abstract = {There are many technologies for identity management available in the form of open specifications, open source tools and commercial applications. Currently, there are some competing standards for identity management. At the beginning SAML was the only viable choice with a higher enough acceptance level. Recently, another technology called WS-Federation has also gain some attention from the community. Although this technology is not as mature as SAML, it modular design gives it some advantages over SAML. It this work we mainly focus on the WS-Federation and the family of specifications that surround it.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jordi Forne, M. Francisca Hinarejos, Andres Marin, Florina Almenarez, Javier Lopez, Jose A. Montenegro, Marc Lacoste, Daniel Diaz
Pervasive Authentication and Authorization Infrastructures for Mobile Users
In: Computer and Security, vol. 29, pp. 501-514, 2010, ISSN: 0167-4048.
@article{JordiForne2009,
title = {Pervasive Authentication and Authorization Infrastructures for Mobile Users},
author = {Jordi Forne and M. Francisca Hinarejos and Andres Marin and Florina Almenarez and Javier Lopez and Jose A. Montenegro and Marc Lacoste and Daniel Diaz},
url = {/wp-content/papers/JordiForne2009.pdf},
doi = {10.1016/j.cose.2009.09.001},
issn = {0167-4048},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {Computer and Security},
volume = {29},
pages = {501-514},
publisher = {elsevier},
abstract = {Network and device heterogeneity, nomadic mobility, intermittent connectivity and, more generally, extremely dynamic operating conditions, are major challenges in the design of security infrastructures for pervasive computing. Yet, in a ubiquitous computing environment, limitations of traditional solutions for authentication and authorization can be overcome with a pervasive public key infrastructure (pervasive-PKI). This choice allows the validation of credentials of users roaming between heterogeneous networks, even when global connectivity is lost and some services are temporarily unreachable. Proof-of-concept implementations and testbed validation results demonstrate that strong security can be achieved for users and applications through the combination of traditional PKI services with a number of enhancements like: (i) dynamic and collaborative trust model, (ii) use of attribute certificates for privilege management, and (iii) modular architecture enabling nomadic mobility and enhanced with reconfiguration capabilities.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Rodrigo Roman, Isaac Agudo, Carmen Fernandez-Gago
Trust Management Systems for Wireless Sensor Networks: Best practices
In: Computer Communications, vol. 33, no. 9, pp. 0140-3664, 2010, ISSN: 0140-3664.
@article{JavierLopezMunoz2010,
title = {Trust Management Systems for Wireless Sensor Networks: Best practices},
author = {Javier Lopez and Rodrigo Roman and Isaac Agudo and Carmen Fernandez-Gago},
url = {/wp-content/papers/JavierLopezMunoz2010.pdf},
doi = {10.1016/j.comcom.2010.02.006},
issn = {0140-3664},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {Computer Communications},
volume = {33},
number = {9},
pages = {0140-3664},
publisher = {Elsevier},
abstract = {Wireless sensor networks (WSNs) have been proven a useful technology for perceiving information about the physical world and as a consequence has been used in many applications such as measurement of temperature, radiation, flow of liquids, etc. The nature of this kind of technology, and also their vulnerabilities to attacks make the security tools required for them to be considered in a special way. The decision making in a WSN is essential for carrying out certain tasks as it aids sensors establish collaborations. In order to assist this process, trust management systems could play a relevant role. In this paper, we list the best practices that we consider are essential for developing a good trust management system for WSN and make an analysis of the state of the art related to these practices.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Isaac Agudo, Carmen Fernandez-Gago, Javier Lopez
Concurrent access control for multi-user and multi-processor systems based on trust relationships
In: Concurrency and Computation: Practice and Experience, vol. 21, pp. 1389-1403, 2009, ISSN: 1532-0626.
@article{Agudo2009,
title = {Concurrent access control for multi-user and multi-processor systems based on trust relationships},
author = {Isaac Agudo and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Agudo2009.pdf},
doi = {10.1002/cpe.1430},
issn = {1532-0626},
year = {2009},
date = {2009-07-01},
urldate = {2009-07-01},
journal = {Concurrency and Computation: Practice and Experience},
volume = {21},
pages = {1389-1403},
publisher = {John Wiley \& Sons},
abstract = {Concurrent access control is an old problem in many fields in Computer Science. It has been solved in many languages and systems, using mechanisms like monitors or priority queues. Nowadays computers implement multi-core capabilities. This means that they are virtually capable of execution of processes in parallel. This requires new techniques and open new issues in the field of concurrent access control. Moreover, most operating systems are multi-user; thus, we have to focus on a multi-processor multi-user scenario. Trust becomes a paramount aspect when building distributed applications; the same applies on a lower scale in modern computers. We propose the use of a trust graph that keeps record of the trust relationships of the system and helps in deciding on concurrent access requests. The information encoded in the graph will be used both in order to decide on the access requests and to order granted requests in terms of their associated trust level.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Javier Lopez
Integrating Wireless Sensor Networks and the Internet: A Security Analysis
In: Internet Research, vol. 19, no. 2, pp. 246-259, 2009, ISSN: 1066-2243.
@article{roman2009a,
title = {Integrating Wireless Sensor Networks and the Internet: A Security Analysis},
author = {Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/roman2009a.pdf},
doi = {10.1108/10662240910952373},
issn = {1066-2243},
year = {2009},
date = {2009-03-01},
urldate = {2009-03-01},
journal = {Internet Research},
volume = {19},
number = {2},
pages = {246-259},
publisher = {Emerald},
abstract = {Purpose: This paper aims to analyze the security issues that arise when integrating wireless sensor networks (WSN) and the internet. Also, it seeks to review whether existing technology mechanisms are suitable and can be applied in this context.
Design/methodology/approach: The paper considers the possible approaches that can be used to connect a WSN with the internet, and analyzes the security of their interactions.
Findings: By providing the services of the network through a front-end proxy, a sensor network and the internet can interact securely. There are other challenges to be solved if the sensor nodes are integrated into the internet infrastructure, although there exists interesting advances on his matter.
Research limitations and implications: The complete integration of sensor networks and the internet still remains as an open issue.
Practical implications: With the current state of the art, it is possible to develop a secure sensor network that can provide its services to internet hosts with certain security properties.
Originality/value: The paper studies the interactions between sensor networks and the internet from the point of view of security. It identifies both solutions and research challenges.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Design/methodology/approach: The paper considers the possible approaches that can be used to connect a WSN with the internet, and analyzes the security of their interactions.
Findings: By providing the services of the network through a front-end proxy, a sensor network and the internet can interact securely. There are other challenges to be solved if the sensor nodes are integrated into the internet infrastructure, although there exists interesting advances on his matter.
Research limitations and implications: The complete integration of sensor networks and the internet still remains as an open issue.
Practical implications: With the current state of the art, it is possible to develop a secure sensor network that can provide its services to internet hosts with certain security properties.
Originality/value: The paper studies the interactions between sensor networks and the internet from the point of view of security. It identifies both solutions and research challenges.

David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Obtaining Security Requirements for a Mobile Grid System
In: International Journal of Grid and High Performance Computing, vol. 1, pp. 1-17, 2009, ISSN: 1938-0259.
@article{rosado2009c,
title = {Obtaining Security Requirements for a Mobile Grid System},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
url = {/wp-content/papers/rosado2009c.pdf},
doi = {10.4018/IJGHPC},
issn = {1938-0259},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
journal = {International Journal of Grid and High Performance Computing},
volume = {1},
pages = {1-17},
publisher = {IGI-Global},
abstract = {Mobile Grid includes the characteristics of the Grid systems together with the peculiarities of Mobile Computing, withthe additional feature of supporting mobile users and resources ina seamless, transparent, secure and efficient way. Security ofthese systems, due to their distributed and open nature, isconsidered a topic of great interest. We are elaborating amethodology of development to build secure mobile grid systemsconsidering security on all life cycle. In this paper we present thepractical results applying our methodology to a real case,specifically we apply the part of security requirements analysis toobtain and identify security requirements of a specific applicationfollowing a set of tasks defined for helping us in the definition,identification and specification of the security requirements onour case study. The methodology will help us to build a securegrid application in a systematic and iterative way.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Mildrey Carbonell, Jose Maria Sierra, Javier Lopez
Secure multiparty payment with an intermediary entity
In: Computers and Security, vol. 28, no. 5, pp. 289-300, 2009, ISSN: 0167-4048.
BibTeX | Links:
@article{1705,
title = {Secure multiparty payment with an intermediary entity},
author = {Mildrey Carbonell and Jose Maria Sierra and Javier Lopez},
url = {/wp-content/papers/1705.pdf},
issn = {0167-4048},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
journal = {Computers and Security},
volume = {28},
number = {5},
pages = {289-300},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Pablo Najera, Francisco Moyano, Javier Lopez
Security Mechanisms and Access Control Infrastructure for e-Passports and General Purpose e-Documents
In: Journal of Universal Computer Science, vol. 15, pp. 970-991, 2009, ISSN: 0948-695X.
@article{Najera2009,
title = {Security Mechanisms and Access Control Infrastructure for e-Passports and General Purpose e-Documents},
author = {Pablo Najera and Francisco Moyano and Javier Lopez},
url = {/wp-content/papers/Najera2009.pdf
http://www.jucs.org/jucs_15_5/security_mechanisms_and_access},
doi = {10.3217/jucs-015-05-0970},
issn = {0948-695X},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
journal = {Journal of Universal Computer Science},
volume = {15},
pages = {970-991},
abstract = {Traditional paper documents are not likely to disappear in the near future as they are present everywhere in daily life, however, paper-based documentation lacks the link with the digital world for agile and automated processing. At the same time it is prone to cloning, alteration and counterfeiting attacks. E-passport defined by ICAO and implemented in 45 countries is the most relevant case of hybrid documentation (i.e. paper format with electronic capabilities) to date, but, as the advantages of hybrid documentation are recognized more and more will undoubtedly appear. In this paper, we present the concept and security requirements of general-use e-documents, analyze the most comprehensive security solution (i.e. ePassport security mechanisms) and its suitability for general-purpose e-documentation. Finally, we propose alternatives for the weakest and less suitable protocol from ePassports: the BAC (Basic Access Control). In particular, an appropriate key management infrastructure for access control to document memory is discussed in conjunction with a prototype implementation.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Gerardo Fernandez, Rodrigo Roman, Angel Balastegui, Javier Lopez
Gestión segura de redes SCADA
In: Nuevas tendencias en gestión de redes, Novática, no. 196, pp. 20-25, 2008, ISSN: 0211-2124.
@article{Alcaraz2008a,
title = {Gesti\'{o}n segura de redes SCADA},
author = {Cristina Alcaraz and Gerardo Fernandez and Rodrigo Roman and Angel Balastegui and Javier Lopez},
url = {/wp-content/papers/Alcaraz2008a.pdf
http://www.ati.es/novatica/indice.html$#$196},
issn = {0211-2124},
year = {2008},
date = {2008-12-01},
urldate = {2008-12-01},
journal = {Nuevas tendencias en gesti\'{o}n de redes, Nov\'{a}tica},
number = {196},
pages = {20-25},
publisher = {CEPIS},
abstract = {En el momento que se introduce en el mercado nuevas tecnolog\'{i}as basadas en entornos distribuidos comienzan a surgir en paralelo nuevos problemas de seguridad en los sistemas SCADA (Supervisory Control and Data Acquisition), los cuales monitorizan y gestionan otras infraestructuras de gran complejidad y escala. Un fallo o una interrupci\'{o}n en uno de sus componentes podr\'{i}a suponer un impacto negativo sobre la funcionalidad de otras infraestructuras, por lo que se hace necesario realizar frecuentes an\'{a}lisis de seguridad para as\'{i} mantener actualizado el conocimiento y proveer recomendaciones y/o soluciones para mitigar o evitar futuras ocurrencias, garantizando una gesti\'{o}n de red fiable y siempre disponible.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Jose A. Onieva, Jianying Zhou, Javier Lopez
Multi-Party Nonrepudiation: A survey
In: ACM Comput. Surveys, vol. 41, no. 1, pp. 5, 2008, ISSN: 0360-0300.
@article{Onieva2008a,
title = {Multi-Party Nonrepudiation: A survey},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/JoseA.Onieva2008a.pdf},
doi = {https://doi.org/10.1145/1456650.1456655},
issn = {0360-0300},
year = {2008},
date = {2008-12-01},
urldate = {2008-12-01},
journal = {ACM Comput. Surveys},
volume = {41},
number = {1},
pages = {5},
abstract = {Nonrepudiation is a security service that plays an important role in many Internet applications. Traditional two-party nonrepudiation has been studied intensively in the literature. This survey focuses on multiparty scenarios and provides a comprehensive overview. It starts with a brief introduction of fundamental issues on nonrepudiation, including the types of nonrepudiation service and cryptographic evidence, the roles of trusted third-party, nonrepudiation phases and requirements, and the status of standardization. Then it describes the general multiparty nonrepudiation problem, and analyzes state-of-the-art mechanisms. After this, it presents in more detail the 1-N multiparty nonrepudiation solutions for distribution of different messages to multiple recipients. Finally, it discusses advanced solutions for two typical multiparty nonrepudiation applications, namely, multiparty certified email and multiparty contract signing.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Cristina Alcaraz, Gerardo Fernandez, Rodrigo Roman, Angel Balastegui, Javier Lopez
Secure Management of SCADA Networks
In: Novatica, New Trends in Network Management, vol. 9, no. 6, pp. 22-28, 2008, ISSN: 1684-5285.
@article{Alcaraz2008b,
title = {Secure Management of SCADA Networks},
author = {Cristina Alcaraz and Gerardo Fernandez and Rodrigo Roman and Angel Balastegui and Javier Lopez},
url = {/wp-content/papers/Alcaraz2008b.pdf
http://www.upgrade-cepis.org/issues/2008/6/up9-6Alcaraz.pdf},
issn = {1684-5285},
year = {2008},
date = {2008-12-01},
urldate = {2008-12-01},
journal = {Novatica, New Trends in Network Management},
volume = {9},
number = {6},
pages = {22-28},
publisher = {Cepis UPGRADE},
abstract = {When a Supervisory Control and Data Acquisition (SCADA) system monitors and manages other complex infrastructures through the use of distributed technologies, it becomes a critical infrastructure by itself: A failure or disruption in any of its components could implicate a serious impact on the performance of the other infrastructures. The connection with other systems makes a SCADA system more vulnerable against attacks, generating new security problems. As a result, it is essential to perform diverse security analysis frequently in order to keep an updated knowledge and to provide recommendations and/or solutions to mitigate or avoid anomalous events. This will facilitate the existence of a suitable, reliable, and available control network.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Isaac Agudo, Javier Lopez, Jose A. Montenegro
Enabling Attribute Delegation in Ubiquitous Environments
In: Mobile Networks and Applications, vol. 13, no. 3-4, pp. 398-410, 2008, ISSN: 1383-469X.
@article{Agudo2008d,
title = {Enabling Attribute Delegation in Ubiquitous Environments},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/Agudo2008d.pdf},
doi = {10.1007/s11036-008-0062-4},
issn = {1383-469X},
year = {2008},
date = {2008-08-01},
urldate = {2008-08-01},
journal = {Mobile Networks and Applications},
volume = {13},
number = {3-4},
pages = {398-410},
publisher = {Springer},
abstract = {When delegation is implemented using the attribute certificates in a Privilege Management Infrastructure (PMI), it is possible to reach a considerable level of distributed functionality. However, the approach is not flexible enough for the requirements of ubiquitous environments. The PMI can become a too complex solution for devices such as smartphones and PDAs, where resources are limited. In this work we present an approach to solve the previous limitations by defining a second class of attributes, called domain attributes, which are managed directly by users and are not right under the scope of the PMI, thus providing a light solution for constrained devices. However, we relate the two classes of attributes are related by defining a simple ontology. While domain attribute credentials are defined using SAML notation, global attributes are defined using X.509 certificates. For this reason, we additionally introduce XSAML so that both kinds of credentials are integrated. We also introduce the concept of Attribute Federation which is responsible for supporting domain attributes and the corresponding ontology.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Javier Lopez, Stefanos Gritzalis
Situation Awareness Mechanisms for Wireless Sensor Networks
In: IEEE Communications Magazine, vol. 46, no. 4, pp. 102-107, 2008, ISSN: 0163-6804.
@article{Roman2008a,
title = {Situation Awareness Mechanisms for Wireless Sensor Networks},
author = {Rodrigo Roman and Javier Lopez and Stefanos Gritzalis},
url = {/wp-content/papers/Roman2008a.pdf},
doi = {10.1109/MCOM.2008.4481348},
issn = {0163-6804},
year = {2008},
date = {2008-04-01},
urldate = {2008-04-01},
journal = {IEEE Communications Magazine},
volume = {46},
number = {4},
pages = {102-107},
publisher = {IEEE},
abstract = {A wireless sensor network should be able to operate for long periods of time with little or no external management. There is a requirement for this autonomy: the sensor nodes must be able to configure themselves in the presence of adverse situations. Therefore, the nodes should make use of situation awareness mechanisms to determine the existence of abnormal events in their surroundings. This work approaches the problem by considering the possible abnormal events as diseases, thus making it possible to diagnose them through their symptoms, namely, their side effects. Considering these awareness mechanisms as a foundation for high-level monitoring services, this article also shows how these mechanisms are included in the blueprint of an intrusion detection system.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Vicente Benjumea, Javier Lopez, Jose M. Troya
Anonymity Analysis in Credentials-based Systems: A Formal Framework
In: Computer Standards & Interfaces, vol. 30, no. 4, pp. 253-261, 2008, ISSN: 0920-5489.
@article{VicenteBenjumea2008,
title = {Anonymity Analysis in Credentials-based Systems: A Formal Framework},
author = {Vicente Benjumea and Javier Lopez and Jose M. Troya},
url = {/wp-content/papers/VicenteBenjumea2008.pdf},
issn = {0920-5489},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
journal = {Computer Standards \& Interfaces},
volume = {30},
number = {4},
pages = {253-261},
publisher = {Elsevier},
abstract = {Anonymity has been formalized and some metrics have been defined in the scope of anonymizing communication channels. In this paper, such formalization has been extended to cope with anonymity in those scenarios where users must anonymously prove that they own certain privileges to perform remote transactions. In these types of scenarios, the authorization policy states the privileges required to perform a given remote transaction. The paper presents a framework to analyze the actual degree of anonymity reached in a given transaction and allows its comparison with an ideal anonymity degree as defined by the authorization policy, providinga tool to model, design and analyze anonymous systems in different scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose A. Onieva, Javier Lopez, Rodrigo Roman, Jianying Zhou, Stefanos Gritzalis
Integration of non-repudiation services in mobile DRM scenarios
In: Telecommunications Systems, vol. 35, pp. 161-176, 2007, ISSN: 1572-9451.
@article{Onieva2007a,
title = {Integration of non-repudiation services in mobile DRM scenarios},
author = {Jose A. Onieva and Javier Lopez and Rodrigo Roman and Jianying Zhou and Stefanos Gritzalis},
url = {/wp-content/papers/JoseA.Onieva2007a.pdf},
doi = {10.1007/s11235-007-9050-4},
issn = {1572-9451},
year = {2007},
date = {2007-09-01},
urldate = {2007-09-01},
journal = {Telecommunications Systems},
volume = {35},
pages = {161-176},
abstract = {In any kind of electronic transaction, it is extremely important to assure that any of the parties involved can not deny their participation in the information exchange. This security property, which is called non-repudiation, becomes more important in Digital Rights Management (DRM) scenarios, where a consumer can freely access to certain contents but needs to obtain the proper Right Object (RO) from a vendor in order to process it. Any breach in this process could result on financial loss for any peer, thus it is necessary to provide a service that allows the creation of trusted evidence. Unfortunately, non-repudiation services has not been included so far in DRM specifications due to practical issues and the type of content distributed. In this paper we analyze how to allow the integration of non-repudiation services to a DRM framework, providing a set of protocols that allows the right objects acquisition to be undeniable, alongside with a proof-of-concept implementation and a validation process.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Cristina Alcaraz, Javier Lopez
A Survey of Cryptographic Primitives and Implementations for Hardware-Constrained Sensor Network Nodes
In: Mobile Networks and Applications, vol. 12, no. 4, pp. 231-244, 2007, ISSN: 1383-469X.
@article{Roman2007,
title = {A Survey of Cryptographic Primitives and Implementations for Hardware-Constrained Sensor Network Nodes},
author = {Rodrigo Roman and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Roman2007.pdf
http://www.springerlink.com/content/3785k818327456gq/},
doi = {10.1007/s11036-007-0024-2},
issn = {1383-469X},
year = {2007},
date = {2007-08-01},
urldate = {2007-08-01},
journal = {Mobile Networks and Applications},
volume = {12},
number = {4},
pages = {231-244},
publisher = {Springer},
abstract = {In a wireless sensor network environment, a sensor node is extremely constrained in terms of hardware due to factors such as maximizing lifetime and minimizing physical size and overall cost. Nevertheless, these nodes must be able to run cryptographic operations based on primitives such as hash functions, symmetric encryption and public key cryptography in order to allow the creation of secure services. Our objective in this paper is to survey how the existing research-based and commercial-based sensor nodes are suitable for this purpose, analyzing how the hardware can influence the provision of the primitives and how software implementations tackles the task of implementing instances of those primitives. As a result, it will be possible to evaluate the influence of provision of security in the protocols and applications/scenarios where sensors can be used.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Isaac Agudo, Jose A. Montenegro
On the deployment of a real scalable delegation service
In: Information Security Technical Report, vol. 12, no. 3, pp. 139-147, 2007, ISSN: 1363-4127.
@article{JavierLopez2007,
title = {On the deployment of a real scalable delegation service},
author = {Javier Lopez and Isaac Agudo and Jose A. Montenegro},
url = {/wp-content/papers/JavierLopez2007.pdf},
doi = {10.1016/j.istr.2007.05.008},
issn = {1363-4127},
year = {2007},
date = {2007-06-01},
urldate = {2007-06-01},
journal = {Information Security Technical Report},
volume = {12},
number = {3},
pages = {139-147},
publisher = {Elsevier},
abstract = {This paper explains the evolution of the concept of delegation since its first references in the context of distributed authorization to the actual use as a fundamental part of a privilege management architecture. The work reviews some of the earliest contributions that pointed out the relevance of delegation when dealing with distributed authorization, in particular we comment on PolicyMaker and Keynote, and also on SDSI/SPKI. Then, we elaborate on Federation as a particular case of delegation, and remark the importance given to federation by the industry. Finally, the paper discusses about privilege management infrastructures, introducing a new mechanism to extend their functionality using advanced delegation services.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jianying Zhou, Wee-Yung Chin, Rodrigo Roman, Javier Lopez
An Effective Multi-layered Defense Framework Against Spam
In: Information Security Technical Report, vol. 12, no. 3, pp. 179-185, 2007, ISSN: 1363-4127.
@article{Zhou2007,
title = {An Effective Multi-layered Defense Framework Against Spam},
author = {Jianying Zhou and Wee-Yung Chin and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Zhou2007.pdf
http://www.sciencedirect.com/science/article/B6VJC-4NS2GR9-1/2/d542b6d1b936f796cad17284a6edbc69},
doi = {10.1016/j.istr.2007.05.007},
issn = {1363-4127},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {Information Security Technical Report},
volume = {12},
number = {3},
pages = {179-185},
publisher = {Elsevier},
abstract = {Spam is a big problem for email users. The battle between spamming and anti-spamming technologies has been going on for many years. Though many advanced anti-spamming technologies are progressing significantly, spam is still able to bombard many email users. The problem worsens when some anti-spamming methods unintentionally filtered legitimate emails instead! In this paper, we first review existing anti-spam technologies, then propose a layered defense framework using a combination of anti-spamming methods. Under this framework, the server-level defense is targeted for common spam while the client-level defense further filters specific spam for individual users. This layered structure improves on filtering accuracy and yet reduces the number of false positives. A sub-system using our pre-challenge method is implemented as an add-on in Microsoft Outlook 2002. In addition, we extend our client-based pre-challenge method to a domain-based solution thus further reducing the individual email users’ overheads.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Cristina Alcaraz, Javier Lopez
The Role of Wireless Sensor Networks in the Area of Critical Information Infrastructure
In: Information Security Technical Report, vol. 12, no. 1, pp. 24-31, 2007, ISSN: 1363-4127.
@article{Roman2007a,
title = {The Role of Wireless Sensor Networks in the Area of Critical Information Infrastructure},
author = {Rodrigo Roman and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Roman2007a.pdf
http://www.sciencedirect.com/science/article/B6VJC-4N6NK24-1/2/b1462973afe70af30a10b955d96ccbb6},
doi = {10.1016/j.istr.2007.02.003},
issn = {1363-4127},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {Information Security Technical Report},
volume = {12},
number = {1},
pages = {24-31},
publisher = {Elsevier},
abstract = {Critical Infrastructures, such as energy, banking, and transport, are an essential pillar to the well-being of the national and international economy, security and quality of life. These infrastructures are dependent on a spectrum of highly interconnected information infrastructures for their smooth, reliable and continuous operation. The field of protecting such Critical Information Infrastructures, or CIIP, faces numerous challenges, such as managing the secure interaction between peers, assuring the resilience and robustness of the overall system, and deploying warning and alert systems, amongst others. In this tapestry of CIIP, Wireless Sensor Networks can be used as an invaluable tool due to their intelligent distributed control capabilities, alongside with their capability to work under severe conditions. In this paper, we justify why Wireless Sensor Networks technology is suitable for providing security for these scenarios, describing both their advantages and research issues and their role in the overall scheme of protecting the Critical Information Infrastructures.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Clare Dixon, Carmen Fernandez-Gago, Michael Fisher, Wiebe Hoek
Temporal Logics of Knowledge and their Applications in Security
In: First Workshop in Information and Computer Security (ICS’06), vol. 186, pp. 27-42, 2007, ISSN: 1571-0661.
@article{Dix07,
title = {Temporal Logics of Knowledge and their Applications in Security},
author = {Clare Dixon and Carmen Fernandez-Gago and Michael Fisher and Wiebe Hoek},
url = {/wp-content/papers/Dix07.pdf},
issn = {1571-0661},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {First Workshop in Information and Computer Security (ICS’06)},
volume = {186},
pages = {27-42},
publisher = {Elsevier},
address = {Timisoara, Romania},
abstract = {Temporal logics of knowledge are useful for reasoning about situations where the knowledge of an agent or component is important, and where change in this knowledge may occur over time. Here we investigate the application of temporal logics of knowledge to the specification and verification of security protocols. We show how typical assumptions relating to authentication protocols can be specified. We consider verification methods for these logics, in particular, focusing on proofs using clausal resolution. Finally we present experiences from using a resolution based theorem prover applied to security protocols specified in temporal logics of knowledge.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Vicente Benjumea, Javier Lopez, Jose M. Troya
Anonymous Attribute Certificates based on Traceable Signatures
In: Internet Research, vol. 16, no. 2, pp. 120-139, 2006, ISSN: 1066-2243.
@article{VicenteBenjumea2006a,
title = {Anonymous Attribute Certificates based on Traceable Signatures},
author = {Vicente Benjumea and Javier Lopez and Jose M. Troya},
url = {/wp-content/papers/VicenteBenjumea2006a.pdf},
issn = {1066-2243},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {Internet Research},
volume = {16},
number = {2},
pages = {120-139},
publisher = {Elsevier},
address = {Anonymous attribute certificates were introduced by Benjumea et. al (Benjumea, 2004) in order to integrate anonymity capabilities in the standardized X.509 attribute certificates. That solution was based on the use of fair-blind signatures, but did not ex},
abstract = {In Benjumea et. al (Benjumea, 2004) we introduced the concept of anonymousattribute certificates in order to integrate anonymity capabilities in the standardizedX.509 attribute certificates. That solution was based on the use of fair-blind signatures(Stadler, 1995), but did not explore further possibilities of constructing similar datastructures based on more advanced signature schemes. In this new work, we propose anew type of anonymous attribute certificates that is based on the more recently proposedtraceable signature scheme (Kiayias, 2004a), providing a new anonymous authorizationsolution with interesting features that were not covered in the aforementioned scheme.Thus, this new solution allows users to make use of their attribute certificates in ananonymous way, but under certain circumstances it allows to disclose the users’ identities,trace the transactions carried out by any specific user, or revoke any anonymousattribute certificate. An additional contribution of this work is that it pays special attentionto the preservation of the unlinkability property between transactions, makingimpossible the creation of anonymous user profiles.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Jianying Zhou, Javier Lopez
An Anti-spam Scheme Using Pre-challenges
In: Computer Communications, vol. 29, no. 15, pp. 2739-2749, 2006, ISSN: 0140-3664.
@article{Roman2006a,
title = {An Anti-spam Scheme Using Pre-challenges},
author = {Rodrigo Roman and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Roman2006a.pdf
http://www.sciencedirect.com/science/article/B6TYP-4HYM1T7-1/2/53871c3a06d8e1c9439deda17a05ed2d},
doi = {10.1016/j.comcom.2005.10.037},
issn = {0140-3664},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {Computer Communications},
volume = {29},
number = {15},
pages = {2739-2749},
publisher = {Elsevier},
abstract = {Unsolicited Commercial Email, or Spam, is nowadays an increasingly serious problem to email users. A number of anti-spam schemes have been proposed in the literature and some of them have been deployed in email systems, but the problem has yet been well addressed. One of those schemes is challenge-response, in which a challenge, ranging from a simple mathematical problem to a hard-AI problem, is imposed on an email sender in order to forbid machine-based spam reaching receivers’ mailboxes. However, such a scheme introduces new problems for the users, e.g., delay of service and denial of service. In this paper, we introduce the pre-challenge scheme, which is based on the challenge-response mechanism and takes advantage of some features of email systems. It assumes each user has a challenge that is defined by the user himself/herself and associated with his/her email address, in such a way that an email sender can simultaneously retrieve a new receiver’s email address and challenge before sending an email in the first contact. Some new mechanisms are employed in our scheme to reach a good balance between security against spam and convenience to normal email users. Our scheme can be also used for protecting other messaging systems, like Instant Messaging and Blog comments.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Vicente Benjumea, Javier Lopez, Jose M. Troya
Specification of a Framework for the Anonymous Use of Privileges
In: Telematics and Informatics, vol. 23, no. 3, pp. 179-195, 2006, ISSN: 0736-5853.
@article{VicenteBenjumea2006,
title = {Specification of a Framework for the Anonymous Use of Privileges},
author = {Vicente Benjumea and Javier Lopez and Jose M. Troya},
url = {/wp-content/papers/VicenteBenjumea2006.pdf},
issn = {0736-5853},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {Telematics and Informatics},
volume = {23},
number = {3},
pages = {179-195},
publisher = {Elsevier},
abstract = {In this paper we have defined an open framework to support open distributed applications where anonymous transactions based on user privileges play an important role. The goal of the framework is to provide a basis to the application level, and is presented from an open and general perspective where many different implementation schemes can fit. Moreover, we have presented a set of requirements that implementation schemes must fulfill to conform a fully anonymous privilege system, which guarantees to supported applications that anonymity will be preserved in remote transactions. Finally, we present an application scenario using the services provided by the framework in order to better show the possibilities of what this type of systems offers.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez
Unleashing Public-Key Cryptography in Wireless Sensor Networks
In: Journal of Computer Security, vol. 14, no. 5, pp. 469-482, 2006, ISSN: 0926-227X.
@article{1710,
title = {Unleashing Public-Key Cryptography in Wireless Sensor Networks},
author = {Javier Lopez},
issn = {0926-227X},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {Journal of Computer Security},
volume = {14},
number = {5},
pages = {469-482},
publisher = {IOS Press},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Isaac Agudo, Javier Lopez, Jose A. Montenegro
A Graphical Delegation Solution for X.509 Attribute Certificates
In: ERCIM News, no. 63, pp. 33-34, 2005, ISSN: 0926-4981.
BibTeX | Links:
@article{IsaacAgudo2005,
title = {A Graphical Delegation Solution for X.509 Attribute Certificates},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/IsaacAgudo2005.pdf},
issn = {0926-4981},
year = {2005},
date = {2005-10-01},
urldate = {2005-10-01},
journal = {ERCIM News},
number = {63},
pages = {33-34},
publisher = {ERCIM},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Jose A. Montenegro, Jose L. Vivas, Eiji Okamoto, Ed Dawson
Specification and Design of Advanced Authentication and Authorization Services
In: Computer Standards & Interfaces, vol. 27, no. 5, pp. 467-478, 2005, ISSN: 0920-5489.
@article{javierlopez2005c,
title = {Specification and Design of Advanced Authentication and Authorization Services},
author = {Javier Lopez and Jose A. Montenegro and Jose L. Vivas and Eiji Okamoto and Ed Dawson},
url = {/wp-content/papers/javierlopez2005c.pdf},
doi = {10.1016/j.csi.2005.01.005},
issn = {0920-5489},
year = {2005},
date = {2005-06-01},
urldate = {2005-06-01},
journal = {Computer Standards \& Interfaces},
volume = {27},
number = {5},
pages = {467-478},
publisher = {Elsevier},
abstract = {A challenging task in security engineering concerns the specification and integration of security with other requirements at the top level of requirements engineering. Empirical studies show that it is common at the business process level that customers and end users are able to express their security needs. Among the security needs of Internet applications, authentication and authorization services are outstanding and, sometimes, privacy becomes a parallel requirement. In this paper, we introduce a methodology for the specification of security requirements and use a case study to apply our solution. We further detail the resulting system after extending it with an Authentication and Authorization Infrastructure.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Rodrigo Roman, Jianying Zhou, Javier Lopez
Casual Virtual Private Network
In: International Journal of Computer Systems Science & Engineering, vol. 3, pp. 185-192, 2005, ISSN: 0267-6192.
@article{Roman2005f,
title = {Casual Virtual Private Network},
author = {Rodrigo Roman and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Roman2005f.pdf},
issn = {0267-6192},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {International Journal of Computer Systems Science \& Engineering},
volume = {3},
pages = {185-192},
publisher = {CRL Publishing},
abstract = {Virtual Private Networks (VPNs) provide a cost-effective way for securing communications using public and insecure networks like the Internet. The main purpose of a VPN is to securely and transparently connect two or more remote networks to form virtually a single network, using centralized security policies for better management and protection. However, in certain scenarios, users may not require such a transparent access to the resources within their networks, but only want temporary secure access to internal services based on their own demands. We call the network architecture with such a feature as Casual VPN. In this paper, we present the notion of Casual VPN, and explain why traditional VPN architectures and protocols are unable to offer Casual VPN services. We also propose and define the operation of a particular Casual VPN architecture, C-VPN, which additionally allows the management of TCP and UDP-based protocols.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Carmen Fernandez-Gago, Ullrich Hustadt, Clare Dixon, Michael Fisher, Boris Konev
First-Order Temporal Verification in Practice
In: Journal of Automated Reasoning, vol. 34, pp. 295-321, 2005, ISSN: 0168-7433.
@article{Fernandez2005,
title = {First-Order Temporal Verification in Practice},
author = {Carmen Fernandez-Gago and Ullrich Hustadt and Clare Dixon and Michael Fisher and Boris Konev},
url = {/wp-content/papers/Fernandez2005.pdf},
doi = {10.1007/s10817-005-7354-1},
issn = {0168-7433},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {Journal of Automated Reasoning},
volume = {34},
pages = {295-321},
publisher = {Springer},
abstract = {First-order temporal logic, the extension of first-order logic with operators dealing with time, is a powerful and expressive formalism with many potential applications. This expressive logic can be viewed as a framework in which to investigate problems specified in other logics. The monodic fragment of first-order temporal logic is a useful fragment that possesses good computational properties such as completeness and sometimes even decidability. Temporal logics of knowledge are useful for dealing with situations where the knowledge of agents in a system is involved. In this paper we present a translation from temporal logics of knowledge into the monodic fragment of first-order temporal logic. We can then use a theorem prover for monodic first-order temporal logic to prove properties of the translated formulas. This allows problems specified in temporal logics of knowledge to be verified automatically without needing a specialized theorem prover for temporal logics of knowledge. We present the translation, its correctness, and examples of its use.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Alan Winfield, Jin Sa, Carmen Fernandez-Gago, Clare Dixon, Michael Fisher
On the Formal Specification of Emergent Behaviours of Swarm Robotics Systems
In: International Journal of Advanced Robotics Systems, vol. 2, pp. 363-371, 2005, ISSN: 1729-8806.
@article{Winfield2005,
title = {On the Formal Specification of Emergent Behaviours of Swarm Robotics Systems},
author = {Alan Winfield and Jin Sa and Carmen Fernandez-Gago and Clare Dixon and Michael Fisher},
url = {/wp-content/papers/Winfield2005.pdf},
doi = {10.5772/5769},
issn = {1729-8806},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {International Journal of Advanced Robotics Systems},
volume = {2},
pages = {363-371},
publisher = {SAGE Publishing},
abstract = {It is a characteristic of swarm robotics that specifying overall emergent swarm behaviours in terms of the low-level behaviours of individual robots is very difficult. Yet if swarm robotics is to make the transition from the laboratory to real-world engineering realisation we need such specifications. This paper explores the use of temporal logic to formally specify, and possibly also prove, the emergent behaviours of a robotic swarm. The paper makes use of a simplified wireless connected swarm as a case study with which to illustrate the approach. Such a formal approach could be an important step toward a disciplined design methodology for swarm robotics.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Mariemma I. Yague, Antonio Mana, Javier Lopez
A Metadata-based Access Control Model for Web Services
In: Internet Research Journal, vol. 15, no. 1, pp. 99-116, 2005.
BibTeX | Links:
@article{1707,
title = {A Metadata-based Access Control Model for Web Services},
author = {Mariemma I. Yague and Antonio Mana and Javier Lopez},
url = {/wp-content/papers/1707.pdf},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {Internet Research Journal},
volume = {15},
number = {1},
pages = {99-116},
publisher = {Emerald},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jianying Zhou, Jose A. Onieva, Javier Lopez
Optimised Multi-Party Certified Email Protocols
In: Information Management & Computer Security Journal, vol. 13, no. 5, pp. 350-366, 2005, ISSN: 0968- 5227.
@article{Zhou2005,
title = {Optimised Multi-Party Certified Email Protocols},
author = {Jianying Zhou and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/Zhou2005.pdf},
doi = {10.1108/09685220510627250},
issn = {0968- 5227},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {Information Management \& Computer Security Journal},
volume = {13},
number = {5},
pages = {350-366},
abstract = {As a value-added service to deliver important data over the Internet with guaranteed receipt for each successful delivery, certified email has been discussed for years and a number of research papers appeared in the literature. But most of them deal with the two-party scenarios, i.e., there are only one sender and one recipient. In some applications, however, the same certified message may need to be sent to a set of recipients. In this paper, we presents two optimized multi-party certified email protocols. They have three major features. (1) A sender could notify multiple recipients of the same information while only those recipients who acknowledged are able to get the information. (2) Both the sender and the recipients can end a protocol run at any time without breach of fairness. (3) The exchange protocols are optimized, each of which have only three steps.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Juan J. Ortega, Jose M. Troya
Security Protocols Analysis: A SDL-based Approach
In: Computer Standards & Interfaces, vol. 27, no. 3, pp. 489-499, 2005, ISSN: 0920-5489.
@article{JavierLopez2005b,
title = {Security Protocols Analysis: A SDL-based Approach},
author = {Javier Lopez and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2005b.pdf},
issn = {0920-5489},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {Computer Standards \& Interfaces},
volume = {27},
number = {3},
pages = {489-499},
publisher = {Elsevier},
abstract = {Organizations need to develop formally analyzed systems in order to achieve well-known formal method benefits. In order to study the security of communication systems, we have developed a methodology for the application of the formal analysis techniques, commonly used in communication protocols, to the analysis of cryptographic protocols. In particular, we have extended the design and analysis phases with security properties. Our proposal uses a specification notation based on one of the most used standard requirement languages HMSC/MSC, which can be automatically translated into a generic SDL specification. The SDL system obtained can then be used for the analysis of the addressed security properties, by using an observer process schema. Besides our main goal to provide a notation for describing the formal specification of security systems, our proposal also brings additional benefits, such as the study of the possible attacks to the system, and the possibility of re-using the specifications produced to describe and analyse more complex systems.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Sokratis K. Katsikas, Javier Lopez, Guenther Pernul
Trust, Privacy and Security in Digital Business
In: International Journal of Computer Systems, Science & Engineering, vol. 20, no. 6, 2005, ISSN: 0267-6192.
@article{SokratisKatsikas2005a,
title = {Trust, Privacy and Security in Digital Business},
author = {Sokratis K. Katsikas and Javier Lopez and Guenther Pernul},
url = {/wp-content/papers/SokratisKatsikas2005a.pdf},
issn = {0267-6192},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {International Journal of Computer Systems, Science \& Engineering},
volume = {20},
number = {6},
publisher = {CRL Publishing},
abstract = {An important aspect of e-business is the area of e-commerce. According to recent surveys, one of the most severe restraining factors for the proliferation of e-commerce, as measured by the gap between predicted market value and actual development is the (lack of) security measures required to assure both businesses and customers that their business relationship and transactions will be carried out in privacy, correctly, and timely. A large number of individuals are not willing to engage in e-commerce (or are only participating at a reduced level) simply because they do not trust the e-commerce sites and the underlying information and communication technologies to be secure enough. This paper first considers privacy and security requirements for e-commerce applications; it then discusses methods and technologies that can be used to fulfil these requirements.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Rolf Oppliger, Guenther Pernul
Why Public Key Infrastructures have failed so far?
In: Internet Research, vol. 15, no. 5, pp. 544-556, 2005, ISSN: 1066-2243.
@article{JavierLopez2005,
title = {Why Public Key Infrastructures have failed so far?},
author = {Javier Lopez and Rolf Oppliger and Guenther Pernul},
url = {/wp-content/papers/JavierLopez2005.pdf},
issn = {1066-2243},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {Internet Research},
volume = {15},
number = {5},
pages = {544-556},
publisher = {Emerald},
abstract = {Since public key cryptography is a fundamental technology for electronic commerce, people have often argued that public key infrastructures and corresponding certification services are the gold-mines of the information age. Contrary to these relatively high expectations, public key infrastructures have not really taken off and many certification service providers have even gone out of business. In this paper, we overview and discuss the technical, economical, legal, and social reasons why public key infrastructures have failed so far, summarize the lessons learnt, and give our expectations about the future development of the field.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Jose A. Onieva, Jianying Zhou, Javier Lopez, Mildrey Carbonell
Agent-mediated non-repudiation protocols
In: Electronic Commerce Research and Applications, vol. 3, no. 2, pp. 152-162, 2004, ISSN: 1567-4223.
@article{Onieva2004a,
title = {Agent-mediated non-repudiation protocols},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez and Mildrey Carbonell},
url = {/wp-content/papers/Onieva2004a.pdf},
issn = {1567-4223},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {Electronic Commerce Research and Applications},
volume = {3},
number = {2},
pages = {152-162},
publisher = {Elsevier},
abstract = {Non-repudiation is a security service that provides cryptographic evidence to support the settlement of disputes in electronic commerce. In commercial transactions, an intermediary (or agent) might be involved to help transacting parties to conduct their business. Nevertheless, such an intermediary may not be fully trusted. In this paper, we propose agent-mediated non-repudiation protocols and analyze their security requirements. We first present a simple scenario with only one recipient, followed by a more complicated framework where multiple recipients are involved and collusion between them is possible. We also identify applications that could take advantage of these agent-mediated non-repudiation protocols.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Rolf Oppliger, Guenther Pernul
Authentication and Authorization Infrastructures (AAIs): A Comparative Survey
In: Computers & Security, vol. 23, no. 7, pp. 578-590, 2004, ISSN: 0167-4048.
@article{JavierLopez2004,
title = {Authentication and Authorization Infrastructures (AAIs): A Comparative Survey},
author = {Javier Lopez and Rolf Oppliger and Guenther Pernul},
url = {/wp-content/papers/JavierLopez2004.pdf},
issn = {0167-4048},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {Computers \& Security},
volume = {23},
number = {7},
pages = {578-590},
publisher = {Elsevier},
abstract = {In this article, we argue that traditional approaches for authorization and access control in computer systems (i.e., discretionary, mandatory, and role-based access controls) are not appropriate to address the requirements of networked or distributed systems, and that proper authorization and access control requires infrastructural support in one way or another. This support can be provided, for example, by an authentication and authorization infrastructure (AAI). Against this background, we overview, analyze, discuss, and put into perspective some technologies that can be used to build and operate AAIs. More specifically, we address Microsoft .NET Passport and some related activities (e.g. the Liberty Alliance Project), Kerberos-based solutions, and AAIs that are based on digital certificates and public key infrastructures (PKIs). We conclude with the observation that there is no single best approach for providing an AAI, that every approach has specific advantages and disadvantages, and that a comprehensive AAI must combine various technologies and approaches.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Antonio Mana, Javier Lopez, Juan J. Ortega, Ernesto Pimentel, Jose M. Troya
A Framework for Secure Execution of Software
In: International Journal of Information Security (IJIS), vol. 3, no. 2, pp. 99-112, 2004, ISSN: 1615-5262.
@article{AntonioMana2004,
title = {A Framework for Secure Execution of Software},
author = {Antonio Mana and Javier Lopez and Juan J. Ortega and Ernesto Pimentel and Jose M. Troya},
url = {/wp-content/papers/AntonioMana2004.pdf},
issn = {1615-5262},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {International Journal of Information Security (IJIS)},
volume = {3},
number = {2},
pages = {99-112},
publisher = {Springer},
abstract = {The protection of software applications is one of the most important problems to solve in information security because it has a crucial effect on other security issues.We can find in the literature many research initiatives that have tried to solve this problem, many of them based on the use of tamperproof hardware tokens. This type of solutions depends on two basic premises: (i) to increase the physical security by using tamperproof devices, and (ii) to increase the complexity of the analysis of the software. The first premise is reasonable. The second one is certainly related to the first one. In fact, its main goal is that the pirate user can not modify the software to bypass an operation that is crucial: checking the presence of the token. However, the experience shows that the second premise is not realistic because the analysis of the executable code is always possible. Moreover, the techniques used to obstruct the analysis process are not enough to discourage an attacker with average resources. In this paper, we review the most relevant works related to software protection, present a taxonomy of those works and, most important, we introduce a new and robust software protection scheme. This solution, called SmartProt, is based on the use of smart cards and cryptographic techniques, and its security relies only on the first of previous premises; that is, Smartprot has been designed to avoid attacks based on code analysis and software modification. The entire system is described following a lifecycle approach, explaining in detail the card setup, production, authorization, and execution phases. We also present some interesting applications of Smart- Prot as well as the protocols developed to manage licenses. Finally, we provide an analysis of its implementation details.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Jose A. Onieva, Jianying Zhou, Javier Lopez
Non-repudiation Protocols for Multiple Entities
In: Computer Communications, vol. 27, no. 16, pp. 1608-1616, 2004, ISSN: 0140-3664.
@article{Onieva2004c,
title = {Non-repudiation Protocols for Multiple Entities},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Onieva2004c.pdf},
doi = {https://doi.org/10.1016/j.comcom.2004.06.003},
issn = {0140-3664},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {Computer Communications},
volume = {27},
number = {16},
pages = {1608-1616},
abstract = {Non-repudiation is a security service that provides cryptographic evidence to support the settlement of disputes. In this paper, we introduce the state-of-the-art of non-repudiation protocols for multiple entities. We extend an existing multi-party non-repudiation (MPNR) protocol to allow an originator to send different messages to many recipients in a single transaction. We further propose an optimistic multi-party non-repudiation protocol for exchange of different messages. The performance of our protocols with enhanced functionalities is still promising in comparison with existing MPNR protocols.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Antonio Mana, Jose A. Montenegro, Juan J. Ortega
PKI Design Based on the Use of On-line Certification Authorities
In: International Journal of Information Security (IJIS), vol. 2, no. 2, pp. 91-102, 2004, ISSN: 1615-5262.
@article{JavierLopez2004b,
title = {PKI Design Based on the Use of On-line Certification Authorities},
author = {Javier Lopez and Antonio Mana and Jose A. Montenegro and Juan J. Ortega},
url = {/wp-content/papers/JavierLopez2004b.pdf},
issn = {1615-5262},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {International Journal of Information Security (IJIS)},
volume = {2},
number = {2},
pages = {91-102},
publisher = {Springer},
abstract = {Public-Key Infrastructures (PKIs) are considered the basis of the protocols and tools needed to guarantee the security demanded for new Internet applications like electronic commerce, government-citizen relationships and digital distribution. This paper introduces a new infrastructure design, Cert’eM, a key management and certification system that is based on the structure of the electronic mail service and on the principle of near-certification. Cert’eM provides secure means to identify users and distribute their public-key certificates, enhances the efficiency of revocation procedures, and avoids scalability and synchronization problems. Because we have considered the revocation problem as priority in the design process, and with a big influence in the rest of the PKI components, we have developed an alternative solution to the use of Certificate Revocation Lists (CRLs), which has become one of the strongest points in this new scheme.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Sigrid Gurgens, Javier Lopez, Rene Peralta
Analysis of E-commerce Protocols: Adapting a Traditional Technique
In: International Journal of Information Security, vol. 2, no. 1, pp. 21-36, 2003, ISSN: 1615-5262.
@article{SigridGuergens2003,
title = {Analysis of E-commerce Protocols: Adapting a Traditional Technique},
author = {Sigrid Gurgens and Javier Lopez and Rene Peralta},
url = {/wp-content/papers/SigridGuergens2003.pdf},
issn = {1615-5262},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
journal = {International Journal of Information Security},
volume = {2},
number = {1},
pages = {21-36},
publisher = {Springer},
abstract = {We present the adaptation of our model for the validation of key distribution and authentication protocols to address some of the specific needs of protocols for electronic commerce. The two models defer in both the threat scenario and in the protocol formalization. We demonstrate the suitability of our adaptation by analyzing a specific version of the Internet Billing Server protocol introduced by Carnegie MellonUniversity. Our analysis shows that, while the security properties a key distribution or authentication protocol shall provide are well understood, it is often not clear which properties an electronic commerce protocol can or shall provide. We use the automatic theorem proving software ‘‘Otter’’ developed at Argonne National Laboratories for state space exploration.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Antonio Mana, Juan J. Ortega, Jose M. Troya, Mariemma I. Yague
Integrating PMI Services in CORBA Applications
In: Computer Standards & Interfaces, vol. 25, no. 4, pp. 391-409, 2003, ISSN: 0920-5489.
@article{JavierLopez2003c,
title = {Integrating PMI Services in CORBA Applications},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega and Jose M. Troya and Mariemma I. Yague},
url = {/wp-content/papers/JavierLopez2003c.pdf},
issn = {0920-5489},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
journal = {Computer Standards \& Interfaces},
volume = {25},
number = {4},
pages = {391-409},
abstract = {Application-level access control is an important requirement in many distributed environments. For instance, in new scenarios such as e-commerce, access to resources by previously unknown users is an essential problem to be solved. The integration of Privilege Management Infrastructure (PMI) services in the access control system represents a scalable way to solve this problem. Within the CORBA standards, the Resource Access Decision (RAD) facility is a mechanism used by security-aware applications to obtain authorization decisions and to manage access decision policies. This paper presents PMI-RAD, an approach to integrate the services of an external PMI into CORBA applications using the RAD facility. In particular, the integration of the external PMI in the access control system is based on the semantic description of the PMI services. Our RAD implementation requests and verifies attribute certificates from the PMI in a transparent way for CORBA objects.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Antonio Mana, Ernesto Pimentel, Jose M. Troya, Mariemma I. Yague
A Secure Solution for Commercial Digital Libraries
In: Online Information Review Journal, vol. 27, no. 3, pp. 147-159, 2003, ISSN: 1468-4527.
BibTeX | Links:
@article{1708,
title = {A Secure Solution for Commercial Digital Libraries},
author = {Javier Lopez and Antonio Mana and Ernesto Pimentel and Jose M. Troya and Mariemma I. Yague},
url = {/wp-content/papers/1708.pdf},
issn = {1468-4527},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
journal = {Online Information Review Journal},
volume = {27},
number = {3},
pages = {147-159},
publisher = {Emerald},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Selwyn Russell, Ed Dawson, Eiji Okamoto, Javier Lopez
Virtual Certificates and Synthetic Certificates: New Paradigms for Improving Public Key Validation
In: Computer Communications, vol. 26, no. 16, pp. 1826-1838, 2003, ISSN: 0140-3664.
@article{SelwynRusell2003,
title = {Virtual Certificates and Synthetic Certificates: New Paradigms for Improving Public Key Validation},
author = {Selwyn Russell and Ed Dawson and Eiji Okamoto and Javier Lopez},
url = {/wp-content/papers/SelwynRusell2003.pdf},
issn = {0140-3664},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
journal = {Computer Communications},
volume = {26},
number = {16},
pages = {1826-1838},
publisher = {Elsevier},
abstract = {The certificate paradigm is applied recursively to obtain the public keys of a number of Certification Authorities and, accordingly, to obtain the public keys of a number of final entities. Thus, validation of the authorized public key of a party in a network transaction is commonly based on processing the certificate chain descended from a trusted root issuer, involving non-negligible time and cost. Those chains become long in communications between large organizations, which is the typical case of e-commerce and e-government applications. The process of validation of extensive chains introduces performance problems in two aspects: signature verification and revocation checking. That is, the repeated processing of long chains of certificates creates severe efficiency problems. This fact causes that most of the advantages provided by Public Key Infrastructures (PKIs) are not conveniently exploited. In this paper we analyze the scenarios in which large volumes of digitally signed transactions between commercial entities exist. These cases require of interoperation among PKIs. We show that solutions available in those scenarios still involve processing of too long chains of certificates, either at the receiving computer or by an outsourced entity. For this reason, we propose new concepts of virtual certificate and synthetic certificate for faster and less costly processing of certificate chains. In this way, communications in a certificate-based intercommunity can be highly improved. We also show how these types of certificates can be applied in practice.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez
Proyecto CASENET: Integración del Diseño y Análisis de Protocolos Segurospara el Comerio-e
In: Revista SIC: Seguridad en Informática y Comunicaciones, vol. 49, pp. 1-2, 2002, ISSN: 1136-06.
@article{1711,
title = {Proyecto CASENET: Integraci\'{o}n del Dise\~{n}o y An\'{a}lisis de Protocolos Segurospara el Comerio-e},
author = {Javier Lopez},
issn = {1136-06},
year = {2002},
date = {2002-01-01},
urldate = {2002-01-01},
journal = {Revista SIC: Seguridad en Inform\'{a}tica y Comunicaciones},
volume = {49},
pages = {1-2},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Javier Lopez, Antonio Mana, Pedro Merino, Jose M. Troya
The Role of Smartcards in Practial Information Security
In: ERCIM News, vol. 49, pp. 38-40, 2002, ISSN: 0926-4981.
@article{JavierLopez2002d,
title = {The Role of Smartcards in Practial Information Security},
author = {Javier Lopez and Antonio Mana and Pedro Merino and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002d.pdf},
issn = {0926-4981},
year = {2002},
date = {2002-01-01},
urldate = {2002-01-01},
journal = {ERCIM News},
volume = {49},
pages = {38-40},
abstract = {The transition from traditional commerce to electronic and mobile commerce is fostered by aspects like convenience, speed and ease of use. However, security issues remain unsolved. Smart cards open new possibilities for the development of security schemes and protocols that can provide security in applications such as electronic payments or software protection where traditional cryptographic tools are not useful. The GISUM group is involved in several research projects that make use of smart cards. Current applications include a secure electronic forms framework for government-citizen relations, electronic ticketing systems for GMS phones and Internet, a PDA-based digital signature environment, public transport, access control systems, software protection and banking applications. This report focuses on two recent projects: the eTicket electronic ticketing project (1FD97 1269 C02 02 (TAP)), a coordinated project with the Carlos III University of Madrid; and the Alcance project, consisting of the development of a secure electronic forms framework for secure Internet-based communication between citizens and the public administration (1FD97 0850 (TIC)).},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez
Servicios de Notarización Electrónica
In: Revista SIC: Seguridad en Informática y Comunicaciones, vol. 38, pp. 1-5, 2001, ISSN: 1136-0623.
@article{1713,
title = {Servicios de Notarizaci\'{o}n Electr\'{o}nica},
author = {Javier Lopez},
issn = {1136-0623},
year = {2001},
date = {2001-01-01},
urldate = {2001-01-01},
journal = {Revista SIC: Seguridad en Inform\'{a}tica y Comunicaciones},
volume = {38},
pages = {1-5},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Jorge Davila, Javier Lopez
Sistemas Electrónicos de Micropago
In: Revista de Contratación Electrónica, vol. 22, pp. 3-22, 2001, ISSN: 1576-2033.
@article{1712,
title = {Sistemas Electr\'{o}nicos de Micropago},
author = {Jorge Davila and Javier Lopez},
issn = {1576-2033},
year = {2001},
date = {2001-01-01},
urldate = {2001-01-01},
journal = {Revista de Contrataci\'{o}n Electr\'{o}nica},
volume = {22},
pages = {3-22},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Jorge Davila, Javier Lopez, Felipe Rosello
Diseño de Protocolos de No-Repudio
In: Revista SIC: Seguridad en Informática y Comunicaciones, vol. 38, pp. 1-5, 2000, ISSN: 1136-0623.
@article{1714,
title = {Dise\~{n}o de Protocolos de No-Repudio},
author = {Jorge Davila and Javier Lopez and Felipe Rosello},
issn = {1136-0623},
year = {2000},
date = {2000-01-01},
urldate = {2000-01-01},
journal = {Revista SIC: Seguridad en Inform\'{a}tica y Comunicaciones},
volume = {38},
pages = {1-5},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Areitio, Javier Lopez, Jose M. Troya
Horizontes y Tendencias de Seguridad en Internet
In: Novática, vol. 145, pp. 65-71, 2000, ISSN: 0211-2124.
@article{JavierAreitio2000,
title = {Horizontes y Tendencias de Seguridad en Internet},
author = {Javier Areitio and Javier Lopez and Jose M. Troya},
url = {/wp-content/papers/JavierAreitio2000.pdf},
issn = {0211-2124},
year = {2000},
date = {2000-01-01},
urldate = {2000-01-01},
journal = {Nov\'{a}tica},
volume = {145},
pages = {65-71},
abstract = {El comercio electr\'{o}nico est\'{a} llamado a ser el fen\'{o}meno de mayor importancia en el futuro de Internet. Entre sus aplicaciones se encuentran las compras en l\'{i}nea, la banca electr\'{o}nica, la tele-educaci\'{o}n, los casinos virtuales, los servicios de pago por visi\'{o}n y v\'{i}deo bajo demanda, etc. Desde el punto de vista de la Seguridad, estas aplicaciones presentan una serie de nuevos requisitos que van a imponer un gran esfuerzo investigador a corto y medio plazo. En este art\'{i}culo se presentan algunos de los m\'{a}s importantes, como la administraci\'{o}n de la confianza, la utilizaci\'{o}n de pagos electr\'{o}nicos, la necesidad de la protecci\'{o}n de la propiedad intelectual, los servicios de protecci\'{o}n de privacidad y anonimato, y la autonom\'{i}a de c\'{o}digo y la detecci\'{o}n de fraudes, identific\'{a}ndose las \'{a}reas de investigaci\'{o}n relacionadas.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Areitio, Javier Lopez
Contribuciones de la Tecnología de Detección y Respuesta a Intrusiones y Ataques a la Construcción de la Confianza
In: Novática, vol. 141, pp. 24-27, 1999.
@article{JavierAretitio1999,
title = {Contribuciones de la Tecnolog\'{i}a de Detecci\'{o}n y Respuesta a Intrusiones y Ataques a la Construcci\'{o}n de la Confianza},
author = {Javier Areitio and Javier Lopez},
year = {1999},
date = {1999-01-01},
urldate = {1999-01-01},
journal = {Nov\'{a}tica},
volume = {141},
pages = {24-27},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Gonzalo Ramos, Javier Lopez, Rafael Morales
Comparisons of Parikh’s conditions to other conditions for context-free languages
In: Theoretical Computer Science, vol. 202, no. 1-2, pp. 231-244, 1998, ISSN: 0304-3975.
@article{GonzaloRamos1998,
title = {Comparisons of Parikh’s conditions to other conditions for context-free languages},
author = {Gonzalo Ramos and Javier Lopez and Rafael Morales},
url = {/wp-content/papers/GonzaloRamos1998.pdf},
issn = {0304-3975},
year = {1998},
date = {1998-01-01},
urldate = {1998-01-01},
journal = {Theoretical Computer Science},
volume = {202},
number = {1-2},
pages = {231-244},
publisher = {Elsevier},
abstract = {In this paper we first compare Parikh’s condition to various pumping conditions - Bar- Hillel’s pumping lemma, Ogden’s condition and Bader-Moura’s condition; secondly, to interchange condition; and finally, to Sokolowski’s and Grant“s conditions. In order to carry out these comparisons we present some properties of Parikh’s languages. The main result is the orthogonality of the previously mentioned conditions and Parikh’s condition.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Javier Lopez, Antonio Mana, Juan J. Ortega, Lucia Pino
Una Solución Integral para la Autenticación de Usuarios y la Administración de Claves en Internet
In: Novática, vol. 134, pp. 20-26, 1998, ISSN: 0211-2124.
@article{JavierLopez1998,
title = {Una Soluci\'{o}n Integral para la Autenticaci\'{o}n de Usuarios y la Administraci\'{o}n de Claves en Internet},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega and Lucia Pino},
url = {/wp-content/papers/JavierLopez1998.pdf},
issn = {0211-2124},
year = {1998},
date = {1998-01-01},
urldate = {1998-01-01},
journal = {Nov\'{a}tica},
volume = {134},
pages = {20-26},
abstract = {La seguridad es uno de los aspectos m\'{a}s conflictivos del uso de Internet. La falta de una pol\'{i}tica de seguridad global est\'{a} frenando el desarrollo de Internet en \'{a}reas tan interesantes y prometedoras como el comercio electr\'{o}nico o la interacci\'{o}n con las administraciones p\'{u}blicas. Las t\'{e}cnicas criptogr\'{a}ficas actuales proporcionan un alto grado de confidencialidad; no obstante, es dif\'{i}cil garantizar la identificaci\'{o}n segura de los usuarios y, adem\'{a}s, la gesti\'{o}n de las claves de los mismos es poco eficiente y presenta graves problemas de escalabilidad y seguridad. En este trabajo se describe una soluci\'{o}n a ambos problemas basada en una Infraestructura de Clave P\'{u}blica que proporciona una administraci\'{o}n simple y eficiente de las claves de los usuarios y posibilita la autenticaci\'{o}n segura de los mismos. El sistema se ha probado con \'{e}xito de forma local y, en breve, ser\'{a} instalado para su prueba por parte de la comunidad de usuarios de RedIris.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cristina Alcaraz, Davide Ferraris, Héctor Guzmán, Javier Lopez
Blockchain-based Multi-Signature System for Critical Scenarios
In: 22nd International Conference on Security, Cryptography (SECRYPT 2025) (Ed.): SECRYPT 2025, 2025.
@inproceedings{alcarazBlock25,
title = {Blockchain-based Multi-Signature System for Critical Scenarios},
author = {Cristina Alcaraz and Davide Ferraris and H\'{e}ctor Guzm\'{a}n and Javier Lopez},
editor = {22nd International Conference on Security and Cryptography (SECRYPT 2025)},
year = {2025},
date = {2025-06-13},
urldate = {2025-06-13},
publisher = {SECRYPT 2025},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Patxi Juaristi, Isaac Agudo, Ruben Rios, Laura Ricci
Benchmarking post-quantum cryptography in Ethereum-based blockchains
In: 8th International Workshop on Cryptocurrencies and Blockchain Technology (CBT 2024), pp. 340-353, Springer, Bydgoszcz, Poland, 2025, ISBN: 978-3-031-82348-0.
@inproceedings{agudo2024cbt,
title = {Benchmarking post-quantum cryptography in Ethereum-based blockchains},
author = {Patxi Juaristi and Isaac Agudo and Ruben Rios and Laura Ricci},
url = {/wp-content/papers/agudo2024cbt.pdf},
doi = {10.1007/978-3-031-82349-7_23},
isbn = {978-3-031-82348-0},
year = {2025},
date = {2025-04-06},
urldate = {2024-09-19},
booktitle = {8th International Workshop on Cryptocurrencies and Blockchain Technology (CBT 2024)},
volume = {LNCS},
number = {15263},
pages = {340-353},
publisher = {Springer},
address = {Bydgoszcz, Poland},
abstract = {Blockchain technology has significantly transformed various industries by enabling secure and tamper-resistant transactions. However, the rise of quantum computing threatens the cryptographic foundations of blockchain networks, making blockchain vulnerable to signature forgery and transaction manipulation. This raises concerns about the long-term viability of blockchain systems and highlights the need for post-quantum secure solutions.
This paper investigates the feasibility of quantum-resistant blockchain ecosystems. Our research focuses on estimating the cost of the integration of the post-quantum algorithms selected in the NIST standardization competition into Ethereum-based blockchains.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper investigates the feasibility of quantum-resistant blockchain ecosystems. Our research focuses on estimating the cost of the integration of the post-quantum algorithms selected in the NIST standardization competition into Ethereum-based blockchains.

Pablo Sánchez-Serrano, Ruben Rios, Isaac Agudo
Privacy-preserving tabular data generation: Systematic Literature Review
In: 19th DPM International Workshop on Data Privacy Management (DPM 2024), pp. 170-180, Springer, Bydgoszcz, Poland, 2025, ISBN: 978-3-031-82348-0.
@inproceedings{pablo2024dpm,
title = {Privacy-preserving tabular data generation: Systematic Literature Review},
author = {Pablo S\'{a}nchez-Serrano and Ruben Rios and Isaac Agudo},
url = {/wp-content/papers/pablo2024dpm.pdf},
doi = {10.1007/978-3-031-82349-7_12},
isbn = {978-3-031-82348-0},
year = {2025},
date = {2025-04-06},
urldate = {2024-09-19},
booktitle = {19th DPM International Workshop on Data Privacy Management (DPM 2024)},
volume = {LNCS},
number = {15263},
pages = {170-180},
publisher = {Springer},
address = {Bydgoszcz, Poland},
abstract = {There is a wide range of tabular data, such as medical, financial or demographic data, which are of great value to science, economy and social progress. However, this type of data contains sensitive information. Privacy concerns need to be taken into account when sharing such data. Traditional methods, such as anonymisation or pseudo-anonymisation, are based on modifying databases to meet certain privacy guarantees. In recent years, with the growth of AI, the possibility of using generative models has been raised as a way to generate synthetic data that guarantees the privacy of individuals while maintaining their utility. This systematic literature review aims to identify and classify existing privacy-guaranteed tabular generative models to create a taxonomy that classifies them. In addition, we analyze the privacy metrics and techniques they use, and identify possible unexplored lines of research.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Davide Ferraris, Lorenzo Monti
DrATC: Dynamic routing Algorithm based on Trust Characteristics
In: The 20th International Workshop on Security and Trust Management (STM 2024), Springer, Bydgoszcz, Poland, 2024.
BibTeX | Links:
@inproceedings{ferraris2024stm,
title = {DrATC: Dynamic routing Algorithm based on Trust Characteristics},
author = {Davide Ferraris and Lorenzo Monti},
url = {/wp-content/papers/ferraris2024stm.pdf},
year = {2024},
date = {2024-09-19},
urldate = {2024-12-31},
booktitle = {The 20th International Workshop on Security and Trust Management (STM 2024)},
publisher = {Springer},
address = {Bydgoszcz, Poland},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Davide Ferraris, Konstantinos Kotis, Christos Kalloniatis
Enhancing TrUStAPIS Methodology in the Web of Things with LLM-generated IoT Trust Semantics
In: 26th International Conference on Information and Communications Security (ICICS 2024), Springer, Mytilene, Lesvos, Greece, 2024.
BibTeX | Links:
@inproceedings{ferraris2024ici,
title = {Enhancing TrUStAPIS Methodology in the Web of Things with LLM-generated IoT Trust Semantics},
author = {Davide Ferraris and Konstantinos Kotis and Christos Kalloniatis},
url = {/wp-content/papers/ferraris2024ici.pdf},
year = {2024},
date = {2024-08-27},
urldate = {2024-12-31},
booktitle = {26th International Conference on Information and Communications Security (ICICS 2024)},
publisher = {Springer},
address = {Mytilene, Lesvos, Greece},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Panagiotis Bountakas, Konstantinos Fysarakis, Thomas Kyriakakis, Panagiotis Karafotis, Sotiropoulos Aristeidis, Maria Tasouli, Cristina Alcaraz, George Alexandris, Vassiliki Andronikou, Tzortzia Koutsouri, Romarick Yatagha, George Spanoudakis, Sotiris Ioannidis, Fabio Martinelli, Oleg Illiashenko
SYNAPSE – An Integrated Cyber Security Risk & Resilience Management Platform, With Holistic Situational Awareness, Incident Response & Preparedness Capabilities Forthcoming
In: 4th International Workshop on Advances on Privacy Preserving Technologies and Solutions(IWAPS) , Forthcoming.
@inproceedings{Alcaraz2024a,
title = {SYNAPSE - An Integrated Cyber Security Risk \& Resilience Management Platform, With Holistic Situational Awareness, Incident Response \& Preparedness Capabilities},
author = {Panagiotis Bountakas, Konstantinos Fysarakis, Thomas Kyriakakis, Panagiotis Karafotis, Sotiropoulos Aristeidis, Maria Tasouli, Cristina Alcaraz, George Alexandris, Vassiliki Andronikou, Tzortzia Koutsouri, Romarick Yatagha, George Spanoudakis, Sotiris Ioannidis, Fabio Martinelli, Oleg Illiashenko},
url = {https://www.ares-conference.eu/iwaps},
year = {2024},
date = {2024-07-31},
urldate = {2024-07-31},
booktitle = {4th International Workshop on Advances on Privacy Preserving Technologies and Solutions(IWAPS) },
abstract = {In an era of escalating cyber threats, the imperative for robust and comprehensive cybersecurity measures has never been more pressing. To address this challenge, SYNAPSE presents a pioneering approach by conceptualising, designing, and delivering an Integrated Cyber Security Risk \& Resilience Management Platform. This platform embodies a holistic framework, synthesising key elements of situational awareness, incident response, and preparedness (i.e., cyber range), augmented by advanced AI capabilities. Through its holistic approach, SYNAPSE aims to elevate cyber resilience by not only mitigating threats but also fostering a culture of proactive defence, informed decision-making, and collaborative response within organisations and across industries.},
keywords = {},
pubstate = {forthcoming},
tppubtype = {inproceedings}
}

Alberto Garcia, Cristina Alcaraz, Javier Lopez
MAS para la convergencia de opiniones y detección de anomalías en sistemas ciberfísicos distribuidos
In: VIII Jornadas Nacionales de Investigación en Ciberseguridad (JNIC), Vigo, 2023.
BibTeX | Links:
@inproceedings{Garcia2023,
title = {MAS para la convergencia de opiniones y detecci\'{o}n de anomal\'{i}as en sistemas ciberf\'{i}sicos distribuidos},
author = {Alberto Garcia and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Garcia2023.pdf},
year = {2023},
date = {2023-12-31},
urldate = {2023-12-31},
booktitle = {VIII Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC)},
address = {Vigo},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Daniel Morales, Isaac Agudo
Cryptographic approaches for confidential computations in blockchain
In: XVI Jornadas de Ingeniería Telemática, pp. 110-113, Barcelona, 2023, ISBN: 978-84-09-58148-1.
@inproceedings{morales2023jitel,
title = {Cryptographic approaches for confidential computations in blockchain},
author = {Daniel Morales and Isaac Agudo},
url = {/wp-content/papers/morales2023jitel.pdf},
isbn = {978-84-09-58148-1},
year = {2023},
date = {2023-11-09},
urldate = {2023-11-09},
booktitle = {XVI Jornadas de Ingenier\'{i}a Telem\'{a}tica},
pages = {110-113},
address = {Barcelona},
abstract = {Blockchain technologies have been widely researched in the last decade, mainly because of the revolution they propose for different use cases. Moving away from centralized solutions that abuse their capabilities, blockchain looks like a great solution for integrity, transparency, and decentralization. However, there are still some problems to be solved, lack of privacy being one of the main ones. In this paper, we focus on a subset of the privacy area, which is confidentiality. Although users are increasingly aware of the importance of confidentiality, blockchain poses a barrier to the confidential treatment of data. We initiate the study of cryptographic confidential computing tools and focus on how these technologies can endow the blockchain with better capabilities, i.e., enable rich and versatile applications while protecting users’ data. We identify Zero Knowledge Proofs, Fully Homomorphic Encryption, and Secure Multiparty Computation as good candidates to achieve this.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Daniel Morales, Isaac Agudo, Javier Lopez
Integration of MPC into Besu through an extended private transaction model
In: IEEE International Conference on Metaverse Computing, Networking and Applications, pp. 266-273, IEEE Computer Society IEEE, Kyoto, Japan, 2023.
@inproceedings{morales2023metacom,
title = {Integration of MPC into Besu through an extended private transaction model},
author = {Daniel Morales and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/morales2023metacom.pdf},
doi = {10.1109/MetaCom57706.2023.00056},
year = {2023},
date = {2023-06-01},
urldate = {2023-06-01},
booktitle = {IEEE International Conference on Metaverse Computing, Networking and Applications},
pages = {266-273},
publisher = {IEEE},
address = {Kyoto, Japan},
organization = {IEEE Computer Society},
abstract = {In the last few years we have seen many different approaches to incorporate privacy features to blockchains. In the area of cryptocurrencies that would normally mean protecting the identity of the owner of some funds, but there are other applications where privacy is even more important, especially in permissioned blockchains.
Permissioned blockchain platforms, such as Hyperledger Besu or Hyperledger Fabric, already include the concept of private transactions, which essentially defines a sub-group of the blockchain where their participants share some private data.
We want to go one step ahead and propose an extended model for private transactions where the different participants can have a separated view of the same transaction, allowing the integration of Multi-party Computation protocols in the blockchain.
Our work extends Hyperledger Besu’s design for private transactions, offering better security properties and a finer grain customization. We cover two specific MPC examples, Private Set Intersection and Byzantine Fault-Tolerant Random Number Generation, and propose a mechanism to run them using smart contract interfaces.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Permissioned blockchain platforms, such as Hyperledger Besu or Hyperledger Fabric, already include the concept of private transactions, which essentially defines a sub-group of the blockchain where their participants share some private data.
We want to go one step ahead and propose an extended model for private transactions where the different participants can have a separated view of the same transaction, allowing the integration of Multi-party Computation protocols in the blockchain.
Our work extends Hyperledger Besu’s design for private transactions, offering better security properties and a finer grain customization. We cover two specific MPC examples, Private Set Intersection and Byzantine Fault-Tolerant Random Number Generation, and propose a mechanism to run them using smart contract interfaces.
Pablo Pérez Jiménez, Jose A. Onieva, Gerardo Fernandez
CCBHash (Compound Code Block Hash) para Análisis de Malware
In: XVII Reunión Española sobre Criptología y Seguridad de la Información, pp. 168-173, 2022, ISBN: 978-84-19024-14-5.
@inproceedings{2033,
title = {CCBHash (Compound Code Block Hash) para An\'{a}lisis de Malware},
author = {Pablo P\'{e}rez Jim\'{e}nez and Jose A. Onieva and Gerardo Fernandez},
url = {/wp-content/papers/2033.pdf},
isbn = {978-84-19024-14-5},
year = {2022},
date = {2022-11-01},
urldate = {2022-11-01},
booktitle = {XVII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n},
pages = {168-173},
abstract = {En estos \'{u}ltimos a\~{n}os, el an\'{a}lisis de malware ha adquirido una importancia cada vez mayor debido al aumento de ataques inform\'{a}ticos, cada vez m\'{a}s sofisticados. Uno de los objetivos que tiene esta rama de la ciberseguridad es encontrar similitudes entre distintos ficheros, permitiendo as\'{i} detectar y clasificar malware e incluso, en algunos casos, realizar atribuciones.
En este trabajo desarrollaremos un fuzzy hash capaz de caracterizar el malware generando una firma f\'{a}cilmente comparable y almacenable de sus funciones. Ya que nuestra meta es poder detectar estas similitudes en grandes cantidades de datos en un periodo de tiempo razonable, el tama\~{n}o del hash debe ser limitado a la vez que guarde la m´axima informaci\'{o}n posible.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
En este trabajo desarrollaremos un fuzzy hash capaz de caracterizar el malware generando una firma fácilmente comparable y almacenable de sus funciones. Ya que nuestra meta es poder detectar estas similitudes en grandes cantidades de datos en un periodo de tiempo razonable, el tamaño del hash debe ser limitado a la vez que guarde la m´axima información posible.
Manuel Ruiz, Ruben Rios, Rodrigo Roman, Antonio Muñoz, Juan Manuel Martínez, Jorge Wallace
AndroCIES: Automatización de la certificación de seguridad para aplicaciones Android
In: XVII Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2022), pp. 192-197, Ediciones Universidad Cantabria Ediciones Universidad Cantabria, Santander, Spain, 2022.
@inproceedings{2016,
title = {AndroCIES: Automatizaci\'{o}n de la certificaci\'{o}n de seguridad para aplicaciones Android},
author = {Manuel Ruiz and Ruben Rios and Rodrigo Roman and Antonio Mu\~{n}oz and Juan Manuel Mart\'{i}nez and Jorge Wallace},
url = {/wp-content/papers/2016.pdf},
year = {2022},
date = {2022-10-01},
urldate = {2022-10-01},
booktitle = {XVII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2022)},
volume = {265},
pages = {192-197},
publisher = {Ediciones Universidad Cantabria},
address = {Santander, Spain},
organization = {Ediciones Universidad Cantabria},
abstract = {El auge de las plataformas m\'{o}viles est\'{a} impulsando el desarrollo de un gran n\'{u}mero de aplicaciones, muchas de las cuales salen al mercado sin las convenientes comprobaciones de seguridad. Recientemente, Google est\'{a} apostando por hacer este problema m\'{a}s visible y concienciar a los usuarios de la necesidad de instalar aplicaciones verificadas por laboratorios independientes. Sin embargo, la certificaci\'{o}n de aplicaciones suele ser una tarea ardua y no exenta de errores. Por ello, en este trabajo, presentamos la herramienta AndroCIES, que es capaz de automatizar en gran medida las evaluaciones necesarias para la certificaci\'{o}n de aplicaciones m\'{o}viles, reduciendo en torno a un 20% el tiempo empleado en este proceso.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jesus Cumplido, Cristina Alcaraz, Javier Lopez
Collaborative anomaly detection system for charging stations
In: The 27th European Symposium on Research in Computer Security (ESORICS 2022), pp. 716–736, Springer, Cham Springer, Cham, 2022.
@inproceedings{Alcaraz2022c,
title = {Collaborative anomaly detection system for charging stations},
author = {Jesus Cumplido and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/Alcaraz2022c.pdf},
doi = {10.1007/978-3-031-17146-8_35},
year = {2022},
date = {2022-09-01},
urldate = {2022-09-01},
booktitle = {The 27th European Symposium on Research in Computer Security (ESORICS 2022)},
volume = {13555},
pages = {716\textendash736},
publisher = {Springer, Cham},
organization = {Springer, Cham},
abstract = {In recent years, the deployment of charging infrastructures has been increasing exponentially due to the high energy demand of electric vehicles, forming complex charging networks. These networks pave the way for the emergence of new unknown threats in both the energy and transportation sectors. Economic damages and energy theft are the most frequent risks in these environments. Thus, this paper aims to present a solution capable of accurately detecting unforeseen events and possible fraud threats that arise during charging sessions at charging stations through the current capabilities of the Machine Learning (ML) algorithms. However, these algorithms have the drawback of not fitting well in large networks and generating a high number of false positives and negatives, mainly due to the mismatch with the distribution of data over time. For that reason, a Collaborative Anomaly Detection System for Charging Stations (here referred to as CADS4CS) is proposed as an optimization measure. CADS4CS has a central analysis unit that coordinates a group of independent anomaly detection systems to provide greater accuracy using a voting algorithm. In addition, CADS4CS has the feature of continuously retraining ML models in a collaborative manner to ensure that they are adjusted to the distribution of the data. To validate the approach, different use cases and practical studies are addressed to demonstrate the effectiveness and efficiency of the solution.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Luca Faramondi, Marta Grassi, Simone Guarino, Roberto Setola, Cristina Alcaraz
Configuration vulnerability in SNORT for Windows operating systems
In: 2022 IEEE International Conference on Cyber Security and Resilience (IEEE CSR), pp. 82-89, IEEE IEEE, https://www.ieee-csr.org, 2022, ISBN: 978-1-6654-9952-1.
@inproceedings{1990,
title = {Configuration vulnerability in SNORT for Windows operating systems},
author = {Luca Faramondi and Marta Grassi and Simone Guarino and Roberto Setola and Cristina Alcaraz},
url = {/wp-content/papers/1990.pdf
https://ieeexplore.ieee.org/document/9850309},
doi = {10.1109/CSR54599.2022.9850309},
isbn = {978-1-6654-9952-1},
year = {2022},
date = {2022-08-01},
urldate = {2022-08-01},
booktitle = {2022 IEEE International Conference on Cyber Security and Resilience (IEEE CSR)},
pages = {82-89},
publisher = {IEEE},
address = {https://www.ieee-csr.org},
organization = {IEEE},
abstract = {Cyber-attacks against Industrial Control Systems (ICS) can lead to catastrophic events which can be prevented by the use of security measures such as the Intrusion Prevention Systems (IPS). In this work we experimentally demonstrate how to exploit the configuration vulnerabilities of SNORT one of the most adopted IPSs to significantly degrade the effectiveness of the IPS and consequently allowing successful cyber-attacks. We illustrate how to design a batch script able to retrieve and modify the configuration files of SNORT in order to disable its ability to detect and block Denial of Service (DoS) and ARP poisoning-based Man-In-The-Middle (MITM) attacks against a Programmable Logic Controller (PLC) in an ICS network. Experimental tests performed on a water distribution testbed show that, despite the presence of IPS, the DoS and ARP spoofed packets reach the destination causing respectively the disconnection of the PLC from the ICS network and the modification of packets payload.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Daniel Morales, Isaac Agudo, Javier Lopez
Real-time Crowd Counting based on Wearable Ephemeral IDs
In: 19th International Conference on Security and Cryptography (SECRYPT 2022), pp. 249-260, Scitepress Scitepress, Lisbon, 2022, ISSN: 2184-7711.
@inproceedings{morales2022cc,
title = {Real-time Crowd Counting based on Wearable Ephemeral IDs},
author = {Daniel Morales and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/morales2022cc.pdf},
doi = {10.5220/0011327200003283},
issn = {2184-7711},
year = {2022},
date = {2022-07-01},
urldate = {2022-07-01},
booktitle = {19th International Conference on Security and Cryptography (SECRYPT 2022)},
pages = {249-260},
publisher = {Scitepress},
address = {Lisbon},
organization = {Scitepress},
abstract = {Crowd Counting is a very interesting problem aiming at counting people typically based on density averages and/or aerial images. This is very useful to prevent crowd crushes, especially on urban environments with high crowd density, or to count people in public demonstrations. In addition, in the last years, it has become of paramount importance for pandemic management. For those reasons, giving users automatic mechanisms to anticipate high risk situations is essential. In this work, we analyze ID-based Crowd Counting, and propose a real-time Crowd Counting system based on the Ephemeral ID broadcast by contact tracing applications on wearable devices. We also performed some simulations that show the accuracy of our system in different situations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Davide Ferraris, Carmen Fernandez-Gago, Javier Lopez
Verification and Validation Methods for a Trust-by-Design Framework for the IoT
In: 36th Annual IFIP WG 11.3 Conference on Data and Applications Security and Privacy (DBSec’22), pp. 183-194, Springer Springer, Newark, NJ, USA, 2022, ISBN: 978-3-031-10683-5.
BibTeX | Links:
@inproceedings{1981,
title = {Verification and Validation Methods for a Trust-by-Design Framework for the IoT},
author = {Davide Ferraris and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/1981.pdf
https://link.springer.com/chapter/10.1007/978-3-031-10684-2_11, },
doi = {10.1007/978-3-031-10684-2_11},
isbn = {978-3-031-10683-5},
year = {2022},
date = {2022-07-01},
urldate = {2022-07-01},
booktitle = {36th Annual IFIP WG 11.3 Conference on Data and Applications Security and Privacy (DBSec’22)},
volume = {13383},
pages = {183-194},
publisher = {Springer},
address = {Newark, NJ, USA},
organization = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Alberto Garcia, Javier Lopez
Implicaciones de seguridad en MAS Desplegados en Infraestructuras de Carga basadas en OCPP
In: VII Jornadas Nacionales en Investigación en Ciberseguridad (JNIC 2022), pp. 172-179, 2022, ISBN: 978-84-88734-13-6.
@inproceedings{1989,
title = {Implicaciones de seguridad en MAS Desplegados en Infraestructuras de Carga basadas en OCPP},
author = {Cristina Alcaraz and Alberto Garcia and Javier Lopez},
url = {/wp-content/papers/1989.pdf},
isbn = {978-84-88734-13-6},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
booktitle = {VII Jornadas Nacionales en Investigaci\'{o}n en Ciberseguridad (JNIC 2022)},
pages = {172-179},
abstract = {El inter\'{e}s actual por desplegar infraestructuras de carga de veh\'{i}culos el\'{e}ctricos para el ahorro energ\'{e}tico y la sostenibilidad es cada vez m\'{a}s palpable, lo que llama la atenci\'{o}n a muchas comunidades, especialmente a la cient\'{i}fica, para explorar, entre otras cosas, la influencia de las nuevas tecnolog\'{i}as de informaci\'{o}n en los procesos operacionales. Teniendo en cuenta este escenario, este art\'{i}culo, por tanto, analiza c\'{o}mo el uso de los sistemas de multi-agente pueden beneficiar las tareas de monitorizaci\'{o}n, mantenimiento y de seguridad, y propone una arquitectura espec\'{i}fica en base a los actores especificados en el protocolo OCPP (Open Charge Point Protocol). Esta arquitectura constituye la base para analizar los diversos tipos de amenazas que agentes software pueden sufrir, clasific\'{a}ndolas de acuerdo a las caracter\'{i}sticas funcionales e interacciones con los diversos elementos de la infraestructura. Esta agrupaci\'{o}n y el conjunto de ataques abordados est\'{a}n basados en el SP-800-19 definido por el National Institute of Standards and Technology, y formalizados siguiendo la metodolog\'{i}a de \'{a}rboles de ataque. El estudio revela la importancia que tiene analizar los riesgos que esta tecnolog\'{i}a puede traer a este escenario, proporcionando, adem\'{a}s, un conjunto de recomendaciones que sirvan de gu\'{i}a para aplicaciones futuras.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Davide Ferraris, Carmen Fernandez-Gago, Javier Lopez
Novel Approaches for the Development of Trusted IoT Entities
In: 37th International Conference on ICT Systems Security and Privacy Protection – IFIP SEC 2022, pp. 215-230, Springer Springer, Copenhagen, 2022, ISSN: 1868-4238.
BibTeX | Links:
@inproceedings{1980,
title = {Novel Approaches for the Development of Trusted IoT Entities},
author = {Davide Ferraris and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/1980.pdf
https://link.springer.com/content/pdf/10.1007%2F978-3-031-06975-8_13, },
doi = {10.1007/978-3-031-06975-8},
issn = {1868-4238},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
booktitle = {37th International Conference on ICT Systems Security and Privacy Protection \textendash IFIP SEC 2022},
pages = {215-230},
publisher = {Springer},
address = {Copenhagen},
organization = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Manuel Ruiz, Ruben Rios, Rodrigo Roman, Javier Lopez
Privacidad Contextual en entornos Edge
In: VII Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2022), pp. 122-129, Bilbao, Spain, 2022, ISBN: 978-84-88734-13-6.
@inproceedings{1979,
title = {Privacidad Contextual en entornos Edge},
author = {Manuel Ruiz and Ruben Rios and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/1979.pdf},
isbn = {978-84-88734-13-6},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
booktitle = {VII Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2022)},
pages = {122-129},
address = {Bilbao, Spain},
abstract = {La privacidad contextual se refiere a la protecci\'{o}n de toda aquella informaci\'{o}n que puede desprenderse de la interacci\'{o}n entre usuarios y/o servicios, exceptuando los datos que el propio usuario elige transmitir. La localizaci\'{o}n, el tiempo, los patrones de uso y los diferentes par\'{a}metros necesarios para realizar la comunicaci\'{o}n son algunos ejemplos. Este tipo de privacidad es extremadamente importante en la computaci\'{o}n edge debido al acercamiento de los recursos de la infraestructura a los usuarios. Por ello, el objetivo de este trabajo es ofrecer un an\'{a}lisis y clasificaci\'{o}n de las diferentes soluciones propuestas en la literatura respecto a la privacidad contextual en entornos edge, mostrando tanto las capacidades de los mecanismos actuales como los desaf\'{i}os en este campo.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Jesus Cumplido, Alicia Triviño
Monitorización Segura en Infraestructuras de Carga de Vehículos Eléctricos Frente a Ciber-Ataques
In: Actas del XII International Greencities Congress, Greencities, Inteligencia y Sostenibilidad Urbana, & S-Moving, Movilidad Inteligente y Sostenible, pp. 17-30, FYCMA – Palacio de Ferias y Congresos de Málaga, 2021, ISBN: 978-84-09-19596-1.
@inproceedings{Alcaraz2021m,
title = {Monitorizaci\'{o}n Segura en Infraestructuras de Carga de Veh\'{i}culos El\'{e}ctricos Frente a Ciber-Ataques},
author = {Cristina Alcaraz and Jesus Cumplido and Alicia Trivi\~{n}o},
isbn = {978-84-09-19596-1},
year = {2021},
date = {2021-09-01},
urldate = {2021-09-01},
booktitle = {Actas del XII International Greencities Congress, Greencities, Inteligencia y Sostenibilidad Urbana, \& S-Moving, Movilidad Inteligente y Sostenible},
pages = {17-30},
publisher = {FYCMA - Palacio de Ferias y Congresos de M\'{a}laga},
abstract = {Para alcanzar los objetivos de reducci\'{o}n de emisiones contaminantes, se est\'{a} fomentando en la actualidad la inclusi\'{o}n de nuevas t\'{e}cnicas de generaci\'{o}n, producci\'{o}n y consumo de energ\'{i}a renovable junto con el despliegue eficaz de nuevas t\'{e}cnicas en las redes el\'{e}ctricas inteligentes. Entre estas t\'{e}cnicas, nos encontramos con la gesti\'{o}n de Veh\'{i}culos El\'{e}ctricos (VE) e infraestructuras de Puntos de Carga (PC), que impulsan la movilidad sostenible y act\'{u}an como cargas controlables o como generadores potenciales. Aunque existe mucho inter\'{e}s por desplegar estos tipos de infraestructuras debido a los motivos anteriores, \'{e}stas son muy susceptibles a m\'{u}ltiples tipos de amenazas, especialmente las infraestructuras de PC al ser sistemas que se despliegan en zonas abiertas y accesibles por el p\'{u}blico en general, lo que conlleva a diversos riesgos de seguridad. En la literatura, ya hay varios estudios realizados que demuestran c\'{o}mo las infraestructuras de carga y sus modos de control pueden ser susceptibles a m\'{u}ltiples tipos de ataques, la mayor\'{i}a de ellos causados por el modo de configuraci\'{o}n y el despliegue de los PC y sus infraestructuras de comunicaci\'{o}n para el control.
Dado este escenario, este art\'{i}culo presenta los objetivos de “Urban Lab II”, un proyecto de la Universidad de M\'{a}laga (UMA) que aborda todos estos problemas de seguridad, teniendo en cuenta los beneficios que las nuevas tecnolog\'{i}as de informaci\'{o}n pueden aportar para anticipar anomal\'{i}as o el mal uso de los recursos. Dentro de este proyecto, se han identificado como dos amenazas relevantes relacionadas con las infraestructuras de carga, que son: (i) sobrecalentamiento de componentes por alteraciones maliciosas en los flujos de potencia y (ii) robo de energ\'{i}a y fraude econ\'{o}mico. Para hacer frente a estas amenazas, el presente art\'{i}culo tambi\'{e}n identifica, por un lado, los requisitos de seguridad m\'{a}s representativos que prevengan estas dos amenazas. Adem\'{a}s, se completa este estudio detallando las tecnolog\'{i}as habilitadoras que faciliten no solo la gesti\'{o}n y la monitorizaci\'{o}n eficiente de la energ\'{i}a, sino los objetivos primordiales de estos desaf\'{i}os de seguridad.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Dado este escenario, este artículo presenta los objetivos de “Urban Lab II”, un proyecto de la Universidad de Málaga (UMA) que aborda todos estos problemas de seguridad, teniendo en cuenta los beneficios que las nuevas tecnologías de información pueden aportar para anticipar anomalías o el mal uso de los recursos. Dentro de este proyecto, se han identificado como dos amenazas relevantes relacionadas con las infraestructuras de carga, que son: (i) sobrecalentamiento de componentes por alteraciones maliciosas en los flujos de potencia y (ii) robo de energía y fraude económico. Para hacer frente a estas amenazas, el presente artículo también identifica, por un lado, los requisitos de seguridad más representativos que prevengan estas dos amenazas. Además, se completa este estudio detallando las tecnologías habilitadoras que faciliten no solo la gestión y la monitorización eficiente de la energía, sino los objetivos primordiales de estos desafíos de seguridad.

Martin Kolar, Carmen Fernandez-Gago, Javier Lopez
A Model Specification Implementation for Trust Negotiation
In: The 14th International Conference on Network and System Security (NSS 2020), pp. 327-341, Springer Springer, Melbourne, Australia, 2020.
@inproceedings{1852,
title = {A Model Specification Implementation for Trust Negotiation},
author = {Martin Kolar and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/1852.pdf},
year = {2020},
date = {2020-11-01},
urldate = {2020-11-01},
booktitle = {The 14th International Conference on Network and System Security (NSS 2020)},
volume = {12570},
pages = {327-341},
publisher = {Springer},
address = {Melbourne, Australia},
organization = {Springer},
abstract = {Trust negotiation represents a suitable approach for building trust in online environments, where the interacting entities are anonymous. It covers important criteria on security and privacy. In this work, we propose a method for implementing our model specification that handles trust negotiation. We define the structure of the trust negotiation module that is a standalone unit capable of negotiating on its own. It may be included to any software by its defined interfaces. We realise our method with a ride-sharing scenario and four trust negotiation strategies that we apply in order to validate our design and implementation. We propose a solution that is fully customisable based on different requirements. The proposal provides guidelines for developers in the process of including trust negotiation into their software.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Cristina Alcaraz, Javier Lopez
Game Theory-Based Approach for Defense against APTs
In: 18th International Conference on Applied Cryptography and Network Security (ACNS’20), pp. 297-320, Springer Springer, 2020, ISBN: 978-3-030-57878-7.
BibTeX | Links:
@inproceedings{1840,
title = {Game Theory-Based Approach for Defense against APTs},
author = {Juan E. Rubio and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1840.pdf},
doi = {10.1007/978-3-030-57878-7_15},
isbn = {978-3-030-57878-7},
year = {2020},
date = {2020-10-01},
urldate = {2020-10-01},
booktitle = {18th International Conference on Applied Cryptography and Network Security (ACNS’20)},
volume = {12147},
pages = {297-320},
publisher = {Springer},
organization = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Cristina Alcaraz, Ruben Rios, Rodrigo Roman, Javier Lopez
Distributed Detection of APTs: Consensus vs. Clustering
In: 25th European Symposium on Research in Computer Security (ESORICS 2020), pp. 174-192, 2020, ISBN: 978-3-030-58951-6.
BibTeX | Links:
@inproceedings{1846,
title = {Distributed Detection of APTs: Consensus vs. Clustering},
author = {Juan E. Rubio and Cristina Alcaraz and Ruben Rios and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/1846.pdf},
doi = {10.1007/978-3-030-58951-6_9},
isbn = {978-3-030-58951-6},
year = {2020},
date = {2020-09-01},
urldate = {2020-09-01},
booktitle = {25th European Symposium on Research in Computer Security (ESORICS 2020)},
volume = {12308},
pages = {174-192},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Antonio Muñoz
ICITPM: Integrity validation of software in iterative Continuous Integration through the use of Trusted Platform Module (TPM)
In: Aristeidis Farao (Ed.): 1st Workshop on Dependability and Safety Emerging Cloud and Fog Systems (DeSECSyS) – Colocated with ESORICS, Guildford (United Kingdom). September 2020., pp. 147–165, Springer Springer, 2020, ISBN: 978-3-030-66504-3.
@inproceedings{munoz2020icitpm,
title = {ICITPM: Integrity validation of software in iterative Continuous Integration through the use of Trusted Platform Module (TPM)},
author = {Antonio Mu\~{n}oz},
editor = {Aristeidis Farao},
url = {/wp-content/papers/munoz2020icitpm.pdf},
doi = {10.1007/978-3-030-66504-3_9},
isbn = {978-3-030-66504-3},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
booktitle = {1st Workshop on Dependability and Safety Emerging Cloud and Fog Systems (DeSECSyS) - Colocated with ESORICS, Guildford (United Kingdom). September 2020.},
volume = {12580},
pages = {147\textendash165},
publisher = {Springer},
organization = {Springer},
abstract = {Software development has passed from being rigid and not very flexible, to be automated with constant changes. This happens due to the creation of continuous integration and delivery environments. Nevertheless, developers often rely on such environments due to the large number of amenities they offer. They focus on authentication only, without taking into consideration other aspects of security such as the integrity of the source code and of the compiled binaries. The source code of a software project must not be maliciously modified. Notwithstanding, there is no safe method to verify that its integrity has not been violated. Trusted computing technology, in particular, the Trusted Platform Module (TPM) can be used to implement that secure method.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Ruben Rios, Ana Nieto
Personalized Computer Security Tasks with Automatic Evaluation and Feedback
In: International Conference on Information Systems Education and Research (AIS SIGED 2019), 2019, ISBN: 978-1-7343123-0-0.
BibTeX | Links:
@inproceedings{1835,
title = {Personalized Computer Security Tasks with Automatic Evaluation and Feedback},
author = {Isaac Agudo and Ruben Rios and Ana Nieto},
url = {/wp-content/papers/1835.pdf},
isbn = {978-1-7343123-0-0},
year = {2019},
date = {2019-12-01},
urldate = {2019-12-01},
booktitle = {International Conference on Information Systems Education and Research (AIS SIGED 2019)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Aristeidis Farao, Juan E. Rubio, Cristina Alcaraz, Christoforos Ntantogian, Christos Xenakis, Javier Lopez
SealedGRID: A Secure Interconnection of Technologies for Smart Grid Applications
In: 14th International Conference on Critical Information Infrastructures Security (CRITIS 2019), pp. 169-175, Springer, Cham Springer, Cham, 2019, ISBN: 978-3-030-37669-7.
@inproceedings{1815,
title = {SealedGRID: A Secure Interconnection of Technologies for Smart Grid Applications},
author = {Aristeidis Farao and Juan E. Rubio and Cristina Alcaraz and Christoforos Ntantogian and Christos Xenakis and Javier Lopez},
url = {/wp-content/papers/1815.pdf},
doi = {10.1007/978-3-030-37670-3_14},
isbn = {978-3-030-37669-7},
year = {2019},
date = {2019-12-01},
urldate = {2019-12-01},
booktitle = {14th International Conference on Critical Information Infrastructures Security (CRITIS 2019)},
volume = {11777},
pages = {169-175},
publisher = {Springer, Cham},
organization = {Springer, Cham},
abstract = {In recent years, the Smart Grid has increasingly integrated cutting-edge technologies that generate several benefits for all the stakeholders involved, such as a more accurate billing system and enhanced Demand Response procedures. However, this modernization also brings with it diverse cyber security and privacy issues, which sets the necessity for developing a security platform specifically tailored to this scenario. In this paper, we present SealedGRID, which proposes a flexible architecture that provides security services at all levels by implementing Trusted Execution Environments on their devices, together with advanced authentication and authorization mechanisms, as well as privacy preserving techniques. These technologies are presented in depth and a final security analysis is conducted, which highlights the contributions of this project.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Isaac Agudo, Manuel Montenegro-Gómez
Desarrollo de un semáforo inteligente basado en comunicaciones seguras
In: XIV Jornadas de Ingeniería Telemática (JITEL 2019), 2019.
@inproceedings{1985,
title = {Desarrollo de un sem\'{a}foro inteligente basado en comunicaciones seguras},
author = {Isaac Agudo and Manuel Montenegro-G\'{o}mez},
url = {/wp-content/papers/1985.pdf},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
booktitle = {XIV Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL 2019)},
abstract = {En los nuevos paradigmas de movilidad surgidos durante los \'{u}ltimos a\~{n}os y en aquellos a\'{u}n por llegar ha quedado patente la necesidad de modernizar la infraestructura viaria y los elementos de se\~{n}alizaci\'{o}n y gesti\'{o}n del tr\'{a}fico. En el presente trabajo se presenta una propuesta para esta nueva generaci\'{o}n de dispositivos de gesti\'{o}n del tr\'{a}fico: un prototipo de sem\'{a}foro inteligente conectado que implementa diversas medidas de seguridad. Adem\'{a}s de las tradicionales se\~{n}ales luminosas, los usuarios de la v\'{i}a pueden conocer a trav\'{e}s de sus dispositivos el estado del sem\'{a}foro, adem\'{a}s de otra informaci\'{o}n complementaria a trav\'{e}s de la difusi\'{o}n de mensajes BLE firmados con criptograf\'{i}a de curva el\'{i}ptica. A su vez, el sem\'{a}foro puede ser gestionado remotamente a trav\'{e}s de la tecnolog\'{i}a LTE Cat M1 protegida por TLS. Esto abre la puerta, entre otros, a facilitar el tr\'{a}nsito de los veh\'{i}culos de emergencia cuando estos se acercan a un cruce o modificar el tiempo de los estados del ciclo en funci\'{o}n de las necesidades del tr\'{a}fico.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Daniel Morales, Isaac Agudo
Prueba de concepto de Autoridad de Certificación usando Computación Segura Multiparte
In: XIV Jornadas de Ingeniería Telemática, pp. 50-53, Zaragoza, 2019, ISBN: 978-84-09-21112-8.
@inproceedings{morales2019,
title = {Prueba de concepto de Autoridad de Certificaci\'{o}n usando Computaci\'{o}n Segura Multiparte},
author = {Daniel Morales and Isaac Agudo},
url = {/wp-content/papers/morales2019.pdf},
doi = {10.26754/uz.978-84-09-21112-8},
isbn = {978-84-09-21112-8},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
booktitle = {XIV Jornadas de Ingenier\'{i}a Telem\'{a}tica},
pages = {50-53},
address = {Zaragoza},
abstract = {Este trabajo pretende analizar el paradigma de la Computaci\'{o}n Segura Multiparte y sus posibles aplicaciones en el campo de la criptograf\'{i}a. Se plantea como modelo alternativo, mas escalable y seguro al uso de m\'{o}dulos hardware de seguridad para aplicaciones que requieran de Terceras Partes Confiables. Concretamente, se ha integrado un protocolo de criptograf\'{i}a RSA multiparte con la librer\'{i}a certbuilder, para la creaci\'{o}n de certificados X.509. De esta forma se asegura que la creaci\'{o}n de los certificados ra\'{i}z de la Infraestructura de Clave Publica se realiza de forma que la generaci\'{o}n de claves y firma de este se ejecute \'{i}ntegramente sobre el sistema multiparte, con un modelo de tres partes que trabaja con circuitos aritm\'{e}ticos, sin que ninguna de ellas, de forma aislada, tenga posibilidad de comprometer la clave privada correspondiente. Para comprobar la viabilidad del sistema se han realizado pruebas de generaci\'{o}n de certificados con diferentes longitudes de clave, siendo el proceso determinante la creaci\'{o}n de las claves. Los elevados tiempos hacen que una aplicaci\'{o}n como esta no sea asumible en otros escenarios, pero creemos que para el caso de la creaci\'{o}n de los certificados ra\'{i}z de una infraestructura de clave p\'{u}blica las garant\'{i}as avanzadas de seguridad compensan el tiempo extra.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Mark Manulis, Cristina Alcaraz, Javier Lopez
Enhancing Security and Dependability of Industrial Networks with Opinion Dynamics
In: European Symposium on Research in Computer Security (ESORICS2019), pp. 263-280, 2019.
BibTeX | Links:
@inproceedings{RubioESORICS2019,
title = {Enhancing Security and Dependability of Industrial Networks with Opinion Dynamics},
author = {Juan E. Rubio and Mark Manulis and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/RubioESORICS2019.pdf},
doi = {10.1007/978-3-030-29962-0_13},
year = {2019},
date = {2019-09-01},
urldate = {2019-09-01},
booktitle = {European Symposium on Research in Computer Security (ESORICS2019)},
volume = {11736},
pages = {263-280},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Raúl Ocaña, Isaac Agudo
Comunicaciones VoIP cifradas usando Intel SGX
In: V Jornadas Nacionales de Investigación en Ciberseguridad (JNIC), 2019.
@inproceedings{1978,
title = {Comunicaciones VoIP cifradas usando Intel SGX},
author = {Ra\'{u}l Oca\~{n}a and Isaac Agudo},
url = {/wp-content/papers/1978.pdf},
year = {2019},
date = {2019-06-01},
urldate = {2019-06-01},
booktitle = {V Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC)},
abstract = {Cada d\'{i}a es m\'{a}s frecuente encontrar servicios en internet gestionados desde plataformas online y con la expansi\'{o}n de la tecnolog\'{i}a IoT, los smartphones, las smartTV y otros tantos dispositivos: la autenticaci\'{o}n, la distribuci\'{o}n y al fin y al cabo, la comunicaci\'{o}n entre extremos puede verse seriamente comprometida si dicha plataforma es atacada. La inclusi\'{o}n de nuevas medidas de seguridad en este tipo de ecosistemas requiere de un cambios sustancial de la arquitectura subyacente en muchos casos, por lo que su avance es lento.
En este trabajo se trata de forma concreta el desarrollo de una alternativa OpenSource a uno de estos servicios, la telefon\'{i}a IP (VoIP), que esta expandi\'{e}ndose cada d\'{i}a m\'{a}s, empezando por redes locales y privadas y llegando a grandes centralitas de conmutaci\'{o}n de tele operadoras, consiguiendo as\'{i} una transmisi\'{o}n de voz segura extremo a extremo transparente para los servidores VoIP, que no requiera modificar la infraestructura subyacente.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
En este trabajo se trata de forma concreta el desarrollo de una alternativa OpenSource a uno de estos servicios, la telefonía IP (VoIP), que esta expandiéndose cada día más, empezando por redes locales y privadas y llegando a grandes centralitas de conmutación de tele operadoras, consiguiendo así una transmisión de voz segura extremo a extremo transparente para los servidores VoIP, que no requiera modificar la infraestructura subyacente.

Davide Ferraris, Carmen Fernandez-Gago, Joshua Daniel, Javier Lopez
A Segregated Architecture for a Trust-based Network of Internet of Things
In: IEEE Consumer Communications & Networking Conference 2019, IEEE IEEE, Las Vegas (USA), 2019.
@inproceedings{1780,
title = {A Segregated Architecture for a Trust-based Network of Internet of Things},
author = {Davide Ferraris and Carmen Fernandez-Gago and Joshua Daniel and Javier Lopez},
url = {/wp-content/papers/1780.pdf
https://ieeexplore.ieee.org/document/8651703},
doi = {10.1109/CCNC.2019.8651703},
year = {2019},
date = {2019-03-01},
urldate = {2019-03-01},
booktitle = {IEEE Consumer Communications \& Networking Conference 2019},
publisher = {IEEE},
address = {Las Vegas (USA)},
organization = {IEEE},
abstract = {With the ever-increasing number of smart home devices, the issues related to these environments are also growing. With an ever-growing attack surface, there is no standard way to protect homes and their inhabitants from new threats. The inhabitants are rarely aware of the increased security threats that they are exposed to and how to manage them. To tackle this problem, we propose a solution based on segmented architectures similar to the ones used in industrial systems. In this approach, the smart home is segmented into various levels, which can broadly be categorised into an inner level and external level. The external level is protected by a firewall that checks the communication from/to the Internet to/from the external devices. The internal level is protected by an additional firewall that filters the information and the communications between the external and the internal devices. This segmentation guarantees a trusted environment between the entities belonging to the internal network. In this paper, we propose an adaptive trust model that checks the behaviour of the entities and, through this model, in case the entities violate trust rules they can be put in quarantine or banned from the network.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Davide Ferraris, Daniel Bastos, Carmen Fernandez-Gago, Fadi El-Moussa, Javier Lopez
An Analysis of Trust in Smart Home Devices
In: The 20th World Conference on Information Security Applications: WISA-Workshop 2019, Springer Springer, Jeju Island, Korea, 2019.
@inproceedings{1814,
title = {An Analysis of Trust in Smart Home Devices},
author = {Davide Ferraris and Daniel Bastos and Carmen Fernandez-Gago and Fadi El-Moussa and Javier Lopez},
url = {/wp-content/papers/1814.pdf},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
booktitle = {The 20th World Conference on Information Security Applications: WISA-Workshop 2019},
publisher = {Springer},
address = {Jeju Island, Korea},
organization = {Springer},
abstract = {In recent times, smart home devices like Amazon Echo and Google Home have reached mainstream popularity. These devices are intrinsically intrusive, being able to access user’s personal information. There are growing concerns about indiscriminate data collection and invasion of user privacy in smart home devices. Improper trust assumptions and security controls can lead to unauthorized access of the devices, which can have severe consequences (i.e. safety risks). In this paper, we analysed the behaviour of smart home devices with respect to trust relationships. We set up a smart home environment to evaluate how trust is built and managed. Then, we performed a number of interaction tests with different types of users (i.e. owner, guests). As a result, we were able to assess the effectiveness of the provided security controls and identify some relevant security issues. To address them, we defined a trust model and proposed a solution based on it for securing smart home devices.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Antonio Acien, Ana Nieto, Gerardo Fernandez, Javier Lopez
Definición de procedimientos para fabricar honeypots IoT basados en criterios de búsqueda
In: XV Reunión Española sobre Criptología y Seguridad de la Información, Granada (España), 2018, ISBN: 978-84-09-02463-6.
@inproceedings{1706,
title = {Definici\'{o}n de procedimientos para fabricar honeypots IoT basados en criterios de b\'{u}squeda},
author = {Antonio Acien and Ana Nieto and Gerardo Fernandez and Javier Lopez},
url = {/wp-content/papers/1706.pdf},
isbn = {978-84-09-02463-6},
year = {2018},
date = {2018-10-01},
urldate = {2018-10-01},
booktitle = {XV Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n},
address = {Granada (Espa\~{n}a)},
abstract = {Con la revoluci\'{o}n tecnol\'{o}gica que ha supuesto la Internet de las Cosas (Internet of Things, IoT) se han presentado escenarios donde la preocupaci\'{o}n por la seguridad en dicho entorno es cada vez m\'{a}s relevante. Est\'{a}n comenzando a surgir vulnerabilidades en varios dispositivos, y los sistemas trampa son una excelente manera de lidiar con este problema. En este trabajo se analizan soluciones para honeypots en el entorno IoT (y en otros que se puedan adaptar) para sentar las bases de una metodolog\'{i}a que permita el despliegue de honeypots IoT.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Antonio Acien, Ana Nieto, Gerardo Fernandez, Javier Lopez
A comprehensive methodology for deploying IoT honeypots
In: 15th International Conference on Trust, Privacy and Security in Digital Business (TrustBus 2018), pp. 229–243, Springer Nature Switzerland AG Springer Nature Switzerland AG, Regensburg (Germany), 2018.
@inproceedings{1701,
title = {A comprehensive methodology for deploying IoT honeypots},
author = {Antonio Acien and Ana Nieto and Gerardo Fernandez and Javier Lopez},
url = {/wp-content/papers/1701.pdf},
doi = {10.1007/978-3-319-98385-1_16},
year = {2018},
date = {2018-09-01},
urldate = {2018-09-01},
booktitle = {15th International Conference on Trust, Privacy and Security in Digital Business (TrustBus 2018)},
volume = {LNCS 11033},
pages = {229\textendash243},
publisher = {Springer Nature Switzerland AG},
address = {Regensburg (Germany)},
organization = {Springer Nature Switzerland AG},
abstract = {Recent news have raised concern regarding the security on the IoT field. Vulnerabilities in devices are arising and honeypots are an excellent way to cope with this problem. In this work, current solutions for honeypots in the IoT context, and other solutions adaptable to it are analyzed in order to set the basis for a methodology that allows deployment of IoT honeypot.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Rodrigo Roman, Javier Lopez
Analysis of cybersecurity threats in Industry 4.0: the case of intrusion detection
In: The 12th International Conference on Critical Information Infrastructures Security, pp. 119-130, Springer Springer, 2018.
BibTeX | Links:
@inproceedings{1666,
title = {Analysis of cybersecurity threats in Industry 4.0: the case of intrusion detection},
author = {Juan E. Rubio and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/1666.pdf},
year = {2018},
date = {2018-08-01},
urldate = {2018-08-01},
booktitle = {The 12th International Conference on Critical Information Infrastructures Security},
volume = {10707},
pages = {119-130},
publisher = {Springer},
organization = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Antonio Acien, Ana Nieto, Javier Lopez
Analyzing cross-platform attacks: towards a three-actor approach
In: The 16th IEEE International Conference on Dependable, Autonomic and Secure Computing (DASC 2018), pp. 536-543, 2018, ISBN: 978-1-5386-7518-2.
@inproceedings{1709,
title = {Analyzing cross-platform attacks: towards a three-actor approach},
author = {Antonio Acien and Ana Nieto and Javier Lopez},
url = {/wp-content/papers/1709.pdf},
doi = {10.1109/DASC/PiCom/DataCom/CyberSciTec.2018.00102},
isbn = {978-1-5386-7518-2},
year = {2018},
date = {2018-08-01},
urldate = {2018-08-01},
booktitle = {The 16th IEEE International Conference on Dependable, Autonomic and Secure Computing (DASC 2018)},
pages = {536-543},
abstract = {In the current telecommunications landscape, different devices, systems and platforms are constantly communicating with each other. This heterogeneous environment creates the perfect situation for attacks to pass from one platform to another. This is a particularly worrying scenario, because of the new technologies being used (such as network slicing in 5G), the increasing importance of connected devices in our lives (IoT), and the unpredictable consequences that an attack of this type could have. The current approaches in attack analysis do not take into account these sitations, and the attacker/victim paradigm usually followed may fall short when dealing with these attacks. Thus, in this paper, an architecture for the analysis of cross-platform attacks will be presented, aiming to help understand better this kind of threats and offering solutions to mitigate and track them.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ana Nieto, Antonio Acien, Javier Lopez
Capture the RAT: Proximity-based Attacks in 5G using the Routine Activity Theory
In: The 16th IEEE International Conference on Dependable, Autonomic and Secure Computing (DASC 2018), pp. 520-527, IEEE IEEE, Athens, Greece, 2018, ISBN: 978-1-5386-7518-2.
@inproceedings{CRAT2018,
title = {Capture the RAT: Proximity-based Attacks in 5G using the Routine Activity Theory},
author = {Ana Nieto and Antonio Acien and Javier Lopez},
url = {/wp-content/papers/CRAT2018.pdf
https://ieeexplore.ieee.org/document/8511943, },
doi = {10.1109/DASC/PiCom/DataCom/CyberSciTec.2018.00100},
isbn = {978-1-5386-7518-2},
year = {2018},
date = {2018-08-01},
urldate = {2018-08-01},
booktitle = {The 16th IEEE International Conference on Dependable, Autonomic and Secure Computing (DASC 2018)},
pages = {520-527},
publisher = {IEEE},
address = {Athens, Greece},
organization = {IEEE},
abstract = {The fifth generation of cellular networks (5G) will enable different use cases where security will be more critical than ever before (e.g. autonomous vehicles and critical IoT devices). Unfortunately, the new networks are being built on the certainty that security problems can not be solved in the short term. Far from reinventing the wheel, one of our goals is to allow security software developers to implement and test their reactive solutions for the capillary network of 5G devices. Therefore, in this paper a solution for analysing proximity-based attacks in 5G environments is modelled and tested using OMNET++. The solution, named CRAT, is able to decouple the security analysis from the hardware of the device with the aim to extend the analysis of proximity-based attacks to different use-cases in 5G. We follow a high-level approach, in which the devices can take the role of victim, offender and guardian following the principles of the routine activity theory.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Rodrigo Roman, Cristina Alcaraz, Yan Zhang
Tracking Advanced Persistent Threats in Critical Infrastructures through Opinion Dynamics
In: European Symposium on Research in Computer Security (ESORICS 2018), pp. 555-574, Springer Springer, Barcelona, Spain, 2018.
@inproceedings{RubioRomanAlcarazZhang2018,
title = {Tracking Advanced Persistent Threats in Critical Infrastructures through Opinion Dynamics},
author = {Juan E. Rubio and Rodrigo Roman and Cristina Alcaraz and Yan Zhang},
url = {/wp-content/papers/RubioRomanAlcarazZhang2018.pdf
https://link.springer.com/chapter/10.1007/978-3-319-99073-6_27, },
doi = {10.1007/978-3-319-99073-6_27},
year = {2018},
date = {2018-08-01},
urldate = {2018-08-01},
booktitle = {European Symposium on Research in Computer Security (ESORICS 2018)},
volume = {11098},
pages = {555-574},
publisher = {Springer},
address = {Barcelona, Spain},
organization = {Springer},
abstract = {Advanced persistent threats pose a serious issue for modern industrial environments, due to their targeted and complex attack vectors that are difficult to detect. This is especially severe in critical infrastructures that are accelerating the integration of IT technologies. It is then essential to further develop effective monitoring and response systems that ensure the continuity of business to face the arising set of cyber-security threats. In this paper, we study the practical applicability of a novel technique based on opinion dynamics, that permits to trace the attack throughout all its stages along the network by correlating different anomalies measured over time, thereby taking the persistence of threats and the criticality of resources into consideration. The resulting information is of essential importance to monitor the overall health of the control system and correspondingly deploy accurate response procedures.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto
An Overview of Proactive Forensic Solutions and its Applicability to 5G
In: IEEE 5G World Forum (5GWF), pp. 191-196, IEEE, Santa Clara (USA), 2018, ISBN: 978-1-5386-4982-4.
@inproceedings{Nieto5GWF,
title = {An Overview of Proactive Forensic Solutions and its Applicability to 5G},
author = {Ana Nieto},
url = {/wp-content/papers/Nieto5GWF.pdf},
doi = {10.1109/5GWF.2018.8516940},
isbn = {978-1-5386-4982-4},
year = {2018},
date = {2018-07-01},
urldate = {2018-07-01},
booktitle = {IEEE 5G World Forum (5GWF)},
pages = {191-196},
publisher = {IEEE},
address = {Santa Clara (USA)},
abstract = {This article analyses the state of the art of proactive forensic solutions and highlights the importance of preparing the 5G ecosystem to serve digital forensic purposes. The analysis considers the current 5G threat landscape from the ENISA report, and discusses how some of the attacks could be mitigated using proactive forensic mechanisms. In addition, the requirements for deploying proactive forensic solutions in 5G are classified, and analysed based on the specific threats against 5G.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Martin Kolar, Carmen Fernandez-Gago, Javier Lopez
Policy Languages and Their Suitability for Trust Negotiation
In: 32nd Annual IFIP WG 11.3 Conference on Data and Applications Security and Privacy XXXII, 2018, pp. 69-84, Springer, Cham Springer, Cham, Bergamo, Italy, 2018, ISBN: 978-3-319-95728-9.
@inproceedings{kolar2018,
title = {Policy Languages and Their Suitability for Trust Negotiation},
author = {Martin Kolar and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/kolar2018.pdf
https://link.springer.com/chapter/10.1007/978-3-319-95729-6_5},
doi = {10.1007/978-3-319-95729-6_5},
isbn = {978-3-319-95728-9},
year = {2018},
date = {2018-07-01},
urldate = {2018-07-01},
booktitle = {32nd Annual IFIP WG 11.3 Conference on Data and Applications Security and Privacy XXXII, 2018},
volume = {10980},
pages = {69-84},
publisher = {Springer, Cham},
address = {Bergamo, Italy},
organization = {Springer, Cham},
abstract = {Entities, such as people, companies, institutions, authorities and web sites live and exist in a conjoined world. In order to live and enjoy social benefits, entities need to share knowledge, resources and to cooperate together. The cooperation brings with it many new challenges and problems, among which one is the problem of trust. This area is also important for the Computer Science. When unfamiliar entities wish to cooperate, they do not know what to expect nor whether they can trust each other. Trust negotiation solves this problem by sequential exchanging credentials between entities, which have decided to establish a trust relationship in order to reach a common goal. Entities specify their own policies that handle a disclosure of confidential information to maintain their security and privacy. Policies are defined by means of a policy language. This paper aims to identify the most suitable policy language for trust negotiation. To do so, policy languages are analysed against a set of criteria for trust negotiation that are first established.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Antonio Acien, Ana Nieto, Javier Lopez
Modelo para la clasificación y análisis de ataques Cross-Platform
In: IV Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2018), Servicio Editorial de Mondragon Unibertsitatea Servicio Editorial de Mondragon Unibertsitatea, Donostia-San Sebastián (España), 2018, ISBN: 978-84-09-02697-5.
@inproceedings{1699,
title = {Modelo para la clasificaci\'{o}n y an\'{a}lisis de ataques Cross-Platform},
author = {Antonio Acien and Ana Nieto and Javier Lopez},
url = {/wp-content/papers/1699.pdf
http://2018.jnic.es/assets/Actas_JNIC2018.pdf},
isbn = {978-84-09-02697-5},
year = {2018},
date = {2018-06-01},
urldate = {2018-06-01},
booktitle = {IV Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2018)},
publisher = {Servicio Editorial de Mondragon Unibertsitatea},
address = {Donostia-San Sebasti\'{a}n (Espa\~{n}a)},
organization = {Servicio Editorial de Mondragon Unibertsitatea},
abstract = {Los ataques cross-platform suponen un serio desaf\'{i}o para los mecanismos de seguridad cuando los portadores de un ataque dirigido no son conscientes de su participacion en el mismo. Es por ello que, con dispositivos y tecnolog\'{i}as cada vez mas entrelazadas, en constante comunicaci\'{o}n, numerosos ataques pasan desapercibidos hasta que alcanzan su objetivo final. Estos nuevos escenarios hacen posible una v\'{i}a de transmision a tener en cuenta, y que se debe abordar cuanto antes, ya que sus consecuencias, especialmente en el panorama de telecomunicaciones actual, podr\'{i}an ser desoladoras. La rapida transmisi\'{o}n de estos ataques, y la dificultad que supone su prevencion, detecci\'{o}n y mitigaci\'{o}n antes de que se hagan efectivos, hacen que el problema sea particularmente preocupante. En este art\'{i}culo se presentar\'{a} una arquitectura para el analisis de los ataques cross-platform silenciosos, cuyo objetivo es ayudar a comprender mejor este tipo de amenazas y ofrecer soluciones que permitan mitigarlas y rastrearlas.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Davide Ferraris, Carmen Fernandez-Gago, Javier Lopez
A Trust-by-Design Framework for the Internet of Things
In: 2018 9th IFIP International Conference on New Technologies Mobility and Security (NTMS), IEEE IEEE, Paris, 2018, ISSN: 2157-4960.
@inproceedings{1684,
title = {A Trust-by-Design Framework for the Internet of Things},
author = {Davide Ferraris and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/1684.pdf
http://ieeexplore.ieee.org/document/8328674/},
doi = {10.1109/NTMS.2018.8328674},
issn = {2157-4960},
year = {2018},
date = {2018-04-01},
urldate = {2018-04-01},
booktitle = {2018 9th IFIP International Conference on New Technologies Mobility and Security (NTMS)},
publisher = {IEEE},
address = {Paris},
organization = {IEEE},
abstract = {The Internet of Things (IoT) is an environment of interconnected entities, that are identifiable, usable and controllable via the Internet. Trust is necessary in a system such as IoT as the entities involved should know the effect of interacting with other entities. Moreover, the entities must also be able to trust a system to reliably use it. An IoT system is composed of different entities from different vendors, each of them with a different purpose and a different lifecycle. So considering trust in the whole IoT system lifecycle is useful and necessary to guarantee a good service for the whole system. The heterogeneity and dynamicity of this field make it difficult to ensure trust in IoT. We propose a trust by design framework for including trust in the development of an IoT entity considering all the phases of the life-cycle. It is composed of the K-Model and transversal activities.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Cristina Alcaraz, Javier Lopez
Addressing Security in OCPP: Protection Against Man-in-the-Middle Attacks
In: 9th IFIP International Conference on New Technologies, Mobility & Security, 2018.
BibTeX | Links:
@inproceedings{1692,
title = {Addressing Security in OCPP: Protection Against Man-in-the-Middle Attacks},
author = {Juan E. Rubio and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1692.pdf},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
booktitle = {9th IFIP International Conference on New Technologies, Mobility \& Security},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Xueou Wang, Xiaolu Hou, Ruben Rios, Per Hallgren, Nils Ole Tippenhauer, Martin Ochoa
Location Proximity Attacks against Mobile Targets: Analytical Bounds and Attacker Strategies
In: 23rd European Symposium on Research in Computer Security (ESORICS 2018), pp. 373-392, Springer Springer, Barcelona, 2018, ISBN: 978-3-319-98988-4.
@inproceedings{rios2018mob,
title = {Location Proximity Attacks against Mobile Targets: Analytical Bounds and Attacker Strategies},
author = {Xueou Wang and Xiaolu Hou and Ruben Rios and Per Hallgren and Nils Ole Tippenhauer and Martin Ochoa},
url = {/wp-content/papers/rios2018mob.pdf},
doi = {10.1007/978-3-319-98989-1},
isbn = {978-3-319-98988-4},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
booktitle = {23rd European Symposium on Research in Computer Security (ESORICS 2018)},
volume = {11099},
pages = {373-392},
publisher = {Springer},
address = {Barcelona},
organization = {Springer},
series = {LNCS},
abstract = {Location privacy has mostly focused on scenarios where users remain static. However, investigating scenarios where the victims present a particular mobility pattern is more realistic. In this paper, we consider abstract attacks on services that provide location information on other users in the proximity. In that setting, we quantify the required effort of the attacker to localize a particular mobile victim. We prove upper and lower bounds for the effort of an optimal attacker. We experimentally show that a emphLinear Jump Strategy (LJS) practically achieves the upper bounds for almost uniform initial distributions of victims. To improve performance for less uniform distributions known to the attacker, we propose a emphGreedy Updating Attack Strategy (GUAS). Finally, we derive a realistic mobility model from a real-world dataset and discuss the performance of our strategies in that setting.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Michael Egorov, MacLane Wilkison, David Nuñez
NuCypher KMS: Decentralized key management system
In: Blockchain Protocol Analysis and Security Engineering 2018, 2018.
@inproceedings{egorov2018nucypher,
title = {NuCypher KMS: Decentralized key management system},
author = {Michael Egorov and MacLane Wilkison and David Nu\~{n}ez},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
booktitle = {Blockchain Protocol Analysis and Security Engineering 2018},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jamal Toutouh, Antonio Muñoz, Sergio Nesmachnow
Evolution Oriented Monitoring Oriented to Security Properties for Cloud Applications
In: Proceedings of the 13th International Conference on Availability, Reliability and Security, Association for Computing Machinery, Hamburg, Germany, 2018, ISBN: 9781450364485.
@inproceedings{munoz2018,
title = {Evolution Oriented Monitoring Oriented to Security Properties for Cloud Applications},
author = {Jamal Toutouh and Antonio Mu\~{n}oz and Sergio Nesmachnow},
url = {/wp-content/papers/munoz2018.pdf},
doi = {10.1145/3230833.3232856},
isbn = {9781450364485},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
booktitle = {Proceedings of the 13th International Conference on Availability, Reliability and Security},
publisher = {Association for Computing Machinery},
address = {Hamburg, Germany},
series = {ARES '18},
abstract = {Internet is changing from an information space to a dynamic computing space. Data distribution and remotely accessible software services, dynamism, and autonomy are prime attributes. Cloud technology offers a powerful and fast growing approach to the provision of infrastructure (platform and software services) avoiding the high costs of owning, operating, and maintaining the computational infrastructures required for this purpose. Nevertheless, cloud technology still raises concerns regarding security, privacy, governance, and compliance of data and software services offered through it. Concerns are due to the difficulty to verify security properties of the different types of applications and services available through cloud technology, the uncertainty of their owners and users about the security of their services, and the applications based on them, once they are deployed and offered through a cloud. This work presents an innovative and novel evolution-oriented, cloud-specific monitoring model (including an architecture and a language) that aim at helping cloud application developers to design and monitor the behavior and functionality of their applications in a cloud environment.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Cristina Alcaraz, Javier Lopez
Preventing Advanced Persistent Threats in Complex Control Networks
In: European Symposium on Research in Computer Security, pp. 402-418, 22nd European Symposium on Research in Computer Security (ESORICS 2017) 22nd European Symposium on Research in Computer Security (ESORICS 2017), 2017.
BibTeX | Links:
@inproceedings{RubioAlcarazLopez2017ESORICS,
title = {Preventing Advanced Persistent Threats in Complex Control Networks},
author = {Juan E. Rubio and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/RubioAlcarazLopez2017ESORICS.pdf},
year = {2017},
date = {2017-09-01},
urldate = {2017-09-01},
booktitle = {European Symposium on Research in Computer Security},
volume = {10493},
pages = {402-418},
publisher = {22nd European Symposium on Research in Computer Security (ESORICS 2017)},
organization = {22nd European Symposium on Research in Computer Security (ESORICS 2017)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ana Nieto, Ruben Rios, Javier Lopez
Digital Witness and Privacy in IoT: Anonymous Witnessing Approach
In: 16th IEEE International Conference On Trust, Security And Privacy In Computing And Communications (TrustCom 2017), pp. 642-649, IEEE IEEE, Sydney (Australia), 2017, ISSN: 2324-9013.
@inproceedings{1654,
title = {Digital Witness and Privacy in IoT: Anonymous Witnessing Approach},
author = {Ana Nieto and Ruben Rios and Javier Lopez},
url = {/wp-content/papers/1654.pdf},
doi = {10.1109/Trustcom/BigDataSE/ICESS.2017.295},
issn = {2324-9013},
year = {2017},
date = {2017-08-01},
urldate = {2017-08-01},
booktitle = {16th IEEE International Conference On Trust, Security And Privacy In Computing And Communications (TrustCom 2017)},
pages = {642-649},
publisher = {IEEE},
address = {Sydney (Australia)},
organization = {IEEE},
abstract = {The emphdigital witness approach defines the collaboration between IoT devices - from wearables to vehicles - to provide digital evidence through a emphDigital Chain of Custody to an authorised entity. As one of the cores of the digital witness, emphbinding credentials unequivocally identify the user behind the digital witness. The objective of this article is to perform a critical analysis of the digital witness approach from the perspective of privacy, and to propose solutions that help include some notions of privacy in the scheme (for those cases where it is possible). In addition, emphdigital anonymous witnessing as a tradeoff mechanism between the original approach and privacy requirements is proposed. This is a clear challenge in this context given the restriction that the identities of the links in the digital chain of custody should be known.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Ruben Rios, Javier Lopez
A Methodology for Privacy-Aware IoT-Forensics
In: 16th IEEE International Conference On Trust, Security And Privacy In Computing And Communications (TrustCom 2017), pp. 626-633, IEEE IEEE, Sydney (Australia), 2017, ISSN: 2324-9013.
@inproceedings{1652,
title = {A Methodology for Privacy-Aware IoT-Forensics},
author = {Ana Nieto and Ruben Rios and Javier Lopez},
url = {/wp-content/papers/1652.pdf},
doi = {10.1109/Trustcom/BigDataSE/ICESS.2017.293},
issn = {2324-9013},
year = {2017},
date = {2017-08-01},
urldate = {2017-08-01},
booktitle = {16th IEEE International Conference On Trust, Security And Privacy In Computing And Communications (TrustCom 2017)},
pages = {626-633},
publisher = {IEEE},
address = {Sydney (Australia)},
organization = {IEEE},
abstract = {The Internet of Things (IoT) brings new challenges to digital forensics. Given the number and heterogeneity of devices in such scenarios, it bring extremely difficult to carry out investigations without the cooperation of individuals. Even if they are not directly involved in the offense, their devices can yield digital evidence that might provide useful clarification in an investigation. However, when providing such evidence they may leak sensitive personal information. This paper proposes PRoFIT; a new model for IoT-forensics that takes privacy into consideration by incorporating the requirements of ISO/IEC 29100:2011 throughout the investigation life cycle. PRoFIT is intended to lay the groundwork for the voluntary cooperation of individuals in cyber crime investigations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Gerardo Fernandez, Ana Nieto, Javier Lopez
Modeling Malware-driven Honeypots
In: 14th International Conference On Trust, Privacy & Security In Digital Business (TrustBus 2017), pp. 130-144, Springer International Publishing Springer International Publishing, Lyon (France), 2017, ISBN: 978-3-319-64482-0.
@inproceedings{1656,
title = {Modeling Malware-driven Honeypots},
author = {Gerardo Fernandez and Ana Nieto and Javier Lopez},
url = {/wp-content/papers/1656.pdf
https://link.springer.com/chapter/10.1007/978-3-319-64483-7_9, },
doi = {10.1007/978-3-319-64483-7_9},
isbn = {978-3-319-64482-0},
year = {2017},
date = {2017-08-01},
urldate = {2017-08-01},
booktitle = {14th International Conference On Trust, Privacy \& Security In Digital Business (TrustBus 2017)},
volume = {10442},
pages = {130-144},
publisher = {Springer International Publishing},
address = {Lyon (France)},
organization = {Springer International Publishing},
abstract = {In this paper we propose the Hogney architecture for the deployment of emphmalware-driven honeypots. This new concept refers to honeypots that have been dynamically configured according to the environment expected by malware. The adaptation mechanism designed here is built on services that offer up-to-date and relevant emphintelligence information on current threats. Thus, the Hogney architecture takes advantage of recent emphIndicators Of Compromise (IOC) and information about suspicious activity currently being studied by analysts. The information gathered from these services is then used to adapt honeypots to fulfill malware requirements, inviting them to unleash their full strength.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Nuñez, Isaac Agudo, Javier Lopez
The fallout of key compromise in a proxy-mediated key agreement protocol
In: 31st Annual IFIP WG 11.3 Conference on Data and Applications Security and Privacy (DBSec’17), pp. 453-472, Springer Springer, Philadelphia, USA, 2017, ISBN: 978-3-319-61176-1.
@inproceedings{nunez2017fallout,
title = {The fallout of key compromise in a proxy-mediated key agreement protocol},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2017fallout.pdf},
doi = {10.1007/978-3-319-61176-1_25},
isbn = {978-3-319-61176-1},
year = {2017},
date = {2017-07-01},
urldate = {2017-07-01},
booktitle = {31st Annual IFIP WG 11.3 Conference on Data and Applications Security and Privacy (DBSec’17)},
volume = {LNCS 10359},
pages = {453-472},
publisher = {Springer},
address = {Philadelphia, USA},
organization = {Springer},
abstract = {In this paper, we analyze how key compromise affects the protocol by Nguyen et al. presented at ESORICS 2016, an authenticated key agreement protocol mediated by a proxy entity, restricted to only symmetric encryption primitives and intended for IoT environments. This protocol uses long-term encryption tokens as intermediate values during encryption and decryption procedures, which implies that these can be used to encrypt and decrypt messages without knowing the cor- responding secret keys. In our work, we show how key compromise (or even compromise of encryption tokens) allows to break forward secu- rity and leads to key compromise impersonation attacks. Moreover, we demonstrate that these problems cannot be solved even if the affected user revokes his compromised secret key and updates it to a new one. The conclusion is that this protocol cannot be used in IoT environments, where key compromise is a realistic risk.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Gerardo Fernandez, Ana Nieto
Configuración de honeypots adaptativos para análisis de malware
In: III Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2017), pp. 91-98, Servicio de Publicaciones de la URJC Servicio de Publicaciones de la URJC, Madrid (Spain), 2017, ISBN: 978-84-608-4659-8.
@inproceedings{1650,
title = {Configuraci\'{o}n de honeypots adaptativos para an\'{a}lisis de malware},
author = {Gerardo Fernandez and Ana Nieto},
url = {/wp-content/papers/1650.pdf
https://eciencia.urjc.es/handle/10115/14540},
isbn = {978-84-608-4659-8},
year = {2017},
date = {2017-06-01},
urldate = {2017-06-01},
booktitle = {III Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2017)},
pages = {91-98},
publisher = {Servicio de Publicaciones de la URJC},
address = {Madrid (Spain)},
organization = {Servicio de Publicaciones de la URJC},
abstract = {Este trabajo propone una arquitectura de despliegue de honeypots adaptativos, configurados din\'{a}micamente a partir de los requisitos del malware que intenta infectar los servicios trampa. A diferencia de otros trabajos sobre honeypots adaptativos, los mecanismos de adaptabilidad aqu\'{i} dise\~{n}ados tomar\'{a}n como base informaci\'{o}n de inteligencia sobre amenazas actuales, indicadores de compromiso (IOCs) conocidos, as\'{i} como informaci\'{o}n de actividades sospechosas actualmente en estudio por los analistas. Este conocimiento ser\'{a} empleado para configurar honeypots de manera din\'{a}mica, permitiendo satisfacer los requisitos necesarios para que el malware pueda desplegar toda su operativa.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Rodrigo Roman, Jose A. Onieva, Javier Lopez
From Smog to Fog: A Security Perspective
In: 2nd IEEE International Conference on Fog and Edge Mobile Computing (FMEC 2017), pp. 56-61, IEEE Computer Society IEEE Computer Society, Valencia, Spain. 8-11 May 2017, 2017, ISBN: 978-1-5386-2859-1.
@inproceedings{Ruben2017smog,
title = {From Smog to Fog: A Security Perspective},
author = {Ruben Rios and Rodrigo Roman and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/Ruben2017smog.pdf},
doi = {10.1109/FMEC.2017.7946408},
isbn = {978-1-5386-2859-1},
year = {2017},
date = {2017-06-01},
urldate = {2017-06-01},
booktitle = {2nd IEEE International Conference on Fog and Edge Mobile Computing (FMEC 2017)},
pages = {56-61},
publisher = {IEEE Computer Society},
address = {Valencia, Spain. 8-11 May 2017},
organization = {IEEE Computer Society},
abstract = {Cloud computing has some major limitations that hinder its application to some specific scenarios (e.g., Industrial IoT, and remote surgery) where there are particularly stringent requirements, such as extremely low latency. Fog computing is a specialization of the Cloud that promises to overcome the aforementioned limitations by bringing the Cloud closer to end-users. Despite its potential benefits, Fog Computing is still a developing paradigm which demands further research, especially on security and privacy aspects. This is precisely the focus of this paper: to make evident the urgent need for security mechanisms in Fog computing, as well as to present a research strategy with the necessary steps and processes that are being undertaken within the scope of the SMOG project, in order to enable a trustworthy and resilient Fog ecosystem.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Nuñez, Isaac Agudo, Michael Egorov, MacLane Wilkison
Sistema de Acceso Delegado a Información Cifrada para Apache Hadoop
In: III Jornadas Nacionales de Investigación en Ciberseguridad, pp. 174-175, URJC URJC, Madrid, 2017, ISBN: 978-84-608-4659-8.
@inproceedings{nunez2017sistema,
title = {Sistema de Acceso Delegado a Informaci\'{o}n Cifrada para Apache Hadoop},
author = {David Nu\~{n}ez and Isaac Agudo and Michael Egorov and MacLane Wilkison},
url = {http://hdl.handle.net/10115/14540},
isbn = {978-84-608-4659-8},
year = {2017},
date = {2017-06-01},
urldate = {2017-06-01},
booktitle = {III Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad},
pages = {174-175},
publisher = {URJC},
address = {Madrid},
organization = {URJC},
abstract = {En este art\'{i}culo presentamos un sistema que permite delegaci\'{o}n de acceso a informaci\'{o}n cifrada para Apache Hadoop, de forma segura y transparente al usuario. Para ello usamos t\'{e}cnicas criptogr\'{a}ficas avanzadas basadas en el recifrado delegado. Con este sistema, es posible almacenar en Hadoop los datos de forma cifrada y delegar de forma segura el acceso a los nodos de computaci\'{o}n. El funcionamiento es transparente ya que se integra con la capa del sistema de ficheros nativa HDFS. Adem\'{a}s, el recifrado delegado permite hacer rotaci\'{o}n de claves de cifrado de forma segura y r\'{a}pida.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, David Nuñez, Javier Lopez
Query Privacy in Sensing-as-a-Service Platforms
In: Sabrina De Capitani Vimercati, Fabio Martinelli (Ed.): 32nd International Conference on ICT Systems Security and Privacy Protection (IFIP SEC 2017), pp. 141–154, Springer Springer, Roma, Italy, 2017.
@inproceedings{Rios2017query,
title = {Query Privacy in Sensing-as-a-Service Platforms},
author = {Ruben Rios and David Nu\~{n}ez and Javier Lopez},
editor = {Sabrina De Capitani Vimercati and Fabio Martinelli},
url = {/wp-content/papers/Rios2017query.pdf},
doi = {10.1007/978-3-319-58469-0_10},
year = {2017},
date = {2017-05-01},
urldate = {2017-05-01},
booktitle = {32nd International Conference on ICT Systems Security and Privacy Protection (IFIP SEC 2017)},
volume = {502},
pages = {141\textendash154},
publisher = {Springer},
address = {Roma, Italy},
organization = {Springer},
series = {IFIP Advances in Information and Communication Technology (AICT)},
abstract = {The Internet of Things (IoT) promises to revolutionize the way we interact with the physical world. Even though this paradigm is still far from being completely realized, there already exist Sensing-as-a-Service (S^2aaS) platforms that allow users to query for IoT data. While this model offers tremendous benefits, it also entails increasingly challenging privacy issues. In this paper, we concentrate on the protection of user privacy when querying sensing devices through a semi-trusted S^2aaS platform. In particular, we build on techniques inspired by proxy re-encryption and k-anonymity to tackle two intertwined problems, namely query privacy and query confidentiality. The feasibility of our solution is validated both analytically and empirically.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Cristina Alcaraz, Rodrigo Roman, Javier Lopez
Analysis of Intrusion Detection Systems in Industrial Ecosystems
In: 14th International Conference on Security and Cryptography (SECRYPT 2017), pp. 116-128, SciTePress SciTePress, 2017, ISBN: 978-989-758-259-2.
BibTeX | Links:
@inproceedings{1662,
title = {Analysis of Intrusion Detection Systems in Industrial Ecosystems},
author = {Juan E. Rubio and Cristina Alcaraz and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/1662.pdf},
doi = {10.5220/0006426301160128},
isbn = {978-989-758-259-2},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
booktitle = {14th International Conference on Security and Cryptography (SECRYPT 2017)},
volume = {6},
pages = {116-128},
publisher = {SciTePress},
organization = {SciTePress},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Jesús Rodriguez, Rodrigo Roman, Juan E. Rubio
Estado y Evolución de la Detección de Intrusiones en los Sistemas Industriales
In: III Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2017), 2017.
@inproceedings{1653,
title = {Estado y Evoluci\'{o}n de la Detecci\'{o}n de Intrusiones en los Sistemas Industriales},
author = {Cristina Alcaraz and Jes\'{u}s Rodriguez and Rodrigo Roman and Juan E. Rubio},
url = {/wp-content/papers/1653.pdf},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
booktitle = {III Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2017)},
abstract = {Debido a la necesidad de proteger los sistemas industriales ante amenazas, se hace necesario comprender cual es el verdadero alcance de los mecanismos capaces de detectar potenciales anomal\'{i}as e intrusiones. Es por tanto el objetivo de este art\'{i}culo analizar el estado y la evoluci\'{o}n, tanto acad\'{e}mica como industrial, de los mecanismos de detecci\'{o}n de intrusiones en este campo, as\'{i} como estudiar su aplicabilidad actual y futura.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Ruben Rios, Javier Lopez
PRoFIT: modelo forense-IoT con integración de requisitos de privacidad
In: XIII Jornadas de Ingeniería Telemática (JITEL 2017), pp. 302-309, Editorial Universitat Politècnica de València Editorial Universitat Politècnica de València, Valencia, 2017, ISBN: 978-84-9048-595-8.
BibTeX | Links:
@inproceedings{1655,
title = {PRoFIT: modelo forense-IoT con integraci\'{o}n de requisitos de privacidad},
author = {Ana Nieto and Ruben Rios and Javier Lopez},
url = {/wp-content/papers/1655.pdf
http://jlloret.webs.upv.es/jitel2017/files/ACTASJITEL2017.pdf},
doi = {10.4995/JITEL2017.2017.7061},
isbn = {978-84-9048-595-8},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
booktitle = {XIII Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL 2017)},
volume = {Libro de actas},
pages = {302-309},
publisher = {Editorial Universitat Polit\`{e}cnica de Val\`{e}ncia},
address = {Valencia},
organization = {Editorial Universitat Polit\`{e}cnica de Val\`{e}ncia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Ruben Rios
Requisitos y soluciones de privacidad para la testificación digital
In: III Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2017), pp. 51-58, Servicio de Publicaciones de la URJC Servicio de Publicaciones de la URJC, Madrid (Spain), 2017, ISBN: 978-84-608-4659-8.
BibTeX | Links:
@inproceedings{1648,
title = {Requisitos y soluciones de privacidad para la testificaci\'{o}n digital},
author = {Ana Nieto and Ruben Rios},
url = {/wp-content/papers/1648.pdf
https://eciencia.urjc.es/handle/10115/14540},
isbn = {978-84-608-4659-8},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
booktitle = {III Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2017)},
volume = {Actas del JNIC 2017},
pages = {51-58},
publisher = {Servicio de Publicaciones de la URJC},
address = {Madrid (Spain)},
organization = {Servicio de Publicaciones de la URJC},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Juan E. Rubio, Cristina Alcaraz, Javier Lopez
Selecting Privacy Solutions to Prioritise Control in Smart Metering Systems
In: The 11th International Conference on Critical Information Infrastructures Security, pp. 176-188, 2017.
@inproceedings{1600,
title = {Selecting Privacy Solutions to Prioritise Control in Smart Metering Systems},
author = {Juan E. Rubio and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1600.pdf},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
booktitle = {The 11th International Conference on Critical Information Infrastructures Security},
volume = {10242},
pages = {176-188},
abstract = {The introduction of the Smart Grid brings with it several benefits to society, because its bi-directional communication allows both users and utilities to have better control over energy usage. However, it also has some privacy issues with respect to the privacy of the customers when analysing their consumption data. In this paper we review the main privacy-preserving techniques that have been proposed and compare their efficiency, to accurately select the most appropriate ones for undertaking control operations. Both privacy and performance are essential for the rapid adoption of Smart Grid technologies.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Rodrigo Roman, Javier Lopez
Arquitectura funcional para la cadena de custodia digital en objetos de la IoT
In: XIV Reunión Española sobre Criptología y Seguridad de la Información, pp. 168-173, 2016, ISBN: 978-84-608-9470-4.
@inproceedings{1582,
title = {Arquitectura funcional para la cadena de custodia digital en objetos de la IoT},
author = {Ana Nieto and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/1582.pdf},
isbn = {978-84-608-9470-4},
year = {2016},
date = {2016-10-01},
urldate = {2016-10-01},
booktitle = {XIV Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n},
pages = {168-173},
abstract = {En la Internet de los Objetos (IoT, por sus siglas en ingl\'{e}s), los ataques pueden ser perpetrados desde dispositivos que enmascaran su rastro ayud\'{a}ndose de la densidad de objetos y usuarios. Actualmente la idea de que los dispositivos de usuario almacenan evidencias que pueden ser muy valiosas para frenar ataques es bien conocida. Sin embargo, la colaboraci\'{o}n de \'{e}stos para denunciar posibles abusos telem\'{a}ticos a\'{u}n est\'{a} por definir. Los testigos digitales son dispositivos concebidos para definir la participaci\'{o}n de dispositivos de usuario en una cadena de custodia digital. La idea es que las evidencias se generan, almacenan y transfieren siguiendo los requisitos marcados por las normas actuales (p.ej. UNE 71505), pero respetando las restricciones en recursos de los dispositivos. En este art\'{i}culo proponemos una arquitectura funcional para la implementaci\'{o}n del concepto de testigo digital en dispositivos heterog\'{e}neos de la IoT.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Javier Lopez
Evolución y nuevos desafios de privacidad en la Internet de las Cosas
In: XIV Reunión Española sobre Criptología y Seguridad de la Información, pp. 209-213, Mahón, Menorca, Islas Baleares, 2016.
@inproceedings{Rios2016a,
title = {Evoluci\'{o}n y nuevos desafios de privacidad en la Internet de las Cosas},
author = {Ruben Rios and Javier Lopez},
url = {/wp-content/papers/Rios2016a.pdf},
year = {2016},
date = {2016-10-01},
urldate = {2016-10-01},
booktitle = {XIV Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n},
pages = {209-213},
address = {Mah\'{o}n, Menorca, Islas Baleares},
abstract = {La Internet de las Cosas (en ingl\'{e}s, emphInternet of Things (IoT)) es una evoluci\'{o}n de la Internet tal y como lo conocemos. Esta nueva versi\'{o}n de Internet incorpora objetos de la vida cotidiana, rompiendo as\'{i} barrera de los digital y extendi\'{e}ndose al mundo f\'{i}sico. Estos objetos interactuar\'{a}n entre s\'{i} y con otras entidades tanto de manera local como remota, y estar\'{a}n dotados de cierta capacidad computacional y sensores para que sean conscientes de lo que ocurre en su entorno. Esto traer\'{a} consigo un sinf\'{i}n de posibilidades y nuevos servicios, pero tambi\'{e}n dar\'{a} lugar a nuevos y mayores riesgos de privacidad para los ciudadanos. En este art\'{i}culo, estudiamos los problemas de privacidad actuales de una de las tecnolog\'{i}as claves para el desarrollo de este prometedor paradigma, las redes de sensores, y analizamos como pueden evolucionar y surgir nuevos riesgos de privacidad al ser completamente integradas en la Internet.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Nuñez, Isaac Agudo, Javier Lopez
Nuevas nociones de seguridad y transformaciones genéricas para criptosistemas de recifrado delegado
In: XIV Reunión Española sobre Criptología y Seguridad de la Información, pp. 174-179, Mahón, Menorca, Islas Baleares, 2016, ISBN: 978-84-608-9470-4.
@inproceedings{nunez2016nuevas,
title = {Nuevas nociones de seguridad y transformaciones gen\'{e}ricas para criptosistemas de recifrado delegado},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2016nuevas.pdf},
isbn = {978-84-608-9470-4},
year = {2016},
date = {2016-10-01},
urldate = {2016-10-01},
booktitle = {XIV Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n},
pages = {174-179},
address = {Mah\'{o}n, Menorca, Islas Baleares},
abstract = {El recifrado delegado (emphproxy re-encryption) es un tipo de cifrado de clave p\'{u}blica que permite delegar la capacidad de transformar textos cifrados de una clave p\'{u}blica a otra, sin que se pueda obtener ninguna informaci\'{o}n sobre el mensaje subyacente. Por este motivo, representa un candidato natural para construir mecanismos criptogr\'{a}ficos de control de acceso. En este art\'{i}culo estudiamos algunos de los problemas de seguridad de este tipo de criptosistemas. En primer lugar, examinamos las nociones de seguridad e identificamos una nueva familia param\'{e}trica de modelos de ataque, que considera la disponibilidad tanto del or\'{a}culo de descifrado como de recifrado. En segundo lugar, estudiamos la aplicabilidad de transformaciones gen\'{e}ricas para mejorar la seguridad, centr\'{a}ndonos en la transformaci\'{o}n Fujisaki-Okamoto, y formulamos las condiciones que nos permiten aplicarla.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ruben Rios, Carmen Fernandez-Gago, Javier Lopez
Privacy-Aware Trust Negotiation
In: 12th International Workshop on Security and Trust Management (STM), pp. 98-105, Springer Springer, Heraklion, Crete, Greece, 2016, ISSN: 0302-9743.
@inproceedings{rios2016b,
title = {Privacy-Aware Trust Negotiation},
author = {Ruben Rios and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/rios2016b.pdf
http://link.springer.com/chapter/10.1007/978-3-319-46598-2_7, },
doi = {10.1007/978-3-319-46598-2 7},
issn = {0302-9743},
year = {2016},
date = {2016-09-01},
urldate = {2016-09-01},
booktitle = {12th International Workshop on Security and Trust Management (STM)},
volume = {LNCS 9871},
pages = {98-105},
publisher = {Springer},
address = {Heraklion, Crete, Greece},
organization = {Springer},
abstract = {Software engineering and information security have traditionally followed divergent paths but lately some efforts have been made to consider security from the early phases of the Software Development Life Cycle (SDLC). This paper follows this line and concentrates on the incorporation of trust negotiations during the requirements engineering phase. More precisely, we provide an extension to the SI* modelling language, which is further formalised using answer set programming specifications to support the automatic verification of the model and the detection of privacy conflicts caused by trust negotiations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Carmen Fernandez-Gago, Siani Pearson, Michela D’Errico, Rehab Alnemr, Tobias Pulls, Anderson Santana Oliveira
A4Cloud Workshop: Accountability in the Cloud
In: IFIP Sumer School 2015 on Privacy and Identity Management. Time for a Revolution?, pp. 61-78, AICT Series, Springer AICT Series, Springer, Edinburgh (United Kingdon), 2016.
@inproceedings{Ifip15,
title = {A4Cloud Workshop: Accountability in the Cloud},
author = {Carmen Fernandez-Gago and Siani Pearson and Michela D’Errico and Rehab Alnemr and Tobias Pulls and Anderson Santana Oliveira},
year = {2016},
date = {2016-07-01},
urldate = {2016-07-01},
booktitle = {IFIP Sumer School 2015 on Privacy and Identity Management. Time for a Revolution?},
volume = {476},
pages = {61-78},
publisher = {AICT Series, Springer},
address = {Edinburgh (United Kingdon)},
organization = {AICT Series, Springer},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Rodrigo Roman, Javier Lopez
Testigo digital: delegación vinculante de evidencias electrónicas para escenarios IoT
In: II Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2016), pp. 109-116, 2016, ISBN: 978-84-608-8070-7.
@inproceedings{1578,
title = {Testigo digital: delegaci\'{o}n vinculante de evidencias electr\'{o}nicas para escenarios IoT},
author = {Ana Nieto and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/1578.pdf
http://ucys.ugr.es/jnic2016/docs/ActasJNIC2016.pdf, },
isbn = {978-84-608-8070-7},
year = {2016},
date = {2016-06-01},
urldate = {2016-06-01},
booktitle = {II Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2016)},
pages = {109-116},
abstract = {En un mundo en el que los usuarios dependen cada vez m\'{a}s de sus dispositivos, \'{e}stos almacenan gran cantidad de datos y son una fuente muy valiosa de informaci\'{o}n sobre su entorno. Sin embargo, la heterogeneidad y la densidad de los objetos conectados, caracter\'{i}sticas propias de la Internet de las Cosas (IoT), sirven de velo para ocultar conductas maliciosas que afectan a estos dispositivos, sin que quede rastro de tales acciones. En este art\'{i}culo definimos el concepto de testigo digital: funcionalidad que permitir\'{a} a los dispositivos personales y otros objetos colaborar para implementar una cadena de custodia digital en la IoT. El fin perseguido es ofrecer soluciones que mitiguen los efectos de la ciberdelincuencia, ampar\'{a}ndose en la colaboraci\'{o}n de los dispositivos con arquitecturas de seguridad embebidas para alertar de conductas maliciosas, y dejar constancia de \'{e}stas.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Javier Lopez
Safeguarding Structural Controllability in Cyber-Physical Control Systems
In: The 21st European Symposium on Research in Computer Security (ESORICS 2016), pp. 471-489, Springer Springer, Crete, Greece, 2016, ISBN: 978-3-319-45741-3.
@inproceedings{1598,
title = {Safeguarding Structural Controllability in Cyber-Physical Control Systems},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1598.pdf},
isbn = {978-3-319-45741-3},
year = {2016},
date = {2016-01-01},
urldate = {2016-01-01},
booktitle = {The 21st European Symposium on Research in Computer Security (ESORICS 2016)},
volume = {9879},
pages = {471-489},
publisher = {Springer},
address = {Crete, Greece},
organization = {Springer},
abstract = {Automatic restoration of control wireless networks based on dynamic cyber-physical systems has become a hot topic in recent years, since most of their elements tend to have serious vulnerabilities that may be exploited by attackers. In fact, any exploitation may rapidly extend to the entire control network due to its problem of non-locality, where control properties of a system and its structural controllability can disintegrate over time. Unfortunately, automated self-healing processes may become costly procedures in which the reliability of the strategies and the time-critical of any recovery of the control can become key factors to re-establish the control properties in due time. This operational need is precisely the aim of this paper, in which four reachability-based recovery strategies from a thereotical point of view are proposed so as to find the best option/s in terms of optimization, robustness and complexity. To do this, new definitions related to structural controllability in relation to the type of distribution of the network and its control load capacity are given in this paper, resulting in an interesting practical study.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Ali El Kaafarani, David Nuñez, Siani Pearson
A Technique for Enhanced Provision of Appropriate Access to Evidence across Service Provision Chains
In: 10th International IFIP Summer School on Privacy and Identity Management, pp. 187-204, 2016, ISBN: 978-3-319-41762-2.
@inproceedings{agudo2016technique,
title = {A Technique for Enhanced Provision of Appropriate Access to Evidence across Service Provision Chains},
author = {Isaac Agudo and Ali El Kaafarani and David Nu\~{n}ez and Siani Pearson},
url = {/wp-content/papers/agudo2016technique.pdf},
doi = {10.1007/978-3-319-41763-9_13},
isbn = {978-3-319-41762-2},
year = {2016},
date = {2016-01-01},
urldate = {2016-01-01},
booktitle = {10th International IFIP Summer School on Privacy and Identity Management},
pages = {187-204},
abstract = {Transparency and verifiability are necessary aspects of accountability, but care needs to be taken that auditing is done in a privacy friendly way. There are situations where it would be useful for certain actors to be able to make restricted views within service provision chains on accountability evidence, including logs, available to other actors with specific governance roles. For example, a data subject or a Data Protection Authority (DPA) might want to authorize an accountability agent to act on their behalf, and be given access to certain logs in a way that does not compromise the privacy of other actors or the security of involved data processors. In this paper two cryptographic-based techniques that may address this issue are proposed and assessed.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Carlos Pares-Pulido, Isaac Agudo
LockPic: Privacy Preserving Photo Sharing in Social Networks
In: Joaquin Garcia-Alfaro, Guillermo Navarro-Arribas, Alessandro Aldini, Fabio Martinelli, Neeraj Suri (Ed.): Data Privacy Management, and Security Assurance, pp. 281–290, Springer International Publishing, Cham, 2016, ISBN: 978-3-319-29883-2.
@inproceedings{pulido15,
title = {LockPic: Privacy Preserving Photo Sharing in Social Networks},
author = {Carlos Pares-Pulido and Isaac Agudo},
editor = {Joaquin Garcia-Alfaro and Guillermo Navarro-Arribas and Alessandro Aldini and Fabio Martinelli and Neeraj Suri},
url = {/wp-content/papers/pulido15.pdf},
isbn = {978-3-319-29883-2},
year = {2016},
date = {2016-01-01},
urldate = {2016-01-01},
booktitle = {Data Privacy Management, and Security Assurance},
pages = {281\textendash290},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {There are many privacy concerns related to the use of social networks, in particular the posting of pictures and controlling who has access to them. In this paper we introduce a solution for the distribution of personal or sensitive pictures. Our aim is to provide a method for secure and privacy friendly picture sharing through social networks, that allows users to encrypt sensitive regions in pictures (particularly, faces) in a reversible, non-intrusive way, leaving the rest of the picture unaltered. This way, any image can be freely published and distributed on any social network, and viewed by as many users as the platform allows, while the protected parts are only accessible with the corresponding key. Once the key for a particular region has been acquired, the receiver of the picture can decrypt this region without downloading any additional information. The core of our proposal is a C library, which efficiently integrates an encryption/decryption algorithm with the encoding/decoding process. We have also released an Android application, LockPic, and a companion key server that showcase all the functionality mentioned in this work.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Javier Lopez, Kim-Kwang Raymond Choo
Dynamic Restoration in Interconnected RBAC-based Cyber-Physical Control Systems
In: Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (SECRYPT 2016), pp. 19-27, Lisboa, 2016, ISBN: 978-989-758-196-0.
@inproceedings{1585,
title = {Dynamic Restoration in Interconnected RBAC-based Cyber-Physical Control Systems},
author = {Cristina Alcaraz and Javier Lopez and Kim-Kwang Raymond Choo},
url = {/wp-content/papers/1585.pdf},
doi = {10.5220/0005942000190027},
isbn = {978-989-758-196-0},
year = {2016},
date = {2016-00-01},
urldate = {2016-00-01},
booktitle = {Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (SECRYPT 2016)},
pages = {19-27},
address = {Lisboa},
abstract = {Increasingly, automatic restoration is an indispensable security measure in control systems (e.g. those used in critical infrastructure sectors) due to the importance of ensuring the functionality of monitoring infrastructures. Modernizing the interconnection of control systems to provide interoperability between different networks, at a low cost, is also a critical requirement in control systems. However, automated recovery mechanisms are currently costly, and ensuring interoperability particularly at a low cost remains a topic of scientific challenge. This is the gap we seek to address in this paper. More specifically, we propose a restoration model for interconnected contexts, taking into account the theory of supernode and structural controllability, as well as the recommendations given by the IEC-62351-8 standard (which are mainly based on the implementation of a role-based access control system).},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Estefania Etcheves Miciolino, Stephen Wolthusen
Multi-Round Attacks on Structural Controllability Properties for Non-Complete Random Graphs
In: The 16th Information Security Conference (ISC), pp. 140–151, Springer Springer, Springer International Publishing Switzerland, 2015.
@inproceedings{alcaraz2013controla,
title = {Multi-Round Attacks on Structural Controllability Properties for Non-Complete Random Graphs},
author = {Cristina Alcaraz and Estefania Etcheves Miciolino and Stephen Wolthusen},
url = {/wp-content/papers/alcaraz2013controla.pdf},
doi = {10.1007/978-3-319-27659-5 10},
year = {2015},
date = {2015-09-01},
urldate = {2015-09-01},
booktitle = {The 16th Information Security Conference (ISC)},
volume = {7807},
pages = {140\textendash151},
publisher = {Springer},
address = {Springer International Publishing Switzerland},
organization = {Springer},
abstract = {The notion of controllability, informally the ability to force a system into a desired state in a finite time or number of steps, is most closely associated with control systems such as those used to maintain power networks and other critical infrastructures, but has wider relevance in distributed systems. It is clearly highly desirable to understand under which conditions attackers may be able to disrupt legitimate control, or to force overriding controllability themselves. Following recent results by Liu et al., there has been considerable interest also in graph-theoretical interpretation of Kalman controllability originally introduced by Lin, structural controllability. This permits the identification of sets of driver nodes with the desired state-forcing property, but determining such nodes is aW[2]-hard problem. To extract these nodes and represent the control relation, here we apply the POWER DOMINATING SET problem and investigate the effects of targeted iterative multiple-vertex removal. We report the impact that different attack strategies with multiple edge and vertex removal will have, based on underlying non-complete graphs, with an emphasis on power-law random graphs with different degree sequences.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Kristian Beckers, Maritta Heisel
Engineering Trust- and Reputation-based Security Controls for Future Internet Systems
In: The 30th ACM/SIGAPP Symposium On Applied Computing (SAC 2015), pp. 1344-1349, Salamanca, Spain, 2015, ISBN: 978-1-4503-3196-8.
BibTeX | Links:
@inproceedings{moyano15SAC,
title = {Engineering Trust- and Reputation-based Security Controls for Future Internet Systems},
author = {Francisco Moyano and Carmen Fernandez-Gago and Kristian Beckers and Maritta Heisel},
url = {/wp-content/papers/moyano15SAC.pdf},
doi = {10.1145/2695664.2695713},
isbn = {978-1-4503-3196-8},
year = {2015},
date = {2015-08-01},
urldate = {2015-08-01},
booktitle = {The 30th ACM/SIGAPP Symposium On Applied Computing (SAC 2015)},
pages = {1344-1349},
address = {Salamanca, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Nuñez, Isaac Agudo, Javier Lopez
A Parametric Family of Attack Models for Proxy Re-Encryption
In: 28th IEEE Computer Security Foundations Symposium, pp. 290-301, IEEE Computer Society IEEE Computer Society, Verona, Italy, 2015, ISSN: 1063-6900.
@inproceedings{nunez2015parametric,
title = {A Parametric Family of Attack Models for Proxy Re-Encryption},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2015parametric.pdf},
doi = {10.1109/CSF.2015.27},
issn = {1063-6900},
year = {2015},
date = {2015-07-01},
urldate = {2015-07-01},
booktitle = {28th IEEE Computer Security Foundations Symposium},
pages = {290-301},
publisher = {IEEE Computer Society},
address = {Verona, Italy},
organization = {IEEE Computer Society},
series = {CSF’15},
abstract = {Proxy Re-Encryption (PRE) is a type of Public-Key Encryption (PKE) which provides an additional re-encryption functionality. Although PRE is inherently more complex than PKE, attack models for PRE have not been developed further than those inherited from PKE. In this paper we address this gap and define a parametric family of attack models for PRE, based on the availability of both the decryption and re-encryption oracles during the security game. This family enables the definition of a set of intermediate security notions for PRE that ranges from ‘‘plain’’ IND-CPA to ‘‘full’’ IND-CCA. We analyze some relations among these notions of security, and in particular, the separations that arise when the re-encryption oracle leaks re-encryption keys. In addition, we discuss which of these security notions represent meaningful adversarial models for PRE. Finally, we provide an example of a recent ‘‘CCA1- secure’’ scheme from PKC 2014 whose security model does not capture chosen-ciphertext attacks through re-encryption and for which we describe an attack under a more realistic security notion. This attack emphasizes the fact that PRE schemes that leak re-encryption keys cannot achieve strong security notions.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Lorena Cazorla, Gerardo Fernandez
Context-Awareness using Anomaly-based Detectors for Smart Grid Domains
In: 9th International Conference on Risks and Security of Internet and Systems, pp. 17-34, Springer International Publishing Springer International Publishing, Trento, 2015, ISBN: 978-3-319-17126-5.
@inproceedings{931,
title = {Context-Awareness using Anomaly-based Detectors for Smart Grid Domains},
author = {Cristina Alcaraz and Lorena Cazorla and Gerardo Fernandez},
url = {/wp-content/papers/931.pdf
http://link.springer.com/chapter/10.1007%2F978-3-319-17127-2_2$#$},
doi = {10.1007/978-3-319-17127-2_2},
isbn = {978-3-319-17126-5},
year = {2015},
date = {2015-04-01},
urldate = {2015-04-01},
booktitle = {9th International Conference on Risks and Security of Internet and Systems},
volume = {8924},
pages = {17-34},
publisher = {Springer International Publishing},
address = {Trento},
organization = {Springer International Publishing},
abstract = {Anomaly-based detection applied in strongly interdependent systems, like Smart Grids, has become one of the most challenging research areas in recent years. Early detection of anomalies so as to detect and prevent unexpected faults or stealthy threats is attracting a great deal of attention from the scientific community because it offers potential solutions for context-awareness. These solutions can also help explain the conditions leading up to a given situation and help determine the degree of its severity. However, not all the existing approaches within the literature are equally effective in covering the needs of a particular scenario. It is necessary to explore the control requirements of the domains that comprise a Smart Grid, identify, and even select, those approaches according to these requirements and the intrinsic conditions related to the application context, such as technological heterogeneity and complexity. Therefore, this paper analyses the functional features of existing anomaly-based approaches so as to adapt them, according to the aforementioned conditions. The result of this investigation is a guideline for the construction of preventive solutions that will help improve the context-awareness in the control of Smart Grid domains in the near future.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David Nuñez, Isaac Agudo, Javier Lopez
NTRUReEncrypt: An Efficient Proxy Re-Encryption Scheme Based on NTRU
In: 10th ACM Symposium on Information, Computer and Communications Security (AsiaCCS), pp. 179-189, 2015, ISBN: 978-1-4503-3245-3.
@inproceedings{nunez2015ntrureencrypt,
title = {NTRUReEncrypt: An Efficient Proxy Re-Encryption Scheme Based on NTRU},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2015ntrureencrypt.pdf},
doi = {10.1145/2714576.2714585},
isbn = {978-1-4503-3245-3},
year = {2015},
date = {2015-04-01},
urldate = {2015-04-01},
booktitle = {10th ACM Symposium on Information, Computer and Communications Security (AsiaCCS)},
pages = {179-189},
abstract = {The use of alternative foundations for constructing more secure and efficient cryptographic schemes is a topic worth exploring. In the case of proxy re-encryption, the vast majority of schemes are based on number theoretic problems such as the discrete logarithm. In this paper we present NTRUReEncrypt, a new bidirectional and multihop proxy re-encryption scheme based on NTRU, a widely known lattice-based cryptosystem. We provide two versions of our scheme: the first one is based on the conventional NTRU encryption scheme and, although it lacks a security proof, remains as efficient as its predecessor; the second one is based on a variant of NTRU proposed by Stehl\'{e} and Steinfeld, which is proven CPA-secure under the hardness of the Ring-LWE problem. To the best of our knowledge, our proposals are the first proxy re-encryption schemes to be based on the NTRU primitive. In addition, we provide experimental results to show the efficiency of our proposal, as well as a comparison with previous proxy re-encryption schemes, which confirms that our first scheme outperforms the rest by an order of magnitude.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Carmen Fernandez-Gago, Vasilis Tountopoulos, Simone Fischer-Hübner, Rehab Alnemr, David Nuñez, Julio Angulo, Tobias Pulls, Theo Koulouris
Tools for Cloud Accountability: A4Cloud Tutorial
In: 9th IFIP Summer School on Privacy and Identity Management for the Future Internet in the Age of Globalisation, pp. 219-236, Springer IFIP AICT Springer IFIP AICT, Patras (Greece), 2015, ISSN: 978-3-319-18621-4.
@inproceedings{1516,
title = {Tools for Cloud Accountability: A4Cloud Tutorial},
author = {Carmen Fernandez-Gago and Vasilis Tountopoulos and Simone Fischer-H\"{u}bner and Rehab Alnemr and David Nu\~{n}ez and Julio Angulo and Tobias Pulls and Theo Koulouris},
url = {/wp-content/papers/1516.pdf},
doi = {10.1007/978-3-319-18621-4_15},
issn = {978-3-319-18621-4},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
booktitle = {9th IFIP Summer School on Privacy and Identity Management for the Future Internet in the Age of Globalisation},
volume = {457},
pages = {219-236},
publisher = {Springer IFIP AICT},
address = {Patras (Greece)},
organization = {Springer IFIP AICT},
abstract = {Cloud computing is becoming a key IT infrastructure technology being adopted progressively by companies and users. Still, there are issues and uncertainties surrounding its adoption, such as security and how users data is dealt with that require attention from developers, researchers, providers and users. The A4Cloud project tries to help solving the problem of accountability in the cloud by providing tools that support the process of achieving accountability. This paper presents the contents of the first A4Cloud tutorial. These contents include basic concepts and tools developed within the project. In particular, we will review how metrics can aid the accountability process and some of the tools that the A4Cloud project will produce such as the Data Track Tool (DTT) and the Cloud Offering Advisory Tool (COAT).},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Nuñez, Isaac Agudo, Javier Lopez
Delegated Access for Hadoop Clusters in the Cloud
In: IEEE International Conference on Cloud Computing Technology and Science (CloudCom 2014), pp. 374-379, IEEE IEEE, Singapore, 2014, ISBN: 978-1-4799-4093-6.
@inproceedings{nunez2014delegated,
title = {Delegated Access for Hadoop Clusters in the Cloud},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2014delegated.pdf
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7037691},
doi = {10.1109/CloudCom.2014.50},
isbn = {978-1-4799-4093-6},
year = {2014},
date = {2014-12-01},
urldate = {2014-12-01},
booktitle = {IEEE International Conference on Cloud Computing Technology and Science (CloudCom 2014)},
pages = {374-379},
publisher = {IEEE},
address = {Singapore},
organization = {IEEE},
abstract = {Among Big Data technologies, Hadoop stands out for its capacity to store and process large-scale datasets. However, although Hadoop was not designed with security in mind, it is widely used by plenty of organizations, some of which have strong data protection requirements. Traditional access control solutions are not enough, and cryptographic solutions must be put in place to protect sensitive information. In this paper, we describe a cryptographically-enforced access control system for Hadoop, based on proxy re-encryption. Our proposed solution fits in well with the outsourcing of Big Data processing to the cloud, since information can be stored in encrypted form in external servers in the cloud and processed only if access has been delegated. Experimental results show that the overhead produced by our solution is manageable, which makes it suitable for some applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Ruben Rios, Bernardo Palenciano
Análisis y Desarrollo de un Canal Encubierto en una Red de Sensores
In: XIII Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2014), pp. 333-338, Universidad de Alicante Universidad de Alicante, Alicante, Spain, 2014, ISBN: 978-84-9717-323-0.
@inproceedings{onieva2014,
title = {An\'{a}lisis y Desarrollo de un Canal Encubierto en una Red de Sensores},
author = {Jose A. Onieva and Ruben Rios and Bernardo Palenciano},
url = {/wp-content/papers/onieva2014.pdf},
isbn = {978-84-9717-323-0},
year = {2014},
date = {2014-09-01},
urldate = {2014-09-01},
booktitle = {XIII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2014)},
pages = {333-338},
publisher = {Universidad de Alicante},
address = {Alicante, Spain},
organization = {Universidad de Alicante},
abstract = {Continuamente aparecen nuevos estudios as\'{i} como nuevos desarrollos de canales encubiertos. Como veremos, existen m\'{a}s de cien dise\~{n}os distintos para redes de ordenadores, pero no hemos encontrado en la literatura ning\'{u}n an\'{a}lisis, dise\~{n}o e implementaci\'{o}n de canales encubiertos sobre redes de sensores. En este art\'{i}culo presentamos los resultados del dise\~{n}o e implementaci\'{o}n de un canal multitasa basado en los tiempos de monitorizaci\'{o}n sobre una red de sensores. En este proceso se han establecido las principales propiedades necesarias y, en base a ellas, se desarrolla e implementa el canal encubierto. Se describe el proceso de desarrollo y se analiza su detectabilidad.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ana Nieto, Javier Lopez
Herramienta para la Compensación de Parámetros de QoS y Seguridad
In: XIII Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2014), pp. 303-308, Alicante (España)., 2014, ISBN: 978-84-9717-323-0.
@inproceedings{909,
title = {Herramienta para la Compensaci\'{o}n de Par\'{a}metros de QoS y Seguridad},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/909.pdf},
isbn = {978-84-9717-323-0},
year = {2014},
date = {2014-09-01},
urldate = {2014-09-01},
booktitle = {XIII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2014)},
pages = {303-308},
address = {Alicante (Espa\~{n}a).},
abstract = {El an\'{a}lisis conjunto de mecanismos de seguridad y QoS es esencial para las redes heterog\'{e}neas donde diversos dispositivos pueden coexistir en entornos din\'{a}micos. En concreto, los dispositivos no siempre pueden ser conocidos, por lo que diferentes requisitos y mecanismos pueden surgir para el an\'{a}lisis. En este art\'{i}culo, proponemos una herramienta para facilitar la configuraci\'{o}n de entornos basada en el an\'{a}lisis param\'{e}trico de dependencias, tomando como base de conocimiento un conjunto de par\'{a}metros de seguridad y QoS. Esta forma de an\'{a}lisis de par\'{a}metros a alto nivel permite considerar las dependencias y la compensaci\'{o}n entre mecanismos con independencia del sistema de informaci\'{o}n subyacente. Posibilita por tanto evaluar el impacto que tales mecanismos, y otros definidos acorde al modelo, tienen sobre un sistema previo a su despliegue.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Javier Lopez
Security and QoS Tradeoff Recommendation System (SQT-RS) for Dynamic Assessing CPRM-based Systems
In: 10th ACM International Symposium on QoS and Security for Wireless and Mobile Networks (Q2SWinet’14), pp. 25-32, ACM ACM, Montréal (Canada), 2014, ISBN: 978-1-4503-3027-5.
@inproceedings{932,
title = {Security and QoS Tradeoff Recommendation System (SQT-RS) for Dynamic Assessing CPRM-based Systems},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/932.pdf},
doi = {10.1145/2642687.2642689},
isbn = {978-1-4503-3027-5},
year = {2014},
date = {2014-09-01},
urldate = {2014-09-01},
booktitle = {10th ACM International Symposium on QoS and Security for Wireless and Mobile Networks (Q2SWinet’14)},
pages = {25-32},
publisher = {ACM},
address = {Montr\'{e}al (Canada)},
organization = {ACM},
abstract = {Context-based Parametric Relationship Models (CPRM) define complex dependencies between different types of parameters. In particular, Security and QoS relationships, that may occur at different levels of abstraction, are easily identified using CPRM. However, the growing number of parameters and relationships, typically due to the heterogeneous scenarios of future networks, increase the complexity of the final diagrams used in the analysis, and makes the current solution for assessing Security and QoS tradeoff (SQT) impractical for untrained users. In this paper, we define a recommendation system based on contextual parametric relationships in accordance with the definition of CPRM. The inputs for the system are generated dynamically based on the context provided by CPRM-based systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Kristian Beckers, Maritta Heisel
Enhancing Problem Frames with Trust and Reputation for Analyzing Smart Grid Security Requirements
In: Jorge Cuellar (Ed.): Smart Grid Security – Second International Workshop, pp. 166-180, Springer Springer, Munich, 2014, ISSN: 0302-9743.
BibTeX | Links:
@inproceedings{moyano14smartgridsec,
title = {Enhancing Problem Frames with Trust and Reputation for Analyzing Smart Grid Security Requirements},
author = {Francisco Moyano and Carmen Fernandez-Gago and Kristian Beckers and Maritta Heisel},
editor = {Jorge Cuellar},
url = {/wp-content/papers/moyano14smartgridsec.pdf},
doi = {10.1007/978-3-319-10329-7_11},
issn = {0302-9743},
year = {2014},
date = {2014-08-01},
urldate = {2014-08-01},
booktitle = {Smart Grid Security - Second International Workshop},
volume = {8448},
pages = {166-180},
publisher = {Springer},
address = {Munich},
organization = {Springer},
series = {LNCS},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ana Nieto, Javier Lopez
A Context-based Parametric Relationship Model (CPRM) to Measure the Security and QoS tradeoff in Configurable Environments
In: IEEE International Conference on Communications (ICC’14), pp. 755-760, IEEE Communications Society IEEE Communications Society, Sydney (Australia), 2014, ISBN: 978-1-4799-2003-7.
@inproceedings{431,
title = {A Context-based Parametric Relationship Model (CPRM) to Measure the Security and QoS tradeoff in Configurable Environments},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/431.pdf},
doi = {10.1109/ICC.2014.6883410},
isbn = {978-1-4799-2003-7},
year = {2014},
date = {2014-06-01},
urldate = {2014-06-01},
booktitle = {IEEE International Conference on Communications (ICC’14)},
pages = {755-760},
publisher = {IEEE Communications Society},
address = {Sydney (Australia)},
organization = {IEEE Communications Society},
abstract = {Heterogeneity of future networks requires the use of extensible models to understand the Security and QoS tradeoff. We believe that a good starting point is to analyze the Security and QoS tradeoff from a parametric point of view and, for this reason, in a previous paper, we defined the Parametric Rela- tionship Model (PRM) to define relationships between Security and QoS parameters. In this paper, we extend that approach in order to change the behaviour of the model so that different contexts in the same system are considered; that is, to provide a Context-based Parametric Relationship Model (CPRM). The final aim is to provide useful tools for system administrators in order to help them deal with Security and QoS tradeoff issues in the configuration of the environment.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Kristian Beckers, Carmen Fernandez-Gago
Trust-Aware Decision-Making Methodology for Cloud Sourcing
In: Matthias Jarke, John Mylopoulos, Christoph Quix, Colette Rolland, Yannis Manolopoulos, Haralambos Mouratidis, Jennifer Horkoff (Ed.): 26th International Conference on Advanced Information Systems Engineering (CAiSE 2014), pp. 136-149, Springer Springer, Thessaloniki, 2014, ISSN: 0302-9743.
@inproceedings{moyano14caise,
title = {Trust-Aware Decision-Making Methodology for Cloud Sourcing},
author = {Francisco Moyano and Kristian Beckers and Carmen Fernandez-Gago},
editor = {Matthias Jarke and John Mylopoulos and Christoph Quix and Colette Rolland and Yannis Manolopoulos and Haralambos Mouratidis and Jennifer Horkoff},
url = {/wp-content/papers/moyano14caise.pdf},
doi = {10.1007/978-3-319-07881-6},
issn = {0302-9743},
year = {2014},
date = {2014-06-01},
urldate = {2014-06-01},
booktitle = {26th International Conference on Advanced Information Systems Engineering (CAiSE 2014)},
volume = {8484},
pages = {136-149},
publisher = {Springer},
address = {Thessaloniki},
organization = {Springer},
series = {LCNS},
abstract = {Cloud sourcing consists of outsourcing data, services and infrastructure to cloud providers. Even when this outsourcing model brings advantages to cloud customers, new threats also arise as sensitive data and critical IT services are beyond customers’ control. When an organization considers moving to the cloud, IT decision makers must select a cloud provider and must decide which parts of the organization will be outsourced and to which extent. This paper proposes a methodology that allows decision makers to evaluate their trust in cloud providers. The methodology provides a systematic way to elicit knowledge about cloud providers, quantify their trust factors and aggregate them into trust values that can assist the decision-making process. The trust model that we propose is based on trust intervals, which allow capturing uncertainty during the evaluation, and we define an operator for aggregating these trust intervals. The methodology is applied to an eHealth scenario.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Ruben Rios, Jorge Cuellar
Preserving Receiver-Location Privacy in Wireless Sensor Networks
In: Information Security Practice and Experience (ISPEC 2014), pp. 15-27, Springer Springer, Fuzhou, China, 2014, ISSN: 0302-9743.
@inproceedings{Lopez2014prl,
title = {Preserving Receiver-Location Privacy in Wireless Sensor Networks},
author = {Javier Lopez and Ruben Rios and Jorge Cuellar},
url = {/wp-content/papers/Lopez2014prl.pdf
http://link.springer.com/chapter/10.1007/978-3-319-06320-1_3$#$, },
doi = {10.1007/978-3-319-06320-1_3},
issn = {0302-9743},
year = {2014},
date = {2014-05-01},
urldate = {2014-05-01},
booktitle = {Information Security Practice and Experience (ISPEC 2014)},
volume = {8434},
pages = {15-27},
publisher = {Springer},
address = {Fuzhou, China},
organization = {Springer},
abstract = {Wireless sensor networks (WSNs) are exposed to many different types of attacks. Among these, the most devastating attack is to compromise or destroy the base station since all communications are addressed exclusively to it. Moreover, this feature can be exploited by a passive adversary to determine the location of this critical device. This receiver-location privacy problem can be reduced by hindering traffic analysis but the adversary may still obtain location information by capturing a subset of sensor nodes in the field. This paper addresses, for the first time, these two problems together in a single solution},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto
Evaluation of Dynamic Instantiation in CPRM-based Systems
In: 9th International Conference on Risk and Security of Internet and Systems (CRiSIS’14), pp. 52-66, Springer Springer, Trento (Italy), 2014, ISBN: 978-3-319-17127-2.
@inproceedings{933,
title = {Evaluation of Dynamic Instantiation in CPRM-based Systems},
author = {Ana Nieto},
url = {/wp-content/papers/933.pdf},
doi = {10.1007/978-3-319-17127-2_4},
isbn = {978-3-319-17127-2},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
booktitle = {9th International Conference on Risk and Security of Internet and Systems (CRiSIS’14)},
volume = {8924},
pages = {52-66},
publisher = {Springer},
address = {Trento (Italy)},
organization = {Springer},
abstract = {Context-based Parametric Relationship Models (CPRMs) reduce the complexity of working with various numbers of parameters and dependencies, by adding particular contexts to the final scheme when it is required, dynamically. In this paper the cost of including new information in CPRM is properly analysed, considering the information in the parametric trees defined for the parameters in the CPRM-based system. Some strategies for mitigating the cost of the instantiation process are proposed.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jorge L. Hernández-Ardieta, David Santos, Pascual Parra, Juan E. Tapiador, Pedro Peris-López, Javier Lopez, Gerardo Fernandez
An Intelligent and Adaptive Live Simulator: A new Concept for Cybersecurity Training
In: 9th Future Security Conference, Berlin, 2014.
@inproceedings{1637,
title = {An Intelligent and Adaptive Live Simulator: A new Concept for Cybersecurity Training},
author = {Jorge L. Hern\'{a}ndez-Ardieta and David Santos and Pascual Parra and Juan E. Tapiador and Pedro Peris-L\'{o}pez and Javier Lopez and Gerardo Fernandez},
url = {/wp-content/papers/1637.pdf},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
booktitle = {9th Future Security Conference},
address = {Berlin},
abstract = {The rapid rate of change in technology and the increasing sophistication of cyber attacks require any organization to have a continuous preparation. However, the resource and time intensive nature of cybersecurity education and training renders traditional approaches highly inefficient. Simulators have attracted the attention in the last years as a potential solution for cybersecurity training. However, in spite of the advances achieved, there is still an urgent need to address some open challenges. In this paper we present a novel simulator that solves some these challenges. First, we analyse the main properties that any cybersecurity training solution should comprise, and evaluate to what extent training simulators can meet them. Next, we introduce the functional architecture and innovative features of the simulator, of which a functional prototype has already been released. Finally, we demonstrate how these capabilities are put into practice in training courses already available in the simulator.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Stephen Wolthusen
Recovery of Structural Controllability for Control Systems
In: Eighth IFIP WG 11.10 International Conference on Critical Infrastructure Protection, SRI International, Arlington, Virginia, USA, pp. 47-63, Springer Springer, Arlington, Virginia, USA, 2014, ISSN: 1868-4238.
@inproceedings{430,
title = {Recovery of Structural Controllability for Control Systems},
author = {Cristina Alcaraz and Stephen Wolthusen},
url = {/wp-content/papers/430.pdf},
doi = {10.1007/978-3-662-45355-1_4},
issn = {1868-4238},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
booktitle = {Eighth IFIP WG 11.10 International Conference on Critical Infrastructure Protection, SRI International, Arlington, Virginia, USA},
volume = {441},
pages = {47-63},
publisher = {Springer},
address = {Arlington, Virginia, USA},
organization = {Springer},
abstract = {Fundamental problems in control systems theory are controllability and observability, and designing control systems so that these properties are satisfied or approximated sufficiently. However, it is prudent to as- sume that an attacker will not only be able to subvert measurements but also control the system. Moreover, an advanced adversary with an understanding of the control system may seek to take over control of the entire system or parts thereof, or deny the legitimate operator this capability. The effectiveness of such attacks has been demonstrated in previous work. Indeed, these attacks cannot be ruled out given the likely existence of unknown vulnerabilities, increasing connectivity of nominally air-gapped systems and supply chain issues. The ability to rapidly recover control after an attack has been initiated and to detect an adversary’s presence is, therefore, critical. This paper focuses on the problem of structural controllability, which has recently attracted substantial attention through the equivalent problem of the power dom- inating set introduced in the context of electrical power network control. However, these problems are known to be NP-hard with poor approx- imability. Given their relevance to many networks, especially power networks, this paper studies strategies for the efficient restoration of controllability following attacks and attacker-defender interactions in power-law networks.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David Nuñez, Carmen Fernandez-Gago, Siani Pearson, Massimo Felici
A Metamodel for Measuring Accountability Attributes in the Cloud
In: 2013 IEEE International Conference on Cloud Computing Technology and Science (CloudCom 2013), pp. 355-362, IEEE IEEE, Bristol, UK, 2013, ISBN: 978-0-7685-5095-4.
@inproceedings{nunez2013metamodel,
title = {A Metamodel for Measuring Accountability Attributes in the Cloud},
author = {David Nu\~{n}ez and Carmen Fernandez-Gago and Siani Pearson and Massimo Felici},
url = {/wp-content/papers/nunez2013metamodel.pdf},
doi = {10.1109/CloudCom.2013.53},
isbn = {978-0-7685-5095-4},
year = {2013},
date = {2013-12-01},
urldate = {2013-12-01},
booktitle = {2013 IEEE International Conference on Cloud Computing Technology and Science (CloudCom 2013)},
pages = {355-362},
publisher = {IEEE},
address = {Bristol, UK},
organization = {IEEE},
abstract = {Cloud governance, and in particular data governance in the cloud, relies on different technical and organizational practices and procedures, such as policy enforcement, risk management, incident management and remediation. The concept of accountability encompasses such practices, and is essential for enhancing security and trustworthiness in the cloud. Besides this, proper measurement of cloud services, both at a technical and governance level, is a distinctive aspect of the cloud computing model. Hence, a natural problem that arises is how to measure the impact on accountability of the procedures held in practice by organizations that participate in the cloud ecosystem. In this paper, we describe a metamodel for addressing the problem of measuring accountability properties for cloud computing, as discussed and defined by the Cloud Accountability Project (A4Cloud). The goal of this metamodel is to act as a language for describing: (i) accountability properties in terms of actions between entities, and (ii) metrics for measuring the fulfillment of such properties. It also allows the recursive decomposition of properties and metrics, from a high-level and abstract world to a tangible and measurable one. Finally, we illustrate our proposal of the metamodel by modelling the transparency property, and define some metrics for it.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Federica Paci, Carmen Fernandez-Gago, Francisco Moyano
Detecting Insider Threats: a Trust-Aware Framework
In: 8th International Conference on Availability, Reliability and Security, pp. 121-130, IEEE IEEE, Regensburg, Germany, 2013, ISBN: 978-0-7695-5008-4.
@inproceedings{moyano2013ares,
title = {Detecting Insider Threats: a Trust-Aware Framework},
author = {Federica Paci and Carmen Fernandez-Gago and Francisco Moyano},
url = {/wp-content/papers/moyano2013ares.pdf},
doi = {10.1109/ARES.2013.22},
isbn = {978-0-7695-5008-4},
year = {2013},
date = {2013-11-01},
urldate = {2013-11-01},
booktitle = {8th International Conference on Availability, Reliability and Security},
pages = {121-130},
publisher = {IEEE},
address = {Regensburg, Germany},
organization = {IEEE},
abstract = {The number of insider threats hitting organizations and big enterprises is rapidly growing. Insider threats occur when trusted employees misuse their permissions on organizational assets. Since insider threats know the organization and its processes, very often they end up undetected. Therefore, there is a pressing need for organizations to adopt preventive mechanisms to defend against insider threats. In this paper, we propose a framework for insiders identification during the early requirement analysis of organizational settings and of its IT systems. The framework supports security engineers in the detection of insider threats and in the prioritization of them based on the risk they represent to the organization. To enable the automatic detection of insider threats, we extend the SI* requirement modeling language with an asset model and a trust model. The asset model allows associating security properties and sensitivity levels to assets. The trust model allows specifying the trust level that a user places in another user with respect to a given permission on an asset. The insider threats identification leverages the trust levels associated with the permissions assigned to users, as well as the sensitivity of the assets to which access is granted. We illustrate the approach based on a patient monitoring scenario.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Jorge Cuellar, Javier Lopez
Ocultación de la estación base en redes inalámbricas de sensores
In: Jesús E. Díaz Verdejo, Jorge Navarro Ortiz, Juan J. Ramos Muñoz (Ed.): XI Jornadas de Ingeniería Telemática (JITEL 2013), pp. 481-486, Asociación de Telemática Asociación de Telemática, Granada, 2013, ISBN: 978-84-616-5597-7.
@inproceedings{rios2013b,
title = {Ocultaci\'{o}n de la estaci\'{o}n base en redes inal\'{a}mbricas de sensores},
author = {Ruben Rios and Jorge Cuellar and Javier Lopez},
editor = {Jes\'{u}s E. D\'{i}az Verdejo and Jorge Navarro Ortiz and Juan J. Ramos Mu\~{n}oz},
url = {/wp-content/papers/rios2013b.pdf},
isbn = {978-84-616-5597-7},
year = {2013},
date = {2013-10-01},
urldate = {2013-10-01},
booktitle = {XI Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL 2013)},
pages = {481-486},
publisher = {Asociaci\'{o}n de Telem\'{a}tica},
address = {Granada},
organization = {Asociaci\'{o}n de Telem\'{a}tica},
abstract = {La estaci\'{o}n base es el elemento m\'{a}s importante en un red de sensores y, por tanto, es necesario evitar que un atacante pueda hacerse con el control de este valioso dispositivo. Para ello, el atacante puede valerse tanto de t\'{e}cnicas de an\'{a}lisis de tr\'{a}fico como de la captura de nodos. En este trabajo presentamos un esquema que consta de dos fases, la primera est\'{a} dedicada a homogeneizar los patrones de tr\'{a}fico y la segunda encargada de perturbar las tablas de rutas de los nodos. Ambas fases permiten mantener a la estaci\'{o}n base fuera del alcance del atacante con un coste computacional insignificante y un consumo energ\'{e}tico moderado. La validez de nuestro esquema ha sido validada anal\'{i}ticamente y a trav\'{e}s de numerosas simulaciones.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David Nuñez, Isaac Agudo, Javier Lopez
Leveraging Privacy in Identity Management as a Service through Proxy Re-Encryption
In: Ph.D Symposium of the European Conference on Service-Oriented and Cloud Computing (ESOCC) 2013, Málaga, Spain, 2013.
@inproceedings{nunez2013leveraging,
title = {Leveraging Privacy in Identity Management as a Service through Proxy Re-Encryption},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2013leveraging.pdf},
year = {2013},
date = {2013-09-01},
urldate = {2013-09-01},
booktitle = {Ph.D Symposium of the European Conference on Service-Oriented and Cloud Computing (ESOCC) 2013},
address = {M\'{a}laga, Spain},
abstract = {The advent of cloud computing has provided the opportunity to externalize the identity management processes, shaping what has been called Identity Management as a Service (IDaaS). However, as in the case of other cloud-based services, IDaaS brings with it great concerns regarding security and privacy, such as the loss of control over the outsourced data. As part of this PhD thesis, we analyze these concerns and propose BlindIdM, a model for privacy-preserving IDaaS with a focus on data privacy protection through the use of proxy re-encryption.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
Towards Engineering Trust-aware Future Internet Systems
In: Xavier Franch, Pnina Soffer (Ed.): 3rd International Workshop on Information Systems Security Engineering (WISSE 2013), pp. 490-501, Springer-Verlag Springer-Verlag, Valencia, 2013, ISSN: 1865-1348.
@inproceedings{moyano13wisse,
title = {Towards Engineering Trust-aware Future Internet Systems},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
editor = {Xavier Franch and Pnina Soffer},
url = {/wp-content/papers/moyano13wisse.pdf
http://link.springer.com/book/10.1007/978-3-642-38490-5/page/3},
doi = {10.1007/978-3-642-38490-5},
issn = {1865-1348},
year = {2013},
date = {2013-06-01},
urldate = {2013-06-01},
booktitle = {3rd International Workshop on Information Systems Security Engineering (WISSE 2013)},
volume = {148},
pages = {490-501},
publisher = {Springer-Verlag},
address = {Valencia},
organization = {Springer-Verlag},
series = {LNBIP},
abstract = {Security must be a primary concern when engineering Future Internet (FI) systems and applications. In order to achieve secure solutions, we need to capture security requirements early in the Software Development Life Cycle (SDLC). Whereas the security community has traditionally focused on providing tools and mechanisms to capture and express hard security requirements (e.g. confidentiality), little attention has been paid to other important requirements such as trust and reputation. We argue that these soft security requirements can leverage security in open, distributed, heterogeneous systems and applications and that they must be included in an early phase as part of the development process. In this paper we propose a UML extension for specifying trust and reputation requirements, and we apply it to an eHealth case study.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Benoit Baudry, Javier Lopez
Towards Trust-Aware and Self-Adaptive Systems
In: Carmen Fernandez-Gago, Isaac Agudo, Fabio Martinelli, Siani Pearson (Ed.): 7th IFIP WG 11.11 International Conference on Trust Management (IFIPTM 2013), pp. 255-262, Springer Springer, Malaga, 2013, ISSN: 1868-4238.
@inproceedings{moyano2013ifiptm,
title = {Towards Trust-Aware and Self-Adaptive Systems},
author = {Francisco Moyano and Benoit Baudry and Javier Lopez},
editor = {Carmen Fernandez-Gago and Isaac Agudo and Fabio Martinelli and Siani Pearson},
url = {/wp-content/papers/moyano2013ifiptm.pdf},
doi = {10.1007/978-3-642-38323-6},
issn = {1868-4238},
year = {2013},
date = {2013-06-01},
urldate = {2013-06-01},
booktitle = {7th IFIP WG 11.11 International Conference on Trust Management (IFIPTM 2013)},
volume = {401},
pages = {255-262},
publisher = {Springer},
address = {Malaga},
organization = {Springer},
series = {AICT},
abstract = {The Future Internet (FI) comprises scenarios where many heterogeneous and dynamic entities must interact to provide services (e.g., sensors, mobile devices and information systems in smart city scenarios). The dynamic conditions under which FI applications must execute call for self-adaptive software to cope with unforeseeable changes in the application environment. Software engineering currently provides frameworks to develop reasoning engines that automatically take reconfiguration decisions and that support the runtime adaptation of distributed, heterogeneous applications. However, these frameworks have very limited support to address security concerns of these application, hindering their usage for FI scenarios. We address this challenge by enhancing self-adaptive systems with the concepts of trust and reputation. Trust will improve decision-making processes under risk and uncertainty, in turn improving security of self-adaptive FI applications. This paper presents an approach that includes a trust and reputation framework into a platform for adaptive, distributed component-based systems, thus providing software components with new abilities to include trust in their reasoning process.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
Building Trust and Reputation In: A Development Framework for Trust Models Implementation
In: Audung Jøsang, Pierangela Samarati, Marinella Petrocchi (Ed.): 8th International Workshop on Security and Trust Management (STM 2012), pp. 113-128, Springer Springer, Pisa, 2013, ISSN: 0302-9743.
@inproceedings{moyano2012stm,
title = {Building Trust and Reputation In: A Development Framework for Trust Models Implementation},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
editor = {Audung J\osang and Pierangela Samarati and Marinella Petrocchi},
url = {/wp-content/papers/moyano2012stm.pdf},
doi = {10.1007/978-3-642-38004-4},
issn = {0302-9743},
year = {2013},
date = {2013-01-01},
urldate = {2013-01-01},
booktitle = {8th International Workshop on Security and Trust Management (STM 2012)},
volume = {7783},
pages = {113-128},
publisher = {Springer},
address = {Pisa},
organization = {Springer},
series = {LNCS},
abstract = {During the last years, many trust and reputation models have been proposed, each one targeting different contexts and purposes, and with their own particularities. While most contributions focus on defining ever-increasing complex models, little attention has been paid to the process of building these models inside applications during their implementation. The result is that models have traditionally considered as ad-hoc and after-the-fact solutions that do not always fit with the design of the application. To overcome this, we propose an object-oriented development framework onto which it is possible to build applications that require functionalities provided by trust and reputation models. The framework is extensible and flexible enough to allow implementing an important variety of trust models. This paper presents the framework, describes its main components, and gives examples on how to use it in order to implement three different trust models.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Meltem Sonmez
PDR: A Prevention, Detection and Response Mechanism for Anomalies in Energy Control Systems
In: 7th International Conference on Critical Information Infrastructures Security (CRITIS 2012), pp. 22–33, Lillehammer, Norway, 2013.
@inproceedings{alcaraz2011critis,
title = {PDR: A Prevention, Detection and Response Mechanism for Anomalies in Energy Control Systems},
author = {Cristina Alcaraz and Meltem Sonmez},
url = {/wp-content/papers/alcaraz2011critis.pdf},
year = {2013},
date = {2013-01-01},
urldate = {2013-01-01},
booktitle = {7th International Conference on Critical Information Infrastructures Security (CRITIS 2012)},
volume = {7722},
pages = {22\textendash33},
address = {Lillehammer, Norway},
abstract = {Prevention, detection and response are nowadays considered to be three priority topics for protecting critical infrastructures, such as energy control systems. Despite attempts to address these current issues, there is still a particular lack of investigation in these areas, and in particular in dynamic and automatic proactive solutions. In this paper we propose a mechanism, which is called PDR, with the capability of anticipating anomalies, detecting anomalous behaviours and responding to them in a timely manner. PDR is based on a conglomeration of technologies and on a set of essential components with the purpose of offering situational awareness irrespective of where the system is located. In addition, the mechanism can also compute its functional capacities by evaluating its efficacy and precision in the prediction and detection of disturbances. With this, the entire system is able to know the real reliability of its services and its activity in remote substations at all times.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Estefania Etcheves Miciolino, Stephen Wolthusen
Structural Controllability of Networks for Non-Interactive Adversarial Vertex Removal
In: 8th International Conference on Critical Information Infrastructures Security, pp. 120-132, Springer Springer, Amsterdam, The Netherlands, 2013, ISSN: 0302-9743.
@inproceedings{1810,
title = {Structural Controllability of Networks for Non-Interactive Adversarial Vertex Removal},
author = {Cristina Alcaraz and Estefania Etcheves Miciolino and Stephen Wolthusen},
url = {/wp-content/papers/1810.pdf
http://link.springer.com/chapter/10.1007%2F978-3-319-03964-0_11},
issn = {0302-9743},
year = {2013},
date = {2013-01-01},
urldate = {2013-01-01},
booktitle = {8th International Conference on Critical Information Infrastructures Security},
volume = {8328},
pages = {120-132},
publisher = {Springer},
address = {Amsterdam, The Netherlands},
organization = {Springer},
abstract = {The problem of controllability of networks arises in a number of different domains, including in critical infrastructure systems where control must be maintained continuously. Recent work by Liu et al. has renewed interest in the seminal work by Lin on structural controllability, providing a graph-theoretical interpretation. This allows the identification of driver nodes capable of forcing the system into a desired state, which implies an obvious target for attackers wishing to disrupt the network control. Several methods for identifying driver nodes exist, but require undesirable computational complexity. In this paper, we therefore investigate the ability to regain or maintain controllability in the presence of adversaries able to remove vertices and implicit edges of the controllability graph. For this we rely on the POWER DOMINATING SET (PDS) formulation for identifying the control structure and study different attack strategies for multiple network models. As the construction of a PDS for a given graph is not unique, we further investigate different strategies for PDS construction, and provide a simulative evaluation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Lorena Cazorla, Cristina Alcaraz, Javier Lopez
Towards Automatic Critical Infrastructure Protection through Machine Learning
In: 8th International Conference on Critical Information Infrastructures Security, pp. 197-203, Springer Springer, Amsterdam, The Netherlands, 2013, ISSN: 0302-9743.
@inproceedings{1805,
title = {Towards Automatic Critical Infrastructure Protection through Machine Learning},
author = {Lorena Cazorla and Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1805.pdf
http://link.springer.com/chapter/10.1007%2F978-3-319-03964-0_18},
issn = {0302-9743},
year = {2013},
date = {2013-01-01},
urldate = {2013-01-01},
booktitle = {8th International Conference on Critical Information Infrastructures Security},
volume = {8328},
pages = {197-203},
publisher = {Springer},
address = {Amsterdam, The Netherlands},
organization = {Springer},
abstract = {Critical Infrastructure Protection (CIP) faces increasing challenges in number and in sophistication, which makes vital to provide new forms of protection to face every day’s threats. In order to make such protection holistic, covering all the needs of the systems from the point of view of security, prevention aspects and situational awareness should be considered. Researchers and Institutions stress the need of providing intelligent and automatic solutions for protection, calling our attention to the need of providing Intrusion Detection Systems (IDS) with intelligent active reaction capabilities. In this paper, we support the need of automating the processes implicated in the IDS solutions of the critical infrastructures and theorize that the introduction of Machine Learning (ML) techniques in IDS will be helpful for implementing automatic adaptable solutions capable of adjusting to new situations and timely reacting in the face of threats and anomalies. To this end, we study the different levels of automation that the IDS can implement, and outline a methodology to endow critical scenarios with preventive automation. Finally, we analyze current solutions presented in the literature and contrast them against the proposed methodology},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
A Trust and Reputation Framework
In: Maritta Heisel, Eda Marchetti (Ed.): Doctoral Symposium of the International Symposium on Engineering Secure Software and Systems (ESSoS-DS 2013), pp. 7-12, CEUR-WS CEUR-WS, París, 2013, ISSN: 1613-0073.
@inproceedings{moyano2013essosds,
title = {A Trust and Reputation Framework},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
editor = {Maritta Heisel and Eda Marchetti},
url = {/wp-content/papers/moyano2013essosds.pdf
http://ceur-ws.org/Vol-965/},
issn = {1613-0073},
year = {2013},
date = {2013-01-01},
urldate = {2013-01-01},
booktitle = {Doctoral Symposium of the International Symposium on Engineering Secure Software and Systems (ESSoS-DS 2013)},
volume = {965},
pages = {7-12},
publisher = {CEUR-WS},
address = {Par\'{i}s},
organization = {CEUR-WS},
series = {CEUR-WS},
abstract = {The Future Internet is posing new security challenges as their scenarios are bringing together a huge amount of stakeholders and devices that must interact under unforeseeable conditions. In addition, in these scenarios we cannot expect entities to know each other beforehand, and therefore, they must be involved in risky and uncertain collaborations. In order to minimize threats and security breaches, it is required that a well-informed decision-making process is in place, and it is here where trust and reputation can play a crucial role. Unfortunately, services and applications developers are often unarmed to address trust and reputation requirements in these scenarios. To overcome this limitation, we propose a trust and reputation framework that allows developers to create trust- and reputation-aware applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Nuñez, Isaac Agudo, Javier Lopez
Integrating OpenID with Proxy Re-Encryption to enhance privacy in cloud-based identity services
In: IEEE CloudCom 2012, pp. 241 – 248, IEEE Computer Society IEEE Computer Society, Taipei, Taiwan, 2012, ISSN: 978-1-4673-4509-5.
@inproceedings{nunez2012integrating,
title = {Integrating OpenID with Proxy Re-Encryption to enhance privacy in cloud-based identity services},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/nunez2012integrating.pdf},
doi = {10.1109/CloudCom.2012.6427551},
issn = {978-1-4673-4509-5},
year = {2012},
date = {2012-12-01},
urldate = {2012-12-01},
booktitle = {IEEE CloudCom 2012},
pages = {241 - 248},
publisher = {IEEE Computer Society},
address = {Taipei, Taiwan},
organization = {IEEE Computer Society},
abstract = {The inclusion of identity management in the cloud computing landscape represents a new business opportunity for providing what has been called Identity Management as a Service (IDaaS). Nevertheless, IDaaS introduces the same kind of problems regarding privacy and data confidentiality as other cloud services; on top of that, the nature of the outsourced information (users’ identity) is critical. Traditionally, cloud services (including IDaaS) rely only on SLAs and security policies to protect the data, but these measures have proven insufficient in some cases; recent research has employed advanced cryptographic mechanisms as an additional safeguard. Apart from this, there are several identity management schemes that could be used for realizing IDaaS systems in the cloud; among them, OpenID has gained crescent popularity because of its open and decentralized nature, which makes it a prime candidate for this task. In this paper we demonstrate how a privacy-preserving IDaaS system can be implemented using OpenID Attribute Exchange and a proxy re-encryption scheme. Our prototype enables an identity provider to serve attributes to other parties without being able to read their values. This proposal constitutes a novel contribution to both privacy and identity management fields. Finally, we discuss the performance and economical viability of our proposal.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Javier Lopez
Addressing Situational Awareness in Critical Domains of a Smart Grid
In: 6th International Conference on Network and System Security (NSS 2012), pp. 58-71, Springer-Verlag Springer-Verlag, Wu Yi Shan, Fujian, China, 2012, ISSN: 978-3-642-34600-2.
@inproceedings{1729,
title = {Addressing Situational Awareness in Critical Domains of a Smart Grid},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1729.pdf},
doi = {10.1007/978-3-642-34601-9_5},
issn = {978-3-642-34600-2},
year = {2012},
date = {2012-11-01},
urldate = {2012-11-01},
booktitle = {6th International Conference on Network and System Security (NSS 2012)},
volume = {7645},
pages = {58-71},
publisher = {Springer-Verlag},
address = {Wu Yi Shan, Fujian, China},
organization = {Springer-Verlag},
series = {LNCS 7645},
abstract = {Control and situational awareness are two very important aspects within critical control systems, since potential faults or anomalous behaviors could lead to serious consequences by hiding the real status of supervised critical infrastructures. Examples of these infrastructures are energy generation, transmission or distribution systems that belong to Smart Grid systems. Given the importance of these systems for social welfare and its economy, a situational awareness-based model, composed of a set of current technologies, is proposed in this paper. The model focuses on addressing and offering a set of minimum services for protection, such as prevention, detection, response, self-evaluation and maintenance, thereby providing a desirable protection in unplanned situations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ruben Rios, Javier Lopez
Adecuación de soluciones de anonimato al problema de la privacidad de localización en WSN
In: Urko Zurutuza, Roberto Uribeetxeberria, Ignacio Arenaza-Nuño (Ed.): XII Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2012), pp. 309-314, Donostia-San Sebastián, 2012, ISBN: 978-84-615-9933-2.
@inproceedings{Rios2012b,
title = {Adecuaci\'{o}n de soluciones de anonimato al problema de la privacidad de localizaci\'{o}n en WSN},
author = {Ruben Rios and Javier Lopez},
editor = {Urko Zurutuza and Roberto Uribeetxeberria and Ignacio Arenaza-Nu\~{n}o},
url = {/wp-content/papers/Rios2012b.pdf},
isbn = {978-84-615-9933-2},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {XII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2012)},
pages = {309-314},
address = {Donostia-San Sebasti\'{a}n},
abstract = {Los patrones de tr\'{a}fico caracter\'{i}sticos de las redes inal\'{a}mbricas de sensores (WSNs) dan lugar al problema de la privacidad de localizaci\'{o}n. De manera similar, el tr\'{a}fico de los usuarios en Internet revela informaci\'{o}n sensible que puede ser protegida mediante sistemas de comunicaci\'{o}n an\'{o}nima (ACS). Por ello, este trabajo analiza la posibilidad de adaptar las soluciones de anonimato tradicionales al problema particular de las redes de sensores. Hasta el momento estas soluciones hab\'{i}an sido rechazadas sin un an\'{a}lisis riguroso, argumentando simplemente que eran demasiado exigentes computacionalmente para los nodos sensores. Nuestros resultados demuestran que, en general, algunos ACS no cumplen los requisitos de privacidad necesarios en WSNs mientras que otros, que si los cumplen, se valen de una cantidad de recursos que superan la capacidad de los sensores.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Isaac Agudo, Javier Lopez, Gerard Draper-Gil, M. Francisca Hinarejos
Como proteger la privacidad de los usuarios en Internet. Verificación anónima de la mayoría de edad
In: XII Reunión Española sobre Criptología y Seguridad de la Información – RECSI 2012, pp. 297-302, Mondragon Mondragon, San Sebastian (Spain), 2012, ISBN: 978-84-615-9933-2.
@inproceedings{onieva2012,
title = {Como proteger la privacidad de los usuarios en Internet. Verificaci\'{o}n an\'{o}nima de la mayor\'{i}a de edad},
author = {Jose A. Onieva and Isaac Agudo and Javier Lopez and Gerard Draper-Gil and M. Francisca Hinarejos},
url = {/wp-content/papers/onieva2012.pdf},
isbn = {978-84-615-9933-2},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {XII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n - RECSI 2012},
pages = {297-302},
publisher = {Mondragon},
address = {San Sebastian (Spain)},
organization = {Mondragon},
abstract = {La identidad digital est\'{a} tomando una dimensi\'{o}n que se escapa de los esquemas tradicionales. Ha pasado de ser un mero identificador a un conjunto de caracter\'{i}sticas que nos definen. Cada vez compartimos m\'{a}s informaci\'{o}n personal en la red, en gran medida porque los modelos de interacci\'{o}n online requieren que la compartamos.
Las grandes empresas de Internet se est\'{a}n acostumbrando a tener a su disposici\'{o}n o a exigir m\'{a}s informaci\'{o}n de la estrictamente necesaria para ofrecer sus servicios. Ante esta tendencia surge el denominado principio de minimizaci\'{o}n de datos contenido en la Directiva 95/46/CE sobre protecci\'{o}n de datos que nos anima a utilizar mecanismos de protecci\'{o}n de nuestra privacidad.
En este art\'{i}culo se presenta una soluci\'{o}n para la verificaci\'{o}n an\'{o}nima de la mayor\'{i}a de edad que hace uso de la tecnolog\'{i}a de Information cards para acceder a los servicios y del DNIe en la
fase de registro con el Proveedor de Identidad.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Las grandes empresas de Internet se están acostumbrando a tener a su disposición o a exigir más información de la estrictamente necesaria para ofrecer sus servicios. Ante esta tendencia surge el denominado principio de minimización de datos contenido en la Directiva 95/46/CE sobre protección de datos que nos anima a utilizar mecanismos de protección de nuestra privacidad.
En este artículo se presenta una solución para la verificación anónima de la mayoría de edad que hace uso de la tecnología de Information cards para acceder a los servicios y del DNIe en la
fase de registro con el Proveedor de Identidad.

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
A Conceptual Framework for Trust Models
In: Simone Fischer-Hübner, Sokratis K. Katsikas, Gerald Quirchmayr (Ed.): 9th International Conference on Trust, Privacy & Security in Digital Business (TrustBus 2012), pp. 93-104, Springer Verlag Springer Verlag, Vienna, 2012, ISSN: 0302-9743.
@inproceedings{moyano2012trustbus,
title = {A Conceptual Framework for Trust Models},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
editor = {Simone Fischer-H\"{u}bner and Sokratis K. Katsikas and Gerald Quirchmayr},
url = {/wp-content/papers/moyano2012trustbus.pdf},
doi = {10.1007/978-3-642-32287-7},
issn = {0302-9743},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {9th International Conference on Trust, Privacy \& Security in Digital Business (TrustBus 2012)},
volume = {7449},
pages = {93-104},
publisher = {Springer Verlag},
address = {Vienna},
organization = {Springer Verlag},
series = {LNCS},
abstract = {During the last twenty years, a huge amount of trust and reputation models have been proposed, each of them with their own particularities and targeting different domains. While much effort has been made in defining ever-increasing complex models, little attention has been paid to abstract away the particularities of these models into a common set of easily understandable concepts. We propose a conceptual framework for computational trust models that will be used for analyzing their features and for comparing heterogeneous and relevant trust models.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Jorge Cuellar, Javier Lopez
Robust Probabilistic Fake Packet Injection for Receiver-Location Privacy in WSN
In: Sara Foresti, Moti Yung, Fabio Martinelli (Ed.): 17th European Symposium on Research in Computer Security (ESORICS 2012), pp. 163-180, Springer Springer, Pisa, Italy, 2012, ISSN: 0302-9743.
@inproceedings{Rios2012d,
title = {Robust Probabilistic Fake Packet Injection for Receiver-Location Privacy in WSN},
author = {Ruben Rios and Jorge Cuellar and Javier Lopez},
editor = {Sara Foresti and Moti Yung and Fabio Martinelli},
url = {/wp-content/papers/Rios2012d.pdf},
doi = {10.1007/978-3-642-33167-1_10},
issn = {0302-9743},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {17th European Symposium on Research in Computer Security (ESORICS 2012)},
volume = {7459},
pages = {163-180},
publisher = {Springer},
address = {Pisa, Italy},
organization = {Springer},
series = {LNCS},
abstract = {The singular communication model in wireless sensor networks (WSNs) originate pronounced traffic patterns that allow a local observer to deduce the location of the base station, which must be kept secret for both strategical and security reasons. In this work we present a new receiver-location privacy solution called HISP (Homogenous Injection for Sink Privacy). Our scheme is based on the idea of hiding the flow of real traffic by carefully injecting fake traffic to homogenize the transmissions from a node to its neighbors. This process is guided by a lightweight probabilistic approach ensuring that the adversary cannot decide with sufficient precision in which direction to move while maintaining a moderate amount of fake traffic. Our system is both validated analytically and experimentally through simulations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Gerardo Fernandez
Sistema Colaborativo de Detección y Reacción ante Intrusiones basado en Intel vPro
In: XII Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2012), pp. 45-50, San Sebastián, 2012, ISBN: 978-84-615-9933-2.
@inproceedings{NF_RECSI12,
title = {Sistema Colaborativo de Detecci\'{o}n y Reacci\'{o}n ante Intrusiones basado en Intel vPro},
author = {Ana Nieto and Gerardo Fernandez},
url = {/wp-content/papers/NF_RECSI12.pdf},
isbn = {978-84-615-9933-2},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {XII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2012)},
pages = {45-50},
address = {San Sebasti\'{a}n},
abstract = {En este trabajo proponemos una plataforma para el desarrollo de un sistema colaborativo para la detecci\'{o}n y reacci\'{o}n ante intrusiones, empleando como base las tecnolog\'{i}as presentes en Intel vPro. La soluci\'{o}n presentada est\'{a} dirigida a solventar la necesidad de implantaci\'{o}n de nuevas tecnolog\'{i}as que posibiliten la reacci\'{o}n ante ataques, independientemente del sistema operativo usado. Con este fin, en este trabajo abordamos tres puntos fundamentales: la detecci\'{o}n de intrusiones colaborativa, la respuesta autom\'{a}tica de los nodos ante la detecci\'{o}n de una intrusi\'{o}n y el uso de herramientas que posibiliten asegurar la confianza en un nodo. En un sistema colaborativo como el que se propone aqu\'{i}, un aspecto clave para la seguridad es la protecci\'{o}n de las comunicaciones entre los mecanismos de detecci\'{o}n y reacci\'{o}n frente a intrusiones. La modificaci\'{o}n o el simple acceso a los datos intercambiados por tales sistemas supone un grave riesgo para la seguridad del entorno. Como resultado hemos desarrollado un prototipo preliminar para probar la soluci\'{o}n propuesta en un escenario de ataque real.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Gerard Draper-Gil, Josep L. Ferrer-Gomila, M. Francisca Hinarejos, Jose A. Onieva, Javier Lopez
Un protocolo para la firma de contratos en escenarios multi-two-party con atomicidad
In: XII Reunión Española de Criptología y Seguridad de la Información, pp. 357-362, 2012, ISBN: 978-84-615-9933-2.
@inproceedings{422,
title = {Un protocolo para la firma de contratos en escenarios multi-two-party con atomicidad},
author = {Gerard Draper-Gil and Josep L. Ferrer-Gomila and M. Francisca Hinarejos and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/422.pdf},
isbn = {978-84-615-9933-2},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {XII Reuni\'{o}n Espa\~{n}ola de Criptolog\'{i}a y Seguridad de la Informaci\'{o}n},
pages = {357-362},
abstract = {Los avances tecnol\'{o}gicos que est\'{a} experimentando el mundo digital (Internet, comunicaciones, etc.) est\'{a}n acercando a consumidores y proveedores. Los proveedores pueden ofrecer sus productos directamente a los consumidores finales, y \'{e}stos son capaces de acceder a los proveedores desde cualquier lugar y en cualquier momento. A la hora de adquirir productos o servicios, esta facilidad de acceso permite a los consumidores consultar distintas ofertas de diferentes proveedores. Pero en el caso de que el consumidor quiera m\'{u}ltiples productos, como los paquetes tur\'{i}sticos, formados por vuelos, hoteles, excursiones, etc, los consumidores carecen de herramientas que les permitan realizar la contrataci\'{o}n multi-two-party de manera at\'{o}mica. En este art\'{i}culo presentamos un protocolo de firma de contratos multi-two-party con atomicidad que garantiza la equitatividad de todas las partes.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Farhan Siddiqui, Sherali Zeadally, Cristina Alcaraz, Samara Galvao
Smart Grid Privacy: Issues and Solutions
In: 21st International Conference on Computer Communications and Networks (ICCCN), pp. 1-5, IEEE Computer Society IEEE Computer Society, Munich, Germany, 2012, ISBN: 978-1-4673-1543-2.
@inproceedings{alcaraz2012b,
title = {Smart Grid Privacy: Issues and Solutions},
author = {Farhan Siddiqui and Sherali Zeadally and Cristina Alcaraz and Samara Galvao},
url = {http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp=\&arnumber=6289304\&contentType=Conference+Publications\&openedRefinements%3D*%26pageNumber%3D7%26rowsPerPage%3D100%26queryText%3D%28smart+grid%29},
doi = {10.1109/ICCCN.2012.6289304},
isbn = {978-1-4673-1543-2},
year = {2012},
date = {2012-07-01},
urldate = {2012-07-01},
booktitle = {21st International Conference on Computer Communications and Networks (ICCCN)},
pages = {1-5},
publisher = {IEEE Computer Society},
address = {Munich, Germany},
organization = {IEEE Computer Society},
abstract = {Migration to an electronically controlled electrical grid to transmit, distribute, and deliver power to consumers has helped enhance the reliability and efficiency of conventional electricity systems. At the same time, this digitally enabled technology called the Smart Grid has brought new challenges to businesses and consumers alike. A key component of such a grid is the smart-metering technology, which is used to collect energy consumption data from homes and transmitting it back to power distributors. A crucial concern is the privacy related to the collection and use of energy consumption data. We present an analysis of Smart Grid privacy issues and discuss recently proposed solutions that can protect the privacy of Smart Grid users.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Jose A. Onieva, Javier Lopez
HIDE_DHCP: Covert Communications Through Network Configuration Messages
In: Dimitris Gritzalis, Steven Furnell, Marianthi Theoharidou (Ed.): Proceedings of the 27th IFIP TC 11 International Information Security and Privacy Conference (SEC 2012), pp. 162-173, Springer Boston Springer Boston, Heraklion, Crete, Greece, 2012, ISSN: 1868-4238.
@inproceedings{Rios2012,
title = {HIDE_DHCP: Covert Communications Through Network Configuration Messages},
author = {Ruben Rios and Jose A. Onieva and Javier Lopez},
editor = {Dimitris Gritzalis and Steven Furnell and Marianthi Theoharidou},
url = {/wp-content/papers/Rios2012.pdf},
doi = {10.1007/978-3-642-30436-1_14},
issn = {1868-4238},
year = {2012},
date = {2012-06-01},
urldate = {2012-06-01},
booktitle = {Proceedings of the 27th IFIP TC 11 International Information Security and Privacy Conference (SEC 2012)},
volume = {376},
pages = {162-173},
publisher = {Springer Boston},
address = {Heraklion, Crete, Greece},
organization = {Springer Boston},
series = {IFIP AICT},
abstract = {Covert channels are a form of hidden communication that may violate the integrity of systems. Since their birth in multilevel security systems in the early 70’s they have evolved considerably, such that new solutions have appeared for computer networks mainly due to vague protocols specifications. We analyze a protocol extensively used today, the Dynamic Host Configuration Protocol (DHCP), in search of new forms of covert communication. From this analysis we observe several features that can be effectively exploited for subliminal data transmission. This results in the implementation of HIDE_DHCP, which integrates three covert channels that accommodate to different stealthiness and bandwidth requirements},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jorge Cuellar, Martin Ochoa, Ruben Rios
Indistinguishable Regions in Geographic Privacy
In: Sascha Ossowski, Paola Lecca (Ed.): Proceedings of the 27th Annual ACM Symposium on Applied Computing (SAC 2012), pp. 1463-1469, ACM ACM, Riva del Garda (Trento), Italy, 2012, ISBN: 978-1-4503-0857-1.
@inproceedings{Cuellar2012,
title = {Indistinguishable Regions in Geographic Privacy},
author = {Jorge Cuellar and Martin Ochoa and Ruben Rios},
editor = {Sascha Ossowski and Paola Lecca},
url = {/wp-content/papers/Cuellar2012.pdf},
doi = {10.1145/2245276.2232010},
isbn = {978-1-4503-0857-1},
year = {2012},
date = {2012-03-01},
urldate = {2012-03-01},
booktitle = {Proceedings of the 27th Annual ACM Symposium on Applied Computing (SAC 2012)},
pages = {1463-1469},
publisher = {ACM},
address = {Riva del Garda (Trento), Italy},
organization = {ACM},
abstract = {The ubiquity of positioning devices poses a natural security challenge: users want to take advantage of location-related services as well as social sharing of their position but at the same time have security concerns about how much information should be shared about their exact position. This paper discusses different location-privacy problems, their formalization and the novel notion of indistinguishability regions that allows one to proof that a given obfuscation function provides a good trade-off between location sharing and privacy.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Javier Lopez
Security and QoS tradeoffs: towards a FI perspective
In: Advanced Information Networking and Applications Workshops (WAINA), 2012 26th International Conference on, pp. 745-750, IEEE IEEE, Fukuoka (Japan), 2012, ISBN: 978-0-7695-4652-0/12.
@inproceedings{Nieto2012b,
title = {Security and QoS tradeoffs: towards a FI perspective},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/Nieto2012b.pdf},
doi = {10.1109/WAINA.2012.204},
isbn = {978-0-7695-4652-0/12},
year = {2012},
date = {2012-03-01},
urldate = {2012-03-01},
booktitle = {Advanced Information Networking and Applications Workshops (WAINA), 2012 26th International Conference on},
pages = {745-750},
publisher = {IEEE},
address = {Fukuoka (Japan)},
organization = {IEEE},
abstract = {Motivated by the growing convergence of diverse types of networks and the raise of new concepts such as Future Internet (FI), in this paper we present an analysis of current research on the development of security mechanisms in a tradeoff with Quality of Service (QoS) mechanisms. More precisely, we pay attention to the Security and QoS problems in resource-constrained networks that are candidates to be an important part of the FI due to their proximity to the user or because of their contribution to the information society. We analyse the current state of the research on security and QoS in the integration of sensors, MANET and cellular networks, with the aim of providing a critical point of view, allowing us to assess whether it is possible that such integration of networks is both secure and efficient.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ana Nieto, Javier Lopez
Traffic Classifier for Heterogeneous and Cooperative Routing through Wireless Sensor Networks
In: Advanced Information Networking and Applications Workshops (WAINA), 2012 26th International Conference on, pp. 607-612, IEEE IEEE, Fukuoka (Japan), 2012, ISBN: 978-0-7695-4652-0/12.
@inproceedings{Nieto2012a,
title = {Traffic Classifier for Heterogeneous and Cooperative Routing through Wireless Sensor Networks},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/Nieto2012a.pdf},
doi = {10.1109/WAINA.2012.202},
isbn = {978-0-7695-4652-0/12},
year = {2012},
date = {2012-03-01},
urldate = {2012-03-01},
booktitle = {Advanced Information Networking and Applications Workshops (WAINA), 2012 26th International Conference on},
pages = {607-612},
publisher = {IEEE},
address = {Fukuoka (Japan)},
organization = {IEEE},
abstract = {Wireless Sensor Networks (WSN) are networks composed of autonomous devices manufactured to solve a specific problem, with limited computational capabilities and resource-constrained (e.g. limited battery). WSN are used to monitor physical or environmental conditions within an area (e.g. temperature, humidity). The popularity of the WSN is growing, precisely due to the wide range of sensors available. As a result, these networks are being deployed as part of several infrastructures. However, sensors are designed to collaborate only with sensors of the same type. In this sense, taking advantage of the heterogeneity of WSN in order to provide common services, like it is the case of routing, has not been sufficiently considered. For this reason, in this paper we propose a routing protocol based on traffic classification and role-assignment to enable heterogeneous WSN for cooperation. Our approach considers both QoS requirements and lifetime maximization to allow the coexistence of different applications in the heterogeneous network infrastructure.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Isaac Agudo, Javier Lopez
A Task Ordering Approach for Automatic Trust Establishment
In: Gilles Barthe, Ben Livshits, Riccardo Scandariato (Ed.): Proceedings of the 2012 International Symposium on Engineering Secure Software and Systems (ESSoS 2012), pp. 76–89, Springer Springer, Eindhoven, The Netherlands, 2012.
@inproceedings{Moyano_ESSoS12,
title = {A Task Ordering Approach for Automatic Trust Establishment},
author = {Francisco Moyano and Carmen Fernandez-Gago and Isaac Agudo and Javier Lopez},
editor = {Gilles Barthe and Ben Livshits and Riccardo Scandariato},
url = {/wp-content/papers/Moyano_ESSoS12.pdf},
doi = {10.1007/978-3-642-28166-2_8},
year = {2012},
date = {2012-02-01},
urldate = {2012-02-01},
booktitle = {Proceedings of the 2012 International Symposium on Engineering Secure Software and Systems (ESSoS 2012)},
volume = {7159},
pages = {76\textendash89},
publisher = {Springer},
address = {Eindhoven, The Netherlands},
organization = {Springer},
series = {LNCS},
abstract = {Trust has become essential in computer science as a way of assisting the process of decision-making, such as access control. In any system, several tasks may be performed, and each of these tasks might pose different associated trust values between the entities of the system. For instance, in a file system, reading and overwriting a file are two tasks that pose different trust values between the users who can carry out these tasks. In this paper, we propose a simple model for automatically establishing trust relationships between entities considering an established order among tasks.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
Implementing Trust and Reputation Systems: A Framework for Developers’ Usage
In: International Workshop on Quantitative Aspects in Security Assurance, Pisa, 2012.
@inproceedings{moyano12qasa,
title = {Implementing Trust and Reputation Systems: A Framework for Developers’ Usage},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/moyano12qasa.pdf},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
booktitle = {International Workshop on Quantitative Aspects in Security Assurance},
address = {Pisa},
abstract = {During the last decades, a huge amount of trust and reputation models have been proposed, each of them with their own particularities and targeting different domains. While much effort has been made in defining ever-increasing complex models, little attention has been paid to abstract away the particularities of these models into a common set of easily understandable concepts. We propose a conceptual framework for computational trust models that is used for developing a component-oriented development framework that aims to assist developers during the implementation phase.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Pablo Najera, Rodrigo Roman, Javier Lopez
Secure architecure for the integration of RFID and sensors in personal networks
In: 7th International Workshop on Security and Trust Management (STM’11), pp. 207-222, Springer Springer, Copenhagen, Denmark, 2012, ISBN: 978-3-642-29962-9.
@inproceedings{Najera_STM11,
title = {Secure architecure for the integration of RFID and sensors in personal networks},
author = {Pablo Najera and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Najera_STM11.pdf},
doi = {10.1007/978-3-642-29963-6_15},
isbn = {978-3-642-29962-9},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
booktitle = {7th International Workshop on Security and Trust Management (STM’11)},
volume = {7170},
pages = {207-222},
publisher = {Springer},
address = {Copenhagen, Denmark},
organization = {Springer},
series = {LNCS},
abstract = {The secure integration of RFID technology into the personal network paradigm, as a context-aware technology which complements body sensor networks, would provide notable benefits to applications and potential services of the PN. RFID security as an independent technology is reaching an adequate maturity level thanks to research in recent years; however, its integration into the PN model, interaction with other network resources, remote users and service providers requires a specific security analysis and a PN architecture prepared to support these resource-constrained pervasive technologies. This paper provides such PN architecture and analysis. Aspects such as the management of personal tags as members of the PN, the authentication and secure communication of PN nodes and remote users with the context-aware technologies, and the enforcement of security and privacy policies are discussed in the architecture.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Francisco Moyano, Carmen Fernandez-Gago, Javier Lopez
Service-Oriented Trust and Reputation Architecture
In: Jorge Cuellar, Nora Koch (Ed.): Proceedings of the Doctoral Symposium of the International Symposium on Engineering Secure Software and Systems (ESSoS-DS 2012), pp. 41-46, CEUR-WS CEUR-WS, Eindhoven, 2012, ISSN: 1613-0073, (Partner:UMA, Project:NESSoS).
@inproceedings{moyano2012essosds,
title = {Service-Oriented Trust and Reputation Architecture},
author = {Francisco Moyano and Carmen Fernandez-Gago and Javier Lopez},
editor = {Jorge Cuellar and Nora Koch},
url = {/wp-content/papers/moyano2012essosds.pdf
http://ceur-ws.org/Vol-834/paper7_essosds2012.pdf},
issn = {1613-0073},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
booktitle = {Proceedings of the Doctoral Symposium of the International Symposium on Engineering Secure Software and Systems (ESSoS-DS 2012)},
volume = {834},
pages = {41-46},
publisher = {CEUR-WS},
address = {Eindhoven},
organization = {CEUR-WS},
series = {CEUR-WS},
abstract = {As the Future Internet arrives, more complex, service-based applications are spreading. These applications pose several challenges, including the huge amount of entities that must interact and their het- erogeneity. The success of these applications depends on the collaboration and communication of these entities, that might belong to different or- ganizations and administrative domains. Therefore, trust and reputation become two crucial issues. We propose the specification and design of a service-based security architecture that stresses the delivery of trust and reputation services to any application that might require them.},
note = {Partner:UMA, Project:NESSoS},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
James Clarke, Rodrigo Roman, Abhishek Sharma, Javier Lopez, Neeraj Suri
Trust & Security RTD in the Internet of Things: Opportunities for International Cooperation
In: Proceedings of the First International Conference on Security of Internet of Things, pp. 172–178, ACM ACM, New York, NY, USA, 2012, ISBN: 978-1-4503-1822-8.
@inproceedings{Clarke2012,
title = {Trust \& Security RTD in the Internet of Things: Opportunities for International Cooperation},
author = {James Clarke and Rodrigo Roman and Abhishek Sharma and Javier Lopez and Neeraj Suri},
url = {http://doi.acm.org/10.1145/2490428.2490452},
doi = {10.1145/2490428.2490452},
isbn = {978-1-4503-1822-8},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
booktitle = {Proceedings of the First International Conference on Security of Internet of Things},
pages = {172\textendash178},
publisher = {ACM},
address = {New York, NY, USA},
organization = {ACM},
series = {SecurIT ’12},
abstract = {While there has been considerable progress in the research and technological development (RTD) of the Internet of Things (IoT), there is still considerable RTD required by international communities for the trust, privacy and security research challenges arising from the constitution of the IoT architectures, infrastructures, communications, devices, objects, applications and services. In this paper, we present an thorough analysis of the ongoing and future RTD work, specifically in Europe, regarding trust, privacy and security of the Internet of Things with a view towards enabling international cooperation efforts around the globe to solve these major research challenges.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ana Nieto, Javier Lopez
Security and QoS relationships in Mobile Platforms
In: The 4th FTRA International Conference on Computer Science and its Applications (CSA 2012), pp. 13-21, Springer Netherlands Springer Netherlands, Jeju (Korea), 2012, ISBN: 978-94-007-5699-1.
@inproceedings{Nieto2012c,
title = {Security and QoS relationships in Mobile Platforms},
author = {Ana Nieto and Javier Lopez},
url = {/wp-content/papers/Nieto2012c.pdf},
doi = {10.1007/978-94-007-5699-1_2},
isbn = {978-94-007-5699-1},
year = {2012},
date = {2012-00-01},
urldate = {2012-00-01},
booktitle = {The 4th FTRA International Conference on Computer Science and its Applications (CSA 2012)},
volume = {203},
pages = {13-21},
publisher = {Springer Netherlands},
address = {Jeju (Korea)},
organization = {Springer Netherlands},
series = {Lecture Notes in Electrical Engineering},
abstract = {Mobile platforms are becoming a fundamental part of the user’s daily life. The human-device relationship converts the devices in a repository of personal data that may be stolen or modified by malicious users. Moreover, wireless capabilities open the door to several malicious devices, and mobility represents an added difficulty in the detection of malicious behavior and in the prevention of the same. Furthermore, smartphones are subject to quality of service (QoS) restrictions, due to the user needs for multimedia applications and, in general, the need to be always-on. However, Security and QoS requirements are largely confronted and the mobility and heterogeneous paradigm on the Future Internet makes its coexistence even more difficult, posing new challenges to overcome. We analyze the principal challenges related with Security and QoS tradeoffs in mobile platforms. As a result of our analysis we provide parametric relationships between security and QoS parameters focused on mobile platforms.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Neumann Libor, Tomas Halman, Rotek Pavel, Alexander Boettcher, Julian Stecklina, Michal Sojka, David Nuñez, Isaac Agudo
Strong Authentication of Humans and Machines in Policy Controlled Cloud Computing Environment Using Automatic Cyber Identity
In: Norbert Pohlmann, Helmut Reimer, Wolfgang Schneider (Ed.): Information Security Solutions Europe 2012, pp. 195-206, Springer Vieweg Springer Vieweg, Brussels, Belgium, 2012, ISBN: 978-3-658-00332-6.
@inproceedings{neumann2012strong,
title = {Strong Authentication of Humans and Machines in Policy Controlled Cloud Computing Environment Using Automatic Cyber Identity},
author = {Neumann Libor and Tomas Halman and Rotek Pavel and Alexander Boettcher and Julian Stecklina and Michal Sojka and David Nu\~{n}ez and Isaac Agudo},
editor = {Norbert Pohlmann and Helmut Reimer and Wolfgang Schneider},
doi = {10.1007/978-3-658-00333-3_19},
isbn = {978-3-658-00332-6},
year = {2012},
date = {2012-00-01},
urldate = {2012-00-01},
booktitle = {Information Security Solutions Europe 2012},
pages = {195-206},
publisher = {Springer Vieweg},
address = {Brussels, Belgium},
organization = {Springer Vieweg},
abstract = {The paper describes the experience with integration of automatic cyber identity technology with policy controlled virtualisation environment. One identity technology has been used to enable strong authentication of users (human beings) as well as machines (host systems) to the virtualization management system. The real experimental evaluation has been done in PASSIVE project (Policy-Assessed system-level Security of Sensitive Information processing in Virtualised Environments - SEVENTH FRAMEWORK PROGRAMME THEME ICT-2009.1.4 INFORMATION AND COMMUNICATION TECHNOLOGIES - Small or medium-scale focused research project - Grant agreement no.: 257644).},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Pablo Najera, Rodrigo Roman, Javier Lopez
Acceso seguro a nodos RFID en una arquitectura de red personal
In: Klaus Hackbarth, Ramón Agüero, Roberto Sanz (Ed.): X Jornadas de Ingeniería Telemática (JITEL 2011), pp. 104 – 111, Universidad de Cantabria Universidad de Cantabria, Santander, Spain, 2011, ISBN: 978-84-694-5948-5.
@inproceedings{Najera_JITEL11,
title = {Acceso seguro a nodos RFID en una arquitectura de red personal},
author = {Pablo Najera and Rodrigo Roman and Javier Lopez},
editor = {Klaus Hackbarth and Ram\'{o}n Ag\"{u}ero and Roberto Sanz},
isbn = {978-84-694-5948-5},
year = {2011},
date = {2011-09-01},
urldate = {2011-09-01},
booktitle = {X Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL 2011)},
pages = {104 - 111},
publisher = {Universidad de Cantabria},
address = {Santander, Spain},
organization = {Universidad de Cantabria},
abstract = {El paradigma de red personal (PN) permitir\'{a} la interacci\'{o}n y colaboraci\'{o}n del creciente abanico de dispositivos personales. Con tal fin la PN ha de integrar en su seno m\'{u}ltiples tecnolog\'{i}as heterog\'{e}neas con diversas capacidades computacionales y de comunicaci\'{o}n de forma segura. En particular, la incorporaci\'{o}n de la tecnolog\'{i}a RFID en objetos personales conlleva m\'{u}ltiples riesgos de seguridad y privacidad que han suscitado un elevado inter\'{e}s de la comunidad investigadora en los \'{u}ltimos a\~{n}os. M\'{a}s all\'{a} de su seguridad de forma aislada, su integraci\'{o}n en la PN y la interacci\'{o}n de \'{e}sta con redes de \'{a}rea extensa como Internet of Things requieren una arquitectura de red personal adecuada para tal contexto. Este art\'{i}culo proporciona los fundamentos de tal arquitectura segura incluyendo el an\'{a}lisis de aspectos como la incorporaci\'{o}n e inicializaci\'{o}n de las restringidas etiquetas RFID en la red personal, la autenticaci\'{o}n tanto de miembros de la PN como de usuarios y servicios remotos en su acceso a las tecnolog\'{i}as de contexto, el control de las pol\'{i}ticas de privacidad y el establecimiento de canales seguros de comunicaci\'{o}n supervisados.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Naci Dai, Jesus Bermejo, Felix Cuadrado Latasa, Alejandra Ruiz López, Isaac Agudo, Elmar Zeeb, Jan Krueger, Oliver Dohndorf, Wolfgang Thronicke, Christoph Fiehe, Anna Litvina
OSAMI Commons: An open dynamic services platform for ambient intelligence
In: IEEE 16th Conference on Emerging Technologies Factory Automation (ETFA 2011), pp. 1-10, IEEE IEEE, Toulouse, France, 2011, ISSN: 1946-0740.
@inproceedings{6059235,
title = {OSAMI Commons: An open dynamic services platform for ambient intelligence},
author = {Naci Dai and Jesus Bermejo and Felix Cuadrado Latasa and Alejandra Ruiz L\'{o}pez and Isaac Agudo and Elmar Zeeb and Jan Krueger and Oliver Dohndorf and Wolfgang Thronicke and Christoph Fiehe and Anna Litvina},
doi = {10.1109/ETFA.2011.6059235},
issn = {1946-0740},
year = {2011},
date = {2011-09-01},
urldate = {2011-09-01},
booktitle = {IEEE 16th Conference on Emerging Technologies Factory Automation (ETFA 2011)},
pages = {1-10},
publisher = {IEEE},
address = {Toulouse, France},
organization = {IEEE},
abstract = {Today we live in an environment surrounded with networked converging devices. Human computer interactions are becoming personalized and a new concept of a global and cross-domain platform is emerging to exploit the full potential of the network in all business areas. In this convergence process, the software platform should be able to personalize itself dynamically in devices according to the context. OSAmI-Commons, an ITEA2 project for developing an open-source common approach to such a dynamic service-based platform, allows any type of device to connect and exchange information and services. OSAMI consortium is contributing to defining the foundations of a cross-platform open-services ecosystem. The sustainability of this platform is an objective beyond the project duration.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Isaac Agudo, David Nuñez, Gabriele Giammatteo, Panagiotis Rizomiliotis, Costas Lambrinoudakis
Cryptography Goes to the Cloud
In: Changhoon Lee, Jean-Marc Seigneur, James J. Park, Roland R. Wagner (Ed.): 1st International Workshop on Security and Trust for Applications in Virtualised Environments (STAVE 2011), pp. 190-197, Springer Springer, 2011, ISBN: 978-3-642-22364-8.
@inproceedings{agudo2011cryptography,
title = {Cryptography Goes to the Cloud},
author = {Isaac Agudo and David Nu\~{n}ez and Gabriele Giammatteo and Panagiotis Rizomiliotis and Costas Lambrinoudakis},
editor = {Changhoon Lee and Jean-Marc Seigneur and James J. Park and Roland R. Wagner},
url = {/wp-content/papers/agudo2011cryptography.pdf},
doi = {10.1007/978-3-642-22365-5_23},
isbn = {978-3-642-22364-8},
year = {2011},
date = {2011-06-01},
urldate = {2011-06-01},
booktitle = {1st International Workshop on Security and Trust for Applications in Virtualised Environments (STAVE 2011)},
volume = {187},
pages = {190-197},
publisher = {Springer},
organization = {Springer},
series = {Communications in Computer and Information Science},
abstract = {In this paper we identify some areas where cryptography can help a rapid adoption of cloud computing. Although secure storage has already captured the attention of many cloud providers, offering a higher level of protection for their customer’s data, we think that more advanced techniques such as searchable encryption and secure outsourced computation will become popular in the near future, opening the doors of the Cloud to customers with higher security requirements.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David Nuñez, Isaac Agudo, Prokopios Drogkaris, Stefanos Gritzalis
Identity Management Challenges for Intercloud Applications
In: 1st International Workshop on Security and Trust for Applications in Virtualised Environments (STAVE 2011), pp. 198-204, Crete (Greece), 2011.
@inproceedings{DNunez11,
title = {Identity Management Challenges for Intercloud Applications},
author = {David Nu\~{n}ez and Isaac Agudo and Prokopios Drogkaris and Stefanos Gritzalis},
url = {/wp-content/papers/DNunez11.pdf},
doi = {10.1007/978-3-642-22365-5_24},
year = {2011},
date = {2011-06-01},
urldate = {2011-06-01},
booktitle = {1st International Workshop on Security and Trust for Applications in Virtualised Environments (STAVE 2011)},
volume = {187},
pages = {198-204},
address = {Crete (Greece)},
abstract = {Intercloud notion is gaining a lot of attention lately from both enterprise and academia, not only because of its benefits and expected results but also due to the challenges that it introduces regarding interoperability and standardisation. Identity management services are one of the main candidates to be outsourced into the Intercloud, since they are one of the most common services needed by companies and organisations. This paper addresses emerging identity management challenges that arise in intercloud formations, such as naming, identification, interoperability, identity life cycle management and single sign-on.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Olga Leon, Rodrigo Roman, Juan Hernandez Serrano
Towards a Cooperative Intrusion Detection System for Cognitive Radio Networks
In: Workshop on Wireless Cooperative Network Security (WCNS’11), Springer Springer, 2011.
@inproceedings{Leon11,
title = {Towards a Cooperative Intrusion Detection System for Cognitive Radio Networks},
author = {Olga Leon and Rodrigo Roman and Juan Hernandez Serrano},
url = {/wp-content/papers/Leon11.pdf
http://www.networking2011.org/workshops/WCNS.html},
doi = {10.1007/978-3-642-23041-7_22},
year = {2011},
date = {2011-05-01},
urldate = {2011-05-01},
booktitle = {Workshop on Wireless Cooperative Network Security (WCNS’11)},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Cognitive Radio Networks (CRNs) arise as a promising solution to the scarcity of spectrum. By means of cooperation and smart decisions influenced by previous knowledge, CRNs are able to detect and profit from the best spectrum opportunities without interfering primary licensed users. However, besides the well-known attacks to wireless networks, new attacks threat this type of networks. In this paper we analyze these threats and propose a set of intrusion detection modules targeted to detect them. Provided method will allow a CRN to identify attack sources and types of attacks, and to properly react against them.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Javier Lopez, Cristina Alcaraz, Hsiao-Hwa Chen
SenseKey – Simplifying the Selection of Key Management Schemes for Sensor Networks
In: 5th International Symposium on Security and Multimodality in Pervasive Environments (SMPE’11), IEEE IEEE, Singapore, 2011.
@inproceedings{Roman11SK,
title = {SenseKey - Simplifying the Selection of Key Management Schemes for Sensor Networks},
author = {Rodrigo Roman and Javier Lopez and Cristina Alcaraz and Hsiao-Hwa Chen},
url = {/wp-content/papers/Roman11SK.pdf
http://www.ftrai.org/smpe2011/},
doi = {10.1109/WAINA.2011.78},
year = {2011},
date = {2011-03-01},
urldate = {2011-03-01},
booktitle = {5th International Symposium on Security and Multimodality in Pervasive Environments (SMPE’11)},
publisher = {IEEE},
address = {Singapore},
organization = {IEEE},
abstract = {Key Management Schemes (KMS) are a very important security mechanism for Wireless Sensor Networks (WSN), as they are used to manage the credentials (i.e. secret keys) that are needed by the security primitives. There is a large number of available KMS protocols in the literature, but it is not clear what should network designers do to choose the most suitable protocol for the needs of their applications. In this paper, we consider that given a certain set of application requirements, the network designer can check which properties comply with those requirements and select the KMS protocols that contains those particular properties. Therefore, we study the relationship between requirements and properties, and we provide a web tool, the SenseKey tool, that can be used to automatically obtain an optimal set of KMS protocols.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Wouter Joosen, Javier Lopez, Fabio Martinelli, Fabio Massacci
Engineering Secure Future Internet Services
In: Future Internet Assembly 2011: Achievements and Technological Promises (FIA 2011), pp. 177-191, Springer Berlin Heidelberg Springer Berlin Heidelberg, Budapest, 2011, ISSN: 0302-9743.
@inproceedings{1622,
title = {Engineering Secure Future Internet Services},
author = {Wouter Joosen and Javier Lopez and Fabio Martinelli and Fabio Massacci},
url = {/wp-content/papers/1622.pdf},
issn = {0302-9743},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
booktitle = {Future Internet Assembly 2011: Achievements and Technological Promises (FIA 2011)},
volume = {6656},
pages = {177-191},
publisher = {Springer Berlin Heidelberg},
address = {Budapest},
organization = {Springer Berlin Heidelberg},
series = {LNCS},
abstract = {In this paper we analyze the need and the opportunity forestablishing a discipline for engineering secure Future Internet Services,typically based on research in the areas of software engineering, of serviceengineering and security engineering. Generic solutions that ignore thecharacteristics of Future Internet services will fail, yet it seems obviousto build on best practices and results that have emerged from variousresearch communities.The paper sketches various lines of research and strands within each lineto illustrate the needs and to sketch a community wide research plan. Itwill be essential to integrate various activities that need to be addressedin the scope of secure service engineering into comprehensive softwareand service life cycle support. Such a life cycle support must deliverassurance to the stakeholders and enable risk and cost management forthe business stakeholders in particular. The paper should be considereda call for contribution to any researcher in the related sub domains inorder to jointly enable the security and trustworthiness of Future Internetservices.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David G. Rosado, Eduardo Fernandez-Medina, Mario Piattini, Javier Lopez
Analysis of Secure Mobile Grid Systems: A systematic approach
In: XVI Jornadas de Ingeniería del Software y Bases de Datos (JISBD 2011), pp. 487-491, Servizo de publicacións da Universidade da Coruña Servizo de publicacións da Universidade da Coruña, A Coruña, Spain, 2011, ISBN: 978-84-9749-486-1.
@inproceedings{1642,
title = {Analysis of Secure Mobile Grid Systems: A systematic approach},
author = {David G. Rosado and Eduardo Fernandez-Medina and Mario Piattini and Javier Lopez},
url = {/wp-content/papers/1642.pdf},
isbn = {978-84-9749-486-1},
year = {2011},
date = {2011-00-01},
urldate = {2011-00-01},
booktitle = {XVI Jornadas de Ingenier\'{i}a del Software y Bases de Datos (JISBD 2011)},
pages = {487-491},
publisher = {Servizo de publicaci\'{o}ns da Universidade da Coru\~{n}a},
address = {A Coru\~{n}a, Spain},
organization = {Servizo de publicaci\'{o}ns da Universidade da Coru\~{n}a},
abstract = {Developing software through systematic processes is becoming more and more important due to the growing complexity of software development. It is important that the development process used integrates security aspects from the first stages at the same level as other functional and non-functional requirements. The identification of security aspects in the first stages ensures a more robust development and permits the security requirements to be perfectly coupled with the design and the rest of the system’s requirements. Systems which are based on Grid Computing are a kind of systems that have clear differentiating features in which security is a highly important aspect. Generic development processes are sometimes used to develop Grid specific systems without taking into consideration either the subjacent technological environment or the special features and particularities of these specific systems. In fact, the majority of existing Grid applications have been built without a systematic development process and are based on ad hoc developments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Isaac Agudo, David Nuñez, Javier Lopez
Managing Incidents in Smart Grids à la Cloud
In: IEEE CloudCom 2011, pp. 527-531, IEEE Computer Society IEEE Computer Society, Athens, Greece, 2011, ISBN: 978-0-7695-4622-3.
@inproceedings{1643,
title = {Managing Incidents in Smart Grids \`{a} la Cloud},
author = {Cristina Alcaraz and Isaac Agudo and David Nu\~{n}ez and Javier Lopez},
url = {/wp-content/papers/1643.pdf},
doi = {10.1109/CloudCom.2011.79},
isbn = {978-0-7695-4622-3},
year = {2011},
date = {2011-00-01},
urldate = {2011-00-01},
booktitle = {IEEE CloudCom 2011},
pages = {527-531},
publisher = {IEEE Computer Society},
address = {Athens, Greece},
organization = {IEEE Computer Society},
abstract = {During the last decade, the Cloud Computing paradigm has emerged as a panacea for many problems in traditional IT infrastructures. Much has been said about the potential of Cloud Computing in the Smart Grid context, but unfortunately it is still relegated to a second layer when it comes to critical systems. Although the advantages of outsourcing those kind of applications to the cloud is clear, data confidentiality and operational privacy stand as mayor drawbacks. In this paper, we try to give some hints on which security mechanisms and more specific, which cryptographic schemes, will help a better integration of Smart Grids and Clouds. We propose the use of Virtual SCADA in the Cloud (VS-Cloud) as a mean to improve reliability and efficiency whilst maintaining the same protection level as in traditional SCADA architectures.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Pablo Najera, Javier Lopez, Rodrigo Roman
Wireless Sensor Networks and the Internet of Things: Do We Need a Complete Integration?
In: 1st International Workshop on the Security of the Internet of Things (SecIoT’10), pp. xxxx, IEEE IEEE, Tokyo (Japan), 2010.
@inproceedings{calcaraz10,
title = {Wireless Sensor Networks and the Internet of Things: Do We Need a Complete Integration?},
author = {Cristina Alcaraz and Pablo Najera and Javier Lopez and Rodrigo Roman},
url = {/wp-content/papers/calcaraz10.pdf},
year = {2010},
date = {2010-12-01},
urldate = {2010-12-01},
booktitle = {1st International Workshop on the Security of the Internet of Things (SecIoT’10)},
pages = {xxxx},
publisher = {IEEE},
address = {Tokyo (Japan)},
organization = {IEEE},
abstract = {Wireless sensor networks (WSN) behave as a digital skin, providing a virtual layer where the information about the physical world can be accessed by any computational system. As a result, they are an invaluable resource for realizing the vision of the Internet of Things (IoT). However, it is necessary to consider whether the devices of a WSN should be completely integrated into the Internet or not. In this paper, we tackle this question from the perspective of security. While we will mention the different security challenges that may arise in such integration process, we will focus on the issues that take place at the network level.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Rodrigo Roman, Pablo Najera, Javier Lopez
Acceso seguro a redes de sensores en SCADA a través de Internet
In: XI Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2010), pp. 337-342, Tarragona (Spain), 2010, ISBN: 978-84-693-3304-4.
@inproceedings{Alcaraz2010,
title = {Acceso seguro a redes de sensores en SCADA a trav\'{e}s de Internet},
author = {Cristina Alcaraz and Rodrigo Roman and Pablo Najera and Javier Lopez},
url = {/wp-content/papers/Alcaraz2010.pdf
http://crises-deim.urv.cat/recsi2010/},
isbn = {978-84-693-3304-4},
year = {2010},
date = {2010-09-01},
urldate = {2010-09-01},
booktitle = {XI Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2010)},
pages = {337-342},
address = {Tarragona (Spain)},
abstract = {Las Infraestructuras Cr\'{i}ticas (ICs) son monitorizadas por sistemas altamente complejos, conocidos como sistemas SCADA (Sistemas de Control y Adquisici\'{o}n de Datos), cuyo principal soporte se encuentra en las subestaciones, las cuales miden de primera instancia el estado real de tales ICs. Para mejorar este control, la industria est\'{a} actualmente demandando la integraci\'{o}n en el modelo tradicional de dos avances tecnol\'{o}gicos: Internet y las redes de sensores inal\'{a}mbricas. Sin embargo, su incorporaci\'{o}n requiere analizar los requisitos de seguridad que surgen en dicho contexto, as\'{i} como diversos aspectos correlacionados (ej. mantenimiento, rendimiento, seguridad y optimizaci\'{o}n) y, en base a estos, la estrategia de integraci\'{o}n m\'{a}s adecuada para satisfacer dichos requisitos. Este art\'{i}culo proporciona dicho an\'{a}lisis en profundidad con el fin de ofrecer un modelo de integraci\'{o}n seguro adecuado para entornos cr\'{i}ticos.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Isaac Agudo, Jose A. Onieva, Daniel Merida
Distribución segura de componentes software basada en OpenID
In: XI Reunión Española sobre Criptología y Seguridad de la Información (RECSI 2010), Tarragona, Spain, 2010, ISBN: 978-84-693-3304-4.
@inproceedings{Agudo2010,
title = {Distribuci\'{o}n segura de componentes software basada en OpenID},
author = {Isaac Agudo and Jose A. Onieva and Daniel Merida},
url = {/wp-content/papers/Agudo2010.pdf},
isbn = {978-84-693-3304-4},
year = {2010},
date = {2010-09-01},
urldate = {2010-09-01},
booktitle = {XI Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI 2010)},
address = {Tarragona, Spain},
abstract = {En la actualidad, cada vez son m\'{a}s frecuentes los ataques software mediante la utilizaci\'{o}n de malware o sustituci\'{o}n de programas (o componentes) en los repositorios a los cuales los usuarios finales (o m\'{a}quinas) acceden. Esta situaci\'{o}n se ve de alguna manera acentuada con el dinamismo existente en la programaci\'{o}n y ejecuci\'{o}n de estos componentes, en la que distintos desarrolladores pueden participar para desplegar un determinado servicio o parte de \'{e}l. Por ello, en este art\'{i}culo se presenta una soluci\'{o}n para la distribuci\'{o}n de c\'{o}digo de forma segura usando OpenID y firmas con certificados de clave p\'{u}blica de corta duraci\'{o}n. De esta forma, se consigue un compromiso de seguridad que permite distribuir c\'{o}digo firmado sin la necesidad de que los desarrolladores dispongan a priori de un certificado espec\'{i}fico. Presentamos adem\'{a}s algunos detalles acerca de la implementaci\'{o}n realizada para hacer realidad este dise\~{n}o.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Angel Balastegui, Javier Lopez
Early Warning System for Cascading Effect Control in Energy Control Systems
In: 5th International conference on Critical Information Infrastructures Security (CRITIS’10), pp. 55-67, Springer Springer, Athens, Greece, 2010, ISSN: 0302-9743.
@inproceedings{Alcaraz2010b,
title = {Early Warning System for Cascading Effect Control in Energy Control Systems},
author = {Cristina Alcaraz and Angel Balastegui and Javier Lopez},
url = {/wp-content/papers/Alcaraz2010b.pdf
http://critis.net/2010/},
issn = {0302-9743},
year = {2010},
date = {2010-09-01},
urldate = {2010-09-01},
booktitle = {5th International conference on Critical Information Infrastructures Security (CRITIS’10)},
volume = {6712},
pages = {55-67},
publisher = {Springer},
address = {Athens, Greece},
organization = {Springer},
series = {LNCS},
abstract = {A way of controlling a cascading effect caused by a failure or a threat in a critical system is using intelligent mechanisms capable of predicting anomalous behaviours and also capable of reacting against them in advance. These mechanisms are known as Early Warning Systems (EWS) and this will be precisely the main topic of this paper. Specially, we present an EWS design based on a Wireless Sensor Network (using the ISA100.11a standard) that constantly supervise the application context. This EWS is also based on forensic techniques to provide dynamic learning capacities. As a result, this new approach will aid to provide a reliable control of incidences by offering a dynamic alarm management, identification of the most suitable field operator to attend an alarm, reporting of causes and responsible operators, and learning from new anomalous situations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Isaac Agudo, Jose L. Gonzalez
Implementación de un esquema de localización privada y segura para interiores
In: Yannis Dimitriadis, María Jesús Verdú Pérez (Ed.): IX Jornadas de Ingeniería Telemática (JITEL’10), pp. 237 – 244, Valladolid (Spain), 2010, ISBN: 978-84-693-5398-1.
@inproceedings{Rios2010a,
title = {Implementaci\'{o}n de un esquema de localizaci\'{o}n privada y segura para interiores},
author = {Ruben Rios and Isaac Agudo and Jose L. Gonzalez},
editor = {Yannis Dimitriadis and Mar\'{i}a Jes\'{u}s Verd\'{u} P\'{e}rez},
url = {/wp-content/papers/Rios2010a.pdf},
isbn = {978-84-693-5398-1},
year = {2010},
date = {2010-09-01},
urldate = {2010-09-01},
booktitle = {IX Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’10)},
pages = {237 - 244},
address = {Valladolid (Spain)},
abstract = {Las aplicaciones basadas en localizaci\'{o}n proporcionan a los usuarios servicios personalizados dependiendo de su ubicaci\'{o}n. Las estimaciones prev\'{e}n que estos servicios se extender\'{a}n enormemente en los pr\'{o}ximos a\~{n}os reportando grandes beneficios tanto a la industria como a los usuarios finales. Sin embargo, para que estos avances sean posibles se hace necesario analizar en profundidad las distintas implicaciones de seguridad y privacidad que la utilizaci\'{o}n de tales servicios pueden traer consigo a los usuarios. En este trabajo proponemos un sistema de localizaci\'{o}n que da soporte a la provisi\'{o}n de servicios basados en localizaci\'{o}n para entornos indoor y que se fundamenta en la tecnolog\'{i}a de redes de sensores inal\'{a}mbricos. En este esquema hemos tenido en cuenta diversos aspectos de seguridad y privacidad, prestando especial atenci\'{o}n a la limitaci\'{o}n extrema de recursos caracter\'{i}stica de las redes de sensores. Finalmente hemos desarrollado una prueba de concepto para comprobar la viabilidad de nuestro esquema dentro del \'{a}mbito del proyecto OSAmI.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ruben Rios, Javier Lopez
Source Location Privacy Considerations in Wireless Sensor Networks
In: Lidia Fuentes, Nadia Gámez, José Bravo (Ed.): 4th International Symposium of Ubiquitous Computing and Ambient Intelligence (UCAmI’10), pp. 29 – 38, IBERGARCETA PUBLICACIONES, S.L. IBERGARCETA PUBLICACIONES, S.L., Valencia (Spain), 2010, ISBN: 978-84-92812-61-5.
@inproceedings{Rios2010,
title = {Source Location Privacy Considerations in Wireless Sensor Networks},
author = {Ruben Rios and Javier Lopez},
editor = {Lidia Fuentes and Nadia G\'{a}mez and Jos\'{e} Bravo},
url = {/wp-content/papers/Rios2010.pdf},
isbn = {978-84-92812-61-5},
year = {2010},
date = {2010-09-01},
urldate = {2010-09-01},
booktitle = {4th International Symposium of Ubiquitous Computing and Ambient Intelligence (UCAmI’10)},
pages = {29 - 38},
publisher = {IBERGARCETA PUBLICACIONES, S.L.},
address = {Valencia (Spain)},
organization = {IBERGARCETA PUBLICACIONES, S.L.},
abstract = {Wireless Sensor Networks are considered to be one of the cornerstones of Ambient Intelligence since they can be used in countless applications, where sensors are unobtrusively embedded into the environment to perform operations like monitoring, tracking and reporting. In such scenarios, privacy issues must be carefully considered since the mere observation of the network operation might reveal great amounts of private information to unauthorised parties. One of the problems that is gaining more attention in the realm of privacy, is the location privacy problem, which aims to prevent an attacker from obtaining the location of specific nodes of interest to him. In this paper we provide a general overview of the proposed solutions to counter this threat. Finally, we will also discuss some open challenges and future directions of research for a convenient management of privacy issues in smart environments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
A Study of Security Approaches for the Development of Mobile Grid Systems
In: 5th International Conference on Software and Data Technologies (ICSOFT’10), pp. 133-138, Springer Springer, Athens, Greece, 2010, ISBN: 978-989-8425-22-5.
@inproceedings{rosado2010c,
title = {A Study of Security Approaches for the Development of Mobile Grid Systems},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
isbn = {978-989-8425-22-5},
year = {2010},
date = {2010-07-01},
urldate = {2010-07-01},
booktitle = {5th International Conference on Software and Data Technologies (ICSOFT’10)},
volume = {1},
pages = {133-138},
publisher = {Springer},
address = {Athens, Greece},
organization = {Springer},
abstract = {Mobile Grid systems allow us to build highly complex information systems with various and remarkable features (interoperability between multiple security domains, cross-domain authentication and authorization, dynamic, heterogeneous and limited mobile devices, etc), which demand secure development methodologies to build quality software, offering methods, techniques and tools that facilitate the work of the entire team involved in software development. These methodologies should be supported by Grid security architectures that define the main security aspects to be considered, and by solutions to the problem of how to integrate mobile devices within Grid systems. Some approaches regarding secure development methodologies of Grid security architectures and of the integration of mobile devices in the Grid have been found in literature, and these are analyzed and studied in this paper, offering a comparison framework of all the approaches related to security in Mobile Grid environments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jose A. Montenegro, Javier Lopez, Rene Peralta
Computacion Segura Multiparte Aplicada a Subastas Electrónicas
In: IX Jornadas de Ingeniería Telemenatica (JITEL 2010), 2010.
@inproceedings{JoseA.Montenegro2010,
title = {Computacion Segura Multiparte Aplicada a Subastas Electr\'{o}nicas},
author = {Jose A. Montenegro and Javier Lopez and Rene Peralta},
url = {/wp-content/papers/JoseA.Montenegro2010.pdf},
year = {2010},
date = {2010-00-01},
urldate = {2010-00-01},
booktitle = {IX Jornadas de Ingenier\'{i}a Telemenatica (JITEL 2010)},
abstract = {La confidencialidad ha pasado de ser un requisito de seguridad a ser considerado como requisito funcional y de obligado cumplimiento e inclusi\'{o}n en todos los sistemas de comunicaciones. Un inconveniente que presenta las t\'{e}cnicas criptogr\'{a}ficas, utilizadas para obtener la confidencialidad de la informaci\'{o}n, surge cuando varias entidades se ven forzadas a compartir informaci\'{o}n secreta para realizar tareas puntuales de colaboraci\'{o}n, ya que las primitivas tradicionales utilizadas para conseguir la confidencialidad resultan poco flexibles. La situaci\'{o}n ideal permitir\'{i}a hacer posible dicha colaboraci\'{o}n sin que ninguna de las partes revele la informaci\'{o}n aportada. En este escenario entra en juego la tecnolog\'{i}a de Computaci\'{o}n Segura Multiparte (CSM) que posibilita realizar operaciones con la informaci\'{o}n compartida sin tener que hacerla p\'{u}blica. Este trabajo muestra una soluci\'{o}n CSM aplicada a una subasta electr\'{o}nica que permite la realizaci\'{o}n de la subasta sin que las apuestas sean reveladas a ning\'{u}n participante, incluyendo el subastador, por lo que no necesita el estableciendo de ninguna autoridad confiable. Aunque la literatura ofrece una amplia variedad de propuestas te\'{o}ricas de CSM desde su creaci\'{o}n en la d\'{e}cada de los ochenta, no es com\'{u}n su aplicacion pr\'{a}ctica en situaciones reales.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Javier Lopez, Cristina Alcaraz
Do Wireless Sensor Networks Need to be Completely Integrated into the Internet?
In: 3rd CompanionAble Workshop – Future Internet of People, Things and Services (IoPTS) eco-Systems, pp. xxxx, xxxx xxxx, Brussels (Belgium), 2009.
@inproceedings{roman2009,
title = {Do Wireless Sensor Networks Need to be Completely Integrated into the Internet?},
author = {Rodrigo Roman and Javier Lopez and Cristina Alcaraz},
url = {/wp-content/papers/roman2009.pdf},
year = {2009},
date = {2009-12-01},
urldate = {2009-12-01},
booktitle = {3rd CompanionAble Workshop - Future Internet of People, Things and Services (IoPTS) eco-Systems},
pages = {xxxx},
publisher = {xxxx},
address = {Brussels (Belgium)},
organization = {xxxx},
abstract = {Wireless sensor networks are considered as an integral part of the Internet of Things paradigm. Not only they provide a virtual presence to elements of the real world, but also allow any computationalsystem to know about the physical state of those elements thanks to the use of embedded sensors. In order to belong to the Internet of Things, the elements of a sensor network can implement Internet protocols and services such as the TCP/IP stack and web services. Still, a question that must be raised at this point of time is whether all sensor network applications should be completely integrated into the Internet or not. The purpose of this paper is to analyze this question, reviewing the challenges and security requirements of Internet-enabled sensor networks.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Isaac Agudo, Carmen Fernandez-Gago, Rodrigo Roman, Gerardo Fernandez, Javier Lopez
Adaptive Dispatching of Incidences Based on Reputation for SCADA Systems
In: 6th International Conference on Trust, Privacy and Security in Digital Business (TrustBus’09), pp. 86-94, Springer-Verlag Springer-Verlag, Linz, Austria, 2009, ISBN: 978-3-642-03747-4.
@inproceedings{Alcaraz2009,
title = {Adaptive Dispatching of Incidences Based on Reputation for SCADA Systems},
author = {Cristina Alcaraz and Isaac Agudo and Carmen Fernandez-Gago and Rodrigo Roman and Gerardo Fernandez and Javier Lopez},
url = {/wp-content/papers/Alcaraz2009.pdf},
doi = {10.1007/978-3-642-03748-1_9},
isbn = {978-3-642-03747-4},
year = {2009},
date = {2009-09-01},
urldate = {2009-09-01},
booktitle = {6th International Conference on Trust, Privacy and Security in Digital Business (TrustBus’09)},
pages = {86-94},
publisher = {Springer-Verlag},
address = {Linz, Austria},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {SCADA systems represent a challenging scenario where the management of critical alarms is crucial. Their response to these alarms should be efficient and fast in order to mitigate or contain undesired effects. This work presents a mechanism, the Adaptive Assignment Manager (AAM) that will aid to react to incidences in a more efficient way by dynamically assigning alarms to the most suitable human operator. The mechanism uses various inputs for identifying the operators such as their availability, workload and reputation. In fact, we also define a reputation component that stores the reputation of the human operators and uses feedback from past experiences.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Extensión UML para Casos de Uso Reutilizables en entornos Grid Móviles Seguros
In: XIV Jornadas de Ingeniería del Software y Bases de Datos (JISBD 2009), pp. 331-342, Antonio Vallecillo and Goiuria Sagardui (Eds.) Antonio Vallecillo and Goiuria Sagardui (Eds.), San Sebastián, España, 2009, ISBN: 978-84-692-4211-7.
@inproceedings{rosado2009e,
title = {Extensi\'{o}n UML para Casos de Uso Reutilizables en entornos Grid M\'{o}viles Seguros},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
url = {/wp-content/papers/rosado2009e.pdf},
isbn = {978-84-692-4211-7},
year = {2009},
date = {2009-09-01},
urldate = {2009-09-01},
booktitle = {XIV Jornadas de Ingenier\'{i}a del Software y Bases de Datos (JISBD 2009)},
pages = {331-342},
publisher = {Antonio Vallecillo and Goiuria Sagardui (Eds.)},
address = {San Sebasti\'{a}n, Espa\~{n}a},
organization = {Antonio Vallecillo and Goiuria Sagardui (Eds.)},
abstract = {Los sistemas Grid nos permiten construir sistemas complejos con caracter\'{i}sticas diferenciadoras (interoperabilidad entre m\'{u}ltiples dominios de seguridad, autenticaci\'{o}n y autorizaci\'{o}n a trav\'{e}s de dominios, sistema din\'{a}mico y heterog\'{e}neo, etc.). Con el desarrollo de la tecnolog\'{i}a wireless y los dispositivos m\'{o}viles, el Grid llega a ser el candidato perfecto para que los usuarios m\'{o}viles puedan realizar trabajos complejos, a la vez que a\~{n}aden nueva capacidad computacional al Grid. Estamos construyendo un proceso completo de desarrollo para sistemas Grid m\'{o}viles seguros, y una de las actividades es el an\'{a}lisis de requisitos, que est\'{a} basado en casos de uso reutilizables. En este art\'{i}culo, presentaremos una extensi\'{o}n UML para casos de uso de seguridad y Grid, los cuales capturan el comportamiento de este tipo de sistemas. Esta extensi\'{o}n UML est\'{a} siendo aplicado a un caso real para construir diagramas de casos de uso de la aplicaci\'{o}n, incorporando los aspectos de seguridad necesarios.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Rodrigo Roman, Cristina Alcaraz
Analysis of Security Threats, Requirements, Technologies and Standards in Wireless Sensor Networks
In: Foundations of Security Analysis and Design 2009, pp. 289-338, Springer Berlin/Heidelberg Springer Berlin/Heidelberg, Bertinoro (Italy), 2009, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Lopez2009,
title = {Analysis of Security Threats, Requirements, Technologies and Standards in Wireless Sensor Networks},
author = {Javier Lopez and Rodrigo Roman and Cristina Alcaraz},
url = {/wp-content/papers/Lopez2009.pdf
http://www.springerlink.com/content/u8h4882831k474n6/},
doi = {10.1007/978-3-642-03829-7_10},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2009},
date = {2009-08-01},
urldate = {2009-08-01},
booktitle = {Foundations of Security Analysis and Design 2009},
volume = {5705},
pages = {289-338},
publisher = {Springer Berlin/Heidelberg},
address = {Bertinoro (Italy)},
organization = {Springer Berlin/Heidelberg},
series = {LNCS},
abstract = {As sensor networks are more and more being implemented in real world settings, it is necessary to analyze how the different requirements of these real-world applications can influence the security mechanisms. This paper offers both an overview and an analysis of the relationship between the different security threats, requirements, applications, and security technologies. Besides, it also overviews some of the existing sensor network standards, analyzing their security mechanisms.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rafael J. Caro, David Garrido, Pierre Plaza, Rodrigo Roman, Nuria Sanz, Jose L. Serrano
SMEPP: A Secure Middleware for Embedded P2P
In: ICT Mobile and Wireless Communications Summit (ICT-MobileSummit’09), Santander (Spain), 2009, ISBN: 978-1-905824-12-0.
@inproceedings{Benito2009,
title = {SMEPP: A Secure Middleware for Embedded P2P},
author = {Rafael J. Caro and David Garrido and Pierre Plaza and Rodrigo Roman and Nuria Sanz and Jose L. Serrano},
url = {/wp-content/papers/Benito2009.pdf},
isbn = {978-1-905824-12-0},
year = {2009},
date = {2009-06-01},
urldate = {2009-06-01},
booktitle = {ICT Mobile and Wireless Communications Summit (ICT-MobileSummit’09)},
address = {Santander (Spain)},
abstract = {The increasing presence of embedded devices with internet access capabilities constitutes a new challenge in software development. These devices are now cooperating in a distributed manner towards what has been called as "Internet of Things". In this new scenario the client-server model is sometimes not adequate and dynamic ad-hoc networks are more common than before. However, security poses as a hard issue as these systems are extremely vulnerable. In this paper, we introduce SMEPP project, which aims at developing a middleware designed for P2P systems with a special focus on embedded devices and security. SMEPP is designed to be deployed in a wide range of devices. It tries to ease the development of applications hiding platforms details and other aspects such as scalability, adaptability and interoperability. A full implementation of this middleware is already available that incorporates security features specially designed for low-resource devices. Moreover, we describe two business applications being developed using this middleware in the context of "Digital Home" and "Environmental Monitoring in Industrial Environments".},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Applying a UML Extension to build Use Cases diagrams in a secure mobile Grid application
In: 5th International Workshop on Foundations and Practices of UML, pp. 126-136, Springer Berlin Heidelberg Springer Berlin Heidelberg, Gramado, Brasil, 2009, ISBN: 978-3-642-04946-0.
@inproceedings{rosado2009f,
title = {Applying a UML Extension to build Use Cases diagrams in a secure mobile Grid application},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
url = {/wp-content/papers/rosado2009f.pdf},
isbn = {978-3-642-04946-0},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {5th International Workshop on Foundations and Practices of UML},
volume = {5833},
pages = {126-136},
publisher = {Springer Berlin Heidelberg},
address = {Gramado, Brasil},
organization = {Springer Berlin Heidelberg},
series = {LNCS},
abstract = {Systems based on Grid computing have not traditionally beendeveloped through suitable methodologies and have not taken into accountsecurity requirements throughout their development, offering technical securitysolutions only during the implementation stages. We are creating a developmentmethodology for the construction of information systems based on GridComputing, which is highly dependent on mobile devices, in which securityplays a highly important role. One of the activities in this methodology is therequirements analysis which is use-case driven. In this paper, we build use casediagrams for a real mobile Grid application by using a UML-extension, calledGridUCSec-Profile, through which it is possible to represent specific mobileGrid features and security aspects for use case diagrams, thus obtainingdiagrams for secure mobile Grid environments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Hacia una Arquitectura de Servicios de Seguridad para entornos Grid móviles
In: V Congreso Iberoamericano de Seguridad Informática (CIBSI’09), pp. 409-423, Universidad de la República, Uruguay Universidad de la República, Uruguay, Montevideo, Uruguay, 2009, ISBN: 978-9974-0-0593-8.
@inproceedings{rosado2009d,
title = {Hacia una Arquitectura de Servicios de Seguridad para entornos Grid m\'{o}viles},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
url = {/wp-content/papers/rosado2009d.pdf},
isbn = {978-9974-0-0593-8},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {V Congreso Iberoamericano de Seguridad Inform\'{a}tica (CIBSI’09)},
pages = {409-423},
publisher = {Universidad de la Rep\'{u}blica, Uruguay},
address = {Montevideo, Uruguay},
organization = {Universidad de la Rep\'{u}blica, Uruguay},
abstract = {Grid m\'{o}vil incluye las caracter\'{i}sticas de los sistemas Grid junto conlas peculiaridades de la computaci\'{o}n m\'{o}vil, a\~{n}adiendo la propiedad de soportarusuarios y recursos m\'{o}viles de forma homog\'{e}nea, transparente, segura yeficiente. La seguridad de estos sistemas, debido a su naturaleza abierta ydistribuida, es un tema de gran inter\'{e}s. Una arquitectura de seguridad basada enSOA proporciona una arquitectura distribuida dise\~{n}ada para interoperabilidadde servicios, f\'{a}cil integraci\'{o}n, y acceso seguro, simple y extensible. Por tanto,una arquitectura orientada a servicios de seguridad es construida para entornosGrid m\'{o}viles, ofreciendo servicios de seguridad a usuarios m\'{o}viles quienesusan servicios Grid y recursos para ejecutar sus trabajos y tareas. Estaarquitectura es integrada con otras arquitecturas existentes proporcionandomayor seguridad y permitiendo que los usuarios m\'{o}viles puedan acceder aservicios Grid existentes ofreciendo nuevos y necesarios servicios de seguridadpara Grid m\'{o}viles. Hemos definido un conjunto de servicios de seguridad, quejunto a protocolos, pol\'{i}ticas y est\'{a}ndares de seguridad forman una arquitecturade seguridad orientada a servicios para entornos Grid m\'{o}viles. Esta arquitecturaes abierta, escalable, din\'{a}mica, interoperable y flexible.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Carmen Fernandez-Gago, Javier Lopez
A Multidimensional Reputation Scheme for Identity Federations
In: Sixth European Workshop on Public Key Services, Applications and Infrastructures (EuroPKI’09), pp. 225-238, Springer Springer, 2009, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Agudo2009a,
title = {A Multidimensional Reputation Scheme for Identity Federations},
author = {Isaac Agudo and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Agudo2009a.pdf},
doi = {10.1007/978-3-642-16441-5_15},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {Sixth European Workshop on Public Key Services, Applications and Infrastructures (EuroPKI’09)},
volume = {6391},
pages = {225-238},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Deciding who to trust in the internet of services paradigm is an important and open question. How to do it in an optimal way is not always easy to determine. Trust is usually referred to a particular context whereas a single user may interact in more than one given context. We are interested in investigating how a Federated Reputation System can help exporting trust perceptions from one context to another. We propose a model for deriving trust in online services. In this context, trust is defined as the level of confidence that the service provider holds on the subject interacting with it to behave in a proper way while using the service. Thus, we derive trust by using the reputation values that those users have gained for interacting with these services.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Reusable Security Use Cases for Mobile Grid environments
In: Workshop on Software Engineering for Secure Systems, pp. 1-8, IEEE IEEE, Vancouver, Canada, 2009, ISBN: 978-1-4244-3725-2.
@inproceedings{rosado2009b,
title = {Reusable Security Use Cases for Mobile Grid environments},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
url = {/wp-content/papers/rosado2009b.pdf},
isbn = {978-1-4244-3725-2},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {Workshop on Software Engineering for Secure Systems},
pages = {1-8},
publisher = {IEEE},
address = {Vancouver, Canada},
organization = {IEEE},
abstract = {Due to the growing complexity of software development, developing software through systematic processes is becoming more and more important.Likewise, it is important that the development process used integrates security aspects from the first stages at the same level as other functional and non-functional requirements. In the last years, GRID technology has shown to be the most important one and it allows us to build very complex information systems with different and remarkable features (interoperability between multiple security domains, cross-domain authentication and authorization, dynamic,heterogeneous and limited mobile devices, etc). Traditionally, systems based on GRID Computing have not been developed through adequate methodologies and have not taken into account security requirements throughout their development, only offering security technical solutions at the implementation stages. This paper shows part of a development methodology that we are elaborating for the construction of information systems based on Grid Computing highly dependent on mobile devices where security plays a very important role. Specifically, in this paper, we will present the analysis phase, managed by reusable use cases through which we can define the requirements and needs of these systems obtaining an analysis model that can be used as input to the following phase of theme thodology, the design phase of mobile Grid systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Reutilización de Casos de Uso en el Desarrollo de Sistemas Grid seguros
In: XII Conferencia Iberoamericana de Ingeniería de Requisitos y Ambientes de Software (IDEAS’09), pp. 388-393, University of Colombia University of Colombia, Medellín, Colombia, 2009, ISBN: 978-958-44-5028-9.
@inproceedings{rosado2009a,
title = {Reutilizaci\'{o}n de Casos de Uso en el Desarrollo de Sistemas Grid seguros},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
isbn = {978-958-44-5028-9},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {XII Conferencia Iberoamericana de Ingenier\'{i}a de Requisitos y Ambientes de Software (IDEAS’09)},
pages = {388-393},
publisher = {University of Colombia},
address = {Medell\'{i}n, Colombia},
organization = {University of Colombia},
abstract = {El desarrollo software debe estar basado en un proceso sistem\'{a}tico y estructurado donde se definan los m\'{e}todos y t\'{e}cnicas a utilizar en todo su ciclo de vida, ayudando as\'{i} a obtener un producto de calidad. Es igualmente importante que el proceso sistem\'{a}tico considere aspectos de seguridad desde las primeras etapas, integr\'{a}ndola como un elemento m\'{a}s en el ciclo de desarrollo. En este art\'{i}culo mostramos la metodolog\'{i}a de desarrollo sistem\'{a}tico que sirve de gu\'{i}a para el desarrollo de cualquier sistema Grid con dispositivos m\'{o}viles, considerando la seguridad durante todas las fases de desarrollo, lo que nos permitir\'{a} obtener como resultado sistemas Grid seguros, robustos y escalables. Este art\'{i}culo presenta la fase de an\'{a}lisis, dirigida por casos de uso reutilizables, mediante los cuales se definen los requisitos y necesidades de estos sistemas, y es aplicada a un caso de estudio real de un Grid para el acceso de contenidos multimedia en un contexto period\'{i}stico.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jose L. Vivas, Isaac Agudo, Javier Lopez
Security Assurance During the Software Development Process
In: International Conference on Computer Systems and Technologies (CompSysTech09), pp. 11.7.1-11.7.6, ACM ACM, Ruse (Bulgary), 2009, ISBN: 978-1-60558-986-2.
@inproceedings{vivas09,
title = {Security Assurance During the Software Development Process},
author = {Jose L. Vivas and Isaac Agudo and Javier Lopez},
url = {/wp-content/papers/vivas09.pdf},
doi = {10.1145/1731740.1731763},
isbn = {978-1-60558-986-2},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {International Conference on Computer Systems and Technologies (CompSysTech09)},
pages = {11.7.1-11.7.6},
publisher = {ACM},
address = {Ruse (Bulgary)},
organization = {ACM},
abstract = {Assurance has been a major topic for critical systems. Assurance is usually associated with safety conditions but has also an important role for checking security requirements. Security is best assured if it is addressed holistically, systematically, and from the very beginning in the software’s development process. We propose to integrate assurance and system development by letting the different stages of the system development life-cycle be mapped to the structure of the assurance case.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

David Galindo, Rodrigo Roman, Javier Lopez
A Killer Application for Pairings: Authenticated Key Establishment in Underwater Wireless Sensor Networks
In: Proceedings of the 7th International Conference on Cryptology and Network Security (CANS’08), pp. 120-132, Springer Springer, Hong Kong (China), 2008, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Galindo2008aa,
title = {A Killer Application for Pairings: Authenticated Key Establishment in Underwater Wireless Sensor Networks},
author = {David Galindo and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Galindo2008aa.pdf
http://www.springerlink.com/content/g26h0115ngt12331/},
doi = {10.1007/978-3-540-89641-8_9},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2008},
date = {2008-12-01},
urldate = {2008-12-01},
booktitle = {Proceedings of the 7th International Conference on Cryptology and Network Security (CANS’08)},
volume = {5339},
pages = {120-132},
publisher = {Springer},
address = {Hong Kong (China)},
organization = {Springer},
series = {LNCS},
abstract = {Wireless sensors are low power devices which are highly constrained in terms of computational capabilities, memory, and communication bandwidth. While battery life is their main limitation, they require considerable energy to communicate data. The latter is specially dramatic in underwater wireless sensor networks (UWSN), where the acoustic transmission mechanisms are less reliable and more energy-demanding. Saving in communication is thus the primary concern in underwater wireless sensors. With this constraint in mind, we argue that non-interactive identity-based key agreement built on pairings provides the best solution for key distribution in large UWSN when compared to the state of the art. At first glance this claim is surprising, since pairing computation is very demanding. Still, pairing-based non-interactive key establishment requires minimal communication and at the same time enjoys excellent properties when used for key distribution.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rafael J. Caro, David Garrido, Pierre Plaza, Rodrigo Roman, Nuria Sanz, Jose L. Serrano
Middleware Seguro EP2P: un Desafío para las Redes Sociales
In: XVIII Jornadas Telecom I+D, Bilbao (Spain), 2008.
@inproceedings{Benito2008,
title = {Middleware Seguro EP2P: un Desaf\'{i}o para las Redes Sociales},
author = {Rafael J. Caro and David Garrido and Pierre Plaza and Rodrigo Roman and Nuria Sanz and Jose L. Serrano},
url = {/wp-content/papers/Benito2008.pdf},
year = {2008},
date = {2008-10-01},
urldate = {2008-10-01},
booktitle = {XVIII Jornadas Telecom I+D},
address = {Bilbao (Spain)},
abstract = {Los sistemas distribuidos en dispositivos embebidos representan un nuevo reto en el desarrollo de software. Estos sistemas han supuesto una importante revoluci\'{o}n en el paradigma de la computaci\'{o}n distribuida donde se intenta fragmentar un problema grande en m\'{u}ltiples problemas m\'{a}s peque\~{n}os. El nuevo escenario tiende entonces hacia sistemas en los cuales todos los elementos de la red se consideran iguales y los mecanismos de comunicaci\'{o}n est\~{a}n basados en redes ad-hoc que se forman din\'{a}micamente. De esta forma cualquier usuario de la red (en realidad cualquier elemento, hasta el m\'{a}s simple dispositivo) adquiere valor, a mayor colaboraci\'{o}n, mayor \'{e}xito del sistema. Sin embargo, desde el punto de vista de la seguridad, estos sistemas son extremadamente vulnerables. En este art\'{i}culo se presenta SMEPP, un middleware dise\~{n}ado especialmente para sistemas P2P incluyendo aspectos de seguridad. SMEPP est\'{a} dise\~{n}ado para poder ser ejecutado en un amplio rango de dispositivos (desde redes de sensores hasta PC), y trata de facilitar el desarrollo de aplicaciones ocultando los detalles de la plataforma y otros aspectos tales como escalabilidad, adaptabilidad e interoperabilidad. Adem\'{a}s el art\'{i}culo presenta dos aplicaciones de alto nivel que utilizando este middleware pasan a ser m\'{a}s personales, m\'{a}s sociales y m\'{a}s baratas, haciendo que todos los usuarios de la red cobren mayor importancia.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Pablo Najera, Francisco Moyano, Javier Lopez
Secure Integration of RFID Technology in Personal Documentation for Seamless Identity Validation
In: 3rd Symposium of Ubiquitous Computing and Ambient Intelligence 2008, pp. 134-138, Springer Springer, Salamanca (Spain), 2008, ISBN: 978-3-540-85866-9.
@inproceedings{PNajera2009,
title = {Secure Integration of RFID Technology in Personal Documentation for Seamless Identity Validation},
author = {Pablo Najera and Francisco Moyano and Javier Lopez},
url = {/wp-content/papers/PNajera2009.pdf
http://www.springerlink.com/content/bx8t243130k07585/},
doi = {10.1007/978-3-540-85867-6_16},
isbn = {978-3-540-85866-9},
year = {2008},
date = {2008-10-01},
urldate = {2008-10-01},
booktitle = {3rd Symposium of Ubiquitous Computing and Ambient Intelligence 2008},
volume = {51/2009},
pages = {134-138},
publisher = {Springer},
address = {Salamanca (Spain)},
organization = {Springer},
series = {Advances in Soft Computing},
abstract = {Seamless human identification and authentication in the information system is a fundamental step towards the transparent interaction between the user and its context proposed in ambient intelligence. In this context, the IDENTICA project is aimed to the design and implementation of a distributed authentication platform based on biometrics (i.e. voice and facial image) and personal documentation. In this paper, we present our work in this project focused on the secure integration of RFID technology in personal documentation in order to provide seamless identity validation. Our actual work status, first results and future directions are described in detail.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Cristina Alcaraz, Rodrigo Roman, Javier Lopez
Análisis de la Aplicabilidad de las Redes de Sensores para la Protección de Infraestructuras de Información Críticas
In: VI Jornadas de Ingeniería Telemática (JITEL’08), pp. 437, Alcalá de Henares (Spain), 2008, ISBN: 978-84-612-5474-3.
@inproceedings{Alcaraz2008,
title = {An\'{a}lisis de la Aplicabilidad de las Redes de Sensores para la Protecci\'{o}n de Infraestructuras de Informaci\'{o}n Cr\'{i}ticas},
author = {Cristina Alcaraz and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Alcaraz2008.pdf
http://www.telematica.ws/jitel/2008/default.htm},
isbn = {978-84-612-5474-3},
year = {2008},
date = {2008-09-01},
urldate = {2008-09-01},
booktitle = {VI Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’08)},
pages = {437},
address = {Alcal\'{a} de Henares (Spain)},
abstract = {Las infraestructuras cr\'{i}ticas, como el sector energ\'{e}tico, la banca, el transporte, y muchas otras, son un pilar esencial para en bienestar de la sociedad y la econom\'{i}a de un pa\'{i}s. Estas infraestructuras dependen a su vez de ciertas infraestructuras de informaci\'{o}n, las cuales permiten su correcto funcionamiento. La tarea de proteger esas infraestructuras (de informaci\'{o}n) cr\'{i}ticas es compleja y multidimensional, con una gran cantidad de desaf\'{i}os por resolver. Precisamente, las redes de sensores pueden ser de gran ayuda para esta tarea, debido a suscapacidades de control distribuidas y a su habilidad de funcionar en situaciones extremas. Este art\'{i}culo analiza la utilidad de las redes de sensores en este contexto, describiendo tanto sus capacidades como sus posibles roles y mecanismos de integraci\'{o}n para la protecci\'{o}n de infraestructuras (de informaci\'{o}n) cr\'{i}ticas.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ruben Rios, Jose A. Onieva
Clasificación de canales encubiertos. Un nuevo canal: Covert_DHCP
In: Luis Hernández Encinas, Angel Martin Rey (Ed.): X Reunión Española de Criptología y Seguridad de la Información (RECSI’08), pp. 325-336, Salamanca (Spain), 2008, ISBN: 978-84-691-5158-7.
@inproceedings{Rios2008,
title = {Clasificaci\'{o}n de canales encubiertos. Un nuevo canal: Covert_DHCP},
author = {Ruben Rios and Jose A. Onieva},
editor = {Luis Hern\'{a}ndez Encinas and Angel Martin Rey},
url = {/wp-content/papers/Rios2008.pdf},
isbn = {978-84-691-5158-7},
year = {2008},
date = {2008-09-01},
urldate = {2008-09-01},
booktitle = {X Reuni\'{o}n Espa\~{n}ola de Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI’08)},
pages = {325-336},
address = {Salamanca (Spain)},
abstract = {Los canales encubiertos son una forma de comunicaci\'{o}n oculta que puede vulnerar la integridad de los sistemas. Desde sus inicios en sistemas de seguridad multinivel a principios de los a\~{n}os 70 han evolucionado considerablemente, apareciendo soluciones para redes de computadores debido a la especificaci\'{o}n de algunos protocolos. Por este motivo, se hace un estudio sobre las t\'{e}cnicas que se han utilizado para crear los canales, as\'{i} como sobre las distintos obst\'{a}culos que han tratado de mermar su actividad. Asimismo, se presenta una nueva clasificaci\'{o}n que trata de albergar la mayor cantidad de canales encubiertos existentes en la actualidad. Por \'{u}ltimo, se analiza un protocolo ampliamente extendido en la actualidad, DHCP, en busca de posibilidades de albergar informaci\'{o}n encubierta. A partir de este an\'{a}lisis se implementan distintas versiones de un canal encubierto haciendo uso de este protocolo.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David Galindo, Rodrigo Roman, Javier Lopez
An Evaluation of the Energy Cost of Authenticated Key Agreement in Wireless Sensor Networks
In: X Reunión Española sobre Criptología y Seguridad de la Información (RECSI’08), pp. 231-236, Salamanca (Spain), 2008.
@inproceedings{Galindo2008a,
title = {An Evaluation of the Energy Cost of Authenticated Key Agreement in Wireless Sensor Networks},
author = {David Galindo and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Galindo2008a.pdf},
year = {2008},
date = {2008-09-01},
urldate = {2008-09-01},
booktitle = {X Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (RECSI’08)},
pages = {231-236},
address = {Salamanca (Spain)},
abstract = {Wireless sensors are battery-powered devices which are highly constrained in terms of computational capabilities, memory, and communication bandwidth. While battery life is their main limitation, they require considerable energy to communicate data. Due to this, the energy saving of computationally inexpensive security primitives (like those using symmetric key cryptography) can be nullified by the bigger amount of data they require to be sent. In this work we study the energy cost of key agreement protocols between peers in a network using public key cryptography techniques. Our concern is to reduce the amount of data to be exchanged. Our main news is that a computationally very demanding security primitive, such as identity-based authenticated key exchange, can present energy-wise a better performance than traditional public key based key exchange in realistic scenarios such as Underwater Wireless Sensor Networks. Such a result is not to be expected in wired networks.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Javier Lopez
KeyLED – Transmitting Sensitive Data over out-of-band Channels in Wireless Sensor Networks
In: 5th IEEE International Conference on Mobile Ad Hoc and Sensor Systems (MASS’08), pp. 796-801, IEEE IEEE, Atlanta (USA), 2008, ISBN: 978-1-4244-2574-7.
@inproceedings{Roman2008b,
title = {KeyLED - Transmitting Sensitive Data over out-of-band Channels in Wireless Sensor Networks},
author = {Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Roman2008b.pdf},
doi = {10.1109/MAHSS.2008.4660128},
isbn = {978-1-4244-2574-7},
year = {2008},
date = {2008-09-01},
urldate = {2008-09-01},
booktitle = {5th IEEE International Conference on Mobile Ad Hoc and Sensor Systems (MASS’08)},
pages = {796-801},
publisher = {IEEE},
address = {Atlanta (USA)},
organization = {IEEE},
abstract = {An out-of-band (OoB) channel can be defined as an extra channel, different from the main wireless channel, that has additional security properties. They are specially suitable for protecting spontaneous interactions and exchanging sensitive data between previously unknown devices. Due to the vulnerable nature of wireless sensor networks (WSN), these kind of channels might be useful for protecting certain sensor network operations. In this paper we analyze the applicability of out-of-band channels to wireless sensor networks, and specify why an optical channel should be a good candidate for implementing an extra channel in sensor nodes. Also, we analyze how the existing security threats may affect this type of channel. Finally, the suitability and usability of optical channels for sensor networks is demonstrated by means of a prototype.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jose Manuel Marquez, Javier Jimenez, Isaac Agudo
Secure Real-Time Integration of Services in a OSGi Distributed Environment
In: Fourth International Conference on Networked Computing and Advanced Information Management (NCM’08), pp. 631-635, IEEE IEEE, Gyeongju, South Korea, 2008, ISBN: 978-0-7695-3322-3.
@inproceedings{Marquez2008,
title = {Secure Real-Time Integration of Services in a OSGi Distributed Environment},
author = {Jose Manuel Marquez and Javier Jimenez and Isaac Agudo},
doi = {10.1109/NCM.2008.173},
isbn = {978-0-7695-3322-3},
year = {2008},
date = {2008-09-01},
urldate = {2008-09-01},
booktitle = {Fourth International Conference on Networked Computing and Advanced Information Management (NCM’08)},
volume = {1},
pages = {631-635},
publisher = {IEEE},
address = {Gyeongju, South Korea},
organization = {IEEE},
abstract = {This paper presents a service oriented architecture for real-time integration of services, how to distribute them in a local domain and how to define a secure way of accessing resources using users’ and services’ authorization and authentication. This work take advantage of previous European R amp;D projects focused on del.ivering applications and utilities in embedded real-time environments and the convergence of different worlds like Internet and digital TV.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jianying Zhou, Tanmoy Kanti Das, Javier Lopez
An Asynchronous Node Replication Attack in Wireless Sensor Networks
In: 23rd International Information Security Conference (SEC 2008), pp. 125-139, 2008, ISBN: 978-0-387-09699-5.
@inproceedings{1702,
title = {An Asynchronous Node Replication Attack in Wireless Sensor Networks},
author = {Jianying Zhou and Tanmoy Kanti Das and Javier Lopez},
isbn = {978-0-387-09699-5},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {23rd International Information Security Conference (SEC 2008)},
volume = {278},
pages = {125-139},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Carmen Fernandez-Gago, Javier Lopez
Delegating Privileges over Finite Resources: A Quota Based Delegation Approach
In: 5th International Workshop on Formal Aspects in Security and Trust (FAST’08), pp. 302-315, Springer Springer, Malaga (Spain), 2008, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Agudo2008,
title = {Delegating Privileges over Finite Resources: A Quota Based Delegation Approach},
author = {Isaac Agudo and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Agudo2008.pdf},
doi = {10.1007/978-3-642-01465-9},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {5th International Workshop on Formal Aspects in Security and Trust (FAST’08)},
volume = {5491},
pages = {302-315},
publisher = {Springer},
address = {Malaga (Spain)},
organization = {Springer},
series = {LNCS},
abstract = {When delegation in real world scenarios is considered, the delegator (the entity that posses the privileges) usually passes the privileges on to the delegatee (the entity that receives the privileges) in such a way that the former looses these privileges while the delegation is effective. If we think of a physical key that opens a door, the privilege being delegated by the owner of the key is opening the door. Once the owner of the key delegates this privilege to another entity, by handing over the key, he is not able to open the door any longer. This is due to the fact that the key is not copied and handed over but handed over to the delegatee. When delegation takes place in the electronic world, the delegator usually retains also the privileges. Thus, both users have them simultaneously. This situation, which in most cases is not a problem, may be undesirable when dealing with certain kind of resources. In particular, if we think of finite resources, those in which the number of users accessing simultaneously is finite, we can not allow that a user delegating his access privilege is also granted access when the delegation if effective. In this paper we propose an approach where each user is delegated an access quota for a resource. If further delegating of the delegated quota occurs, this is subtracted from his quota. That is, when delegating, part of the quota remains with the delegator and another part goes to the delegatee. This allows a more fairly access to the resource. Moreover, we show that this approach can also be applied to any kind of resources by defining appropriate authorization policies.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
Engineering Process Based On Grid Use Cases For Mobile Grid Systems
In: Third International Conference on Software and Data Technologies (ICSOFT’08), pp. 146-151, Springer Springer, Porto, Portugal, 2008, ISSN: 1865-0929.
@inproceedings{rosado2008a,
title = {Engineering Process Based On Grid Use Cases For Mobile Grid Systems},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
url = {/wp-content/papers/rosado2008a.pdf},
issn = {1865-0929},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {Third International Conference on Software and Data Technologies (ICSOFT’08)},
pages = {146-151},
publisher = {Springer},
address = {Porto, Portugal},
organization = {Springer},
abstract = {The interest to incorporate mobile devices into Grid systems has arisen with two main purposes. The firstone is to enrich users of these devices while the other is that of enriching the own Grid infrastructure.Security of these systems, due to their distributed and open nature, is considered a topic of great interest. Aformal approach to security in the software life cycle is essential to protect corporate resources. However,little attention has been paid to this aspect of software development. Due to its criticality, security should beintegrated as a formal approach into the software life cycle. We are developing a methodology ofdevelopment for secure mobile Grid computing based systems that helps to design and build secure Gridsystems with support for mobile devices directed by use cases and security use cases and focused onservice-oriented security architecture. In this paper, we will present one of the first steps of ourmethodology consisting of analyzing security requirements of mobile grid systems. This analysis will allowus to obtain a set of security requirements that our methodology must cover and implement.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Carmen Fernandez-Gago, Javier Lopez
An Evolutionary Trust and Distrust Model
In: 4th Workshop on Security and Trust Management (STM’08), pp. 3-12, Elsevier Elsevier, Trondheim, Norway, 2008, ISSN: 1571-0661.
@inproceedings{Agudo2008b,
title = {An Evolutionary Trust and Distrust Model},
author = {Isaac Agudo and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Agudo2008b.pdf},
doi = {10.1016/j.entcs.2009.07.034},
issn = {1571-0661},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {4th Workshop on Security and Trust Management (STM’08)},
volume = {224},
pages = {3-12},
publisher = {Elsevier},
address = {Trondheim, Norway},
organization = {Elsevier},
series = {ENTCS},
abstract = {In this paper we propose a trust model, where besides considering trust and distrust, we also consider another parameter that measures the reliability on the stability of trust or distrust. The inclusion of this new parameter will allow us to use trust in a more accurate way. We consider trust is not static but dynamic and trust values can change along time. Thus, we will also take time into account, using it as a parameter of our model. There is very little work done about the inclusion of time as an influence on trust. We will show the applicability of our model in the scenario of the process of reviewing papers for a conference. Sometimes for these kind of processes the Chair of the conference should first find the suitable reviewers. He can make this selection by using our model. Once the reviewers are selected they send out their reviews to the Chair who can also use our model in order to make the final decision about acceptance of papers.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Vicente Benjumea, Seung G. Choi, Javier Lopez, Moti Yung
Fair Traceable Multi-Group Signatures
In: Financial Cryptography and Data Security (FC’08), pp. 265-281, Springer Springer, Cozumel, Mexico, 2008.
@inproceedings{VicenteBenjumea2008ab,
title = {Fair Traceable Multi-Group Signatures},
author = {Vicente Benjumea and Seung G. Choi and Javier Lopez and Moti Yung},
url = {/wp-content/papers/VicenteBenjumea2008ab.pdf},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {Financial Cryptography and Data Security (FC’08)},
volume = {5143},
pages = {265-281},
publisher = {Springer},
address = {Cozumel, Mexico},
organization = {Springer},
series = {LNCS},
abstract = {This paper presents fair traceable multi-group signatures (FTMGS) which have enhanced capabilities compared to group and traceable signatures that are important in real world scenarios combining accountability and anonymity. The main goal of the primitive is to allow multi groups that are managed separately (managers are not even aware of the other ones), yet allowing users (in the spirit of the Identity 2.0 initiative) to manage what they reveal about their identity with respect to these groups by themselves. This new primitive incorporates the following additional features: (a) While considering multiple groups it discourages users from sharing their private membership keys through two orthogonal and complementary approaches. In fact, it merges functionality similar to credential systems with anonymous type of signing with revocation. (b) The group manager now mainly manages joining procedures, and new entities (called fairness authorities and consisting of various representatives, possibly) are involved in opening and revealing procedures. In many systems scenario assuring fairness in anonymity revocation is required.We specify the notion and implement it with a security proof of its properties (in the ROM).},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Carmen Fernandez-Gago, Javier Lopez
A Model for Trust Metrics Analysis
In: 5th International Conference on Trust, Privacy and Security in Digital Business (TrustBus’08), pp. 28-37, Springer Springer, 2008, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Agudo2008a,
title = {A Model for Trust Metrics Analysis},
author = {Isaac Agudo and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Agudo2008a.pdf},
doi = {10.1007/978-3-540-85735-8_4},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {5th International Conference on Trust, Privacy and Security in Digital Business (TrustBus’08)},
volume = {5185},
pages = {28-37},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Trust is an important factor in any kind of network essential, for example, in the decision-making process. As important as the definition of trust is the way to compute it. In this paper we propose a model for defining trust based on graph theory and show examples of some simple operators and functions that will allow us to compute trust.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
PSecGCM: Process for the development of Secure Grid Computing based Systems with Mobile devices
In: International Conference on Availability, Reliability and Security (ARES’08), pp. 136-143, IEEE Computer Society IEEE Computer Society, A Grid computing system is defined as a platform that supports distributed system applications which require fast access to a large quantity of distributed resources in a coordinated manner. With the development of wireless technology and mobile devices,, 2008, ISSN: 978-0-7695-3102-1.
@inproceedings{rosado2008,
title = {PSecGCM: Process for the development of Secure Grid Computing based Systems with Mobile devices},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
url = {/wp-content/papers/rosado2008.pdf},
issn = {978-0-7695-3102-1},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {International Conference on Availability, Reliability and Security (ARES’08)},
pages = {136-143},
publisher = {IEEE Computer Society},
address = {A Grid computing system is defined as a platform that supports distributed system applications which require fast access to a large quantity of distributed resources in a coordinated manner. With the development of wireless technology and mobile devices,},
organization = {IEEE Computer Society},
abstract = {A Grid computing system is defined as a platformthat supports distributed system applications which require fastaccess to a large quantity of distributed resources in acoordinated manner. With the development of wirelesstechnology and mobile devices, the Grid becomes the perfectcandidate so that mobile users can make complex works that addnew computational capacity to the Grid. Security of thesesystems, due to their distributed and open nature, receives greatinterest. The growing size and profile of the grid requirecomprehensive security solutions as they are critical to thesuccess of the endeavour. A formal approach to security in thesoftware life cycle is essential to protect corporate resources.However, little thought has been given to this aspect of softwaredevelopment. Due to its criticality, security should be integratedas a formal approach in the software life cycle. A methodology ofdevelopment for secure mobile Grid computing based systems isdefined, that is to say, an engineering process that defines thesteps to follow so that starting from the necessities to solve, wecan design and construct a secure Grid system with support formobile devices that is able to solve and cover these necessities.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Vicente Benjumea, Seung G. Choi, Javier Lopez, Moti Yung
Anonymity 2.0: X.509 Extensions Supporting Privacy-friendly Authentication
In: Sixth International Workshop on Cryptology and Network Security (CANS’07), pp. 265-281, Springer Springer, Singapore, 2007.
@inproceedings{VicenteBenjumea2007ba,
title = {Anonymity 2.0: X.509 Extensions Supporting Privacy-friendly Authentication},
author = {Vicente Benjumea and Seung G. Choi and Javier Lopez and Moti Yung},
url = {/wp-content/papers/VicenteBenjumea2007ba.pdf},
year = {2007},
date = {2007-12-01},
urldate = {2007-12-01},
booktitle = {Sixth International Workshop on Cryptology and Network Security (CANS’07)},
volume = {4856},
pages = {265-281},
publisher = {Springer},
address = {Singapore},
organization = {Springer},
series = {LNCS},
abstract = {We present a semantic extension to X.509 certificates that allows incorporating new anonymity signature schemes into the X.509 framework. This fact entails advantages to both components. On the one hand, anonymous signature schemes benefit from all the protocols and infrastructure that the X.509 framework provides. On the other hand, the X.509 framework incorporates anonymity as a very interesting new feature. This semantic extension is part of a system that provides user’s controlled anonymous authorization under the X.509 framework. Additionally, the proposal directly fits themuch active Identity 2.0 effort,where anonymity is a major supplementary feature that increases the self-control of one’s identity and privacy which is at the center of the activity.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rodrigo Roman, Carmen Fernandez-Gago, Javier Lopez
Featuring Trust and Reputation Management Systems for Constrained Hardware Devices
In: 1st International Conference on Autonomic Computing and Communication Systems (Autonomics’07), ICST ICST, Rome (Italy), 2007, ISBN: 978-963-9799-09-7.
@inproceedings{Roman2007c,
title = {Featuring Trust and Reputation Management Systems for Constrained Hardware Devices},
author = {Rodrigo Roman and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/Roman2007c.pdf},
isbn = {978-963-9799-09-7},
year = {2007},
date = {2007-10-01},
urldate = {2007-10-01},
booktitle = {1st International Conference on Autonomic Computing and Communication Systems (Autonomics’07)},
publisher = {ICST},
address = {Rome (Italy)},
organization = {ICST},
abstract = {Research on trust management systems for wireless sensor networks is still at a very early stage and few works have done so far. It seems that for those works which deal with the topic general features of how these systems should be are not clearly identified. In this paper we try to identify the main features that a trust management system should have and justify their importance for future developments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Rodrigo Roman, Javier Lopez
Análisis de primitivas criptográficas para redes de sensores
In: VI Jornadas de Ingeniería Telemática (JITEL’07), pp. 401-408, Málaga (Spain), 2007, ISBN: 978-84-690-6670-6.
@inproceedings{Alcaraz2007,
title = {An\'{a}lisis de primitivas criptogr\'{a}ficas para redes de sensores},
author = {Cristina Alcaraz and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Alcaraz2007.pdf
http://www.telematica.ws/jitel/2007/},
isbn = {978-84-690-6670-6},
year = {2007},
date = {2007-09-01},
urldate = {2007-09-01},
booktitle = {VI Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’07)},
pages = {401-408},
address = {M\'{a}laga (Spain)},
abstract = {Security in wireless sensor networks is very limited due to highly-constrained hardware of sensor nodes. To protect services is necessary to use secure foundations, known as security primitives, like part of a protocol. Theses primitives must assure at least confidentiality in the communication channel, authentication of the peers involved in an information exchange, and integrity of the messages. There are many primitives such as symmetric encryption, hash functions and public key cryptography, but not all of them can be supported by sensor nodes since require high resource levels, for example memory. This paper contains a deep analysis of available and suitable security primitives for sensor nodes, as well as an analysis of hardware and software implementations. Besides, it has been developed an experiment with two implementations, and it has been created a new and improved version using the optimizations of each.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Cristina Alcaraz
Applicability of Public Key Infrastructures in Wireless Sensor Networks
In: European PKI Workshop: Theory and Practice (EuroPKI’07), pp. 313-320, Springer Springer, Mallorca (Spain), 2007, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Roman2007b,
title = {Applicability of Public Key Infrastructures in Wireless Sensor Networks},
author = {Rodrigo Roman and Cristina Alcaraz},
url = {/wp-content/papers/Roman2007b.pdf
http://www.springerlink.com/content/q4l10ww348010131/},
doi = {10.1007/978-3-540-73408-6_22},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2007},
date = {2007-06-01},
urldate = {2007-06-01},
booktitle = {European PKI Workshop: Theory and Practice (EuroPKI’07)},
volume = {4582},
pages = {313-320},
publisher = {Springer},
address = {Mallorca (Spain)},
organization = {Springer},
series = {LNCS},
abstract = {Wireless Sensor Networks (WSN) are becoming a key technology in the support of pervasive and ubiquitous services. The previous notion of PKC is too expensive for WSN has changed partially due to the existence of new hardware and software prototypes based on Elliptic Curve Cryptography and other PKC primitives. Then, it is necessary to analyze whether it is both feasible and convenient to have a Public Key Infrastructure for sensor networks that would allow the creation of PKC-based services like Digital Signatures.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Javier Lopez, Jose A. Montenegro
Attribute delegation in ubiquitous environments
In: 3rd international conference on Mobile multimedia communications (MobiMedia ’07), pp. 43:1–43:6, ICST ICST, Nafpaktos, Greece, 2007, ISBN: 978-963-06-2670-5.
@inproceedings{Agudo2007a,
title = {Attribute delegation in ubiquitous environments},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/Agudo2007a.pdf},
isbn = {978-963-06-2670-5},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {3rd international conference on Mobile multimedia communications (MobiMedia ’07)},
pages = {43:1\textendash43:6},
publisher = {ICST},
address = {Nafpaktos, Greece},
organization = {ICST},
abstract = {When delegation is implemented using the attribute certificates in a Privilege Management Infrastructure (PMI), this one reaches a considerable level of distributed functionality. However, the approach is not flexible enough for the requirements of ubiquitous environments. Additionally, the PMI can become a too complex solution for devices such as smartphones and PDAs, where resources are limited. In this work, we solve the previous limitations by defining a second class of attributes, called domain attributes, which are managed directly by users and are not right under the scope of the PMI, thus providing a light solution for constrained devices. The two classes of attributes are related by defining a simple ontology. We also introduce in the paper the concept of Attribute Federation which is responsible for supporting domain attributes and the corresponding ontology.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Mildrey Carbonell, Jose Maria Sierra, Jose A. Onieva, Javier Lopez, Jianying Zhou
Estimation of TTP Features in Non-repudiation Service
In: 7th International Conference on Computational Science and Its Applications (ICCSA’07), pp. 549-558, Springer Springer, 2007.
@inproceedings{MildreyCarbonell2007a,
title = {Estimation of TTP Features in Non-repudiation Service},
author = {Mildrey Carbonell and Jose Maria Sierra and Jose A. Onieva and Javier Lopez and Jianying Zhou},
doi = {10.1007/978-3-540-74477-1_51},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {7th International Conference on Computational Science and Its Applications (ICCSA’07)},
volume = {4706},
pages = {549-558},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {In order to achieve a high performance in a real implementation of the non-repudiation service it is necessary to estimate timeouts, TTP features, publication key time, number of originators and recipients, and other relevant parameters. An initial work of the authors focused on a basic event-oriented simulation model for the estimation of timeouts. In the actual work, we present a set of extensions to that basic model for the estimation of the TTP features (storage capacity and ftp connection capacity). We present and analyze the new and valuable results obtained.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez, Mario Piattini
Hacia un Proceso sistemático para el desarrollo de sistemas Grid Seguros con Dispositivos Móviles
In: IV Congreso Iberoamericano de Seguridad Informática (CIBSI’07), pp. 111-124, Sebastián Cañón, M.A. Sebastián Cañón, M.A., Mar del Plata, Argentina, 2007, ISBN: 978-950-623-043-2.
@inproceedings{Rosado2007,
title = {Hacia un Proceso sistem\'{a}tico para el desarrollo de sistemas Grid Seguros con Dispositivos M\'{o}viles},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez and Mario Piattini},
isbn = {978-950-623-043-2},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {IV Congreso Iberoamericano de Seguridad Inform\'{a}tica (CIBSI’07)},
pages = {111-124},
publisher = {Sebasti\'{a}n Ca\~{n}\'{o}n, M.A.},
address = {Mar del Plata, Argentina},
organization = {Sebasti\'{a}n Ca\~{n}\'{o}n, M.A.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Isaac Agudo, Javier Lopez, Jose A. Montenegro
Implementation aspects of a delegation system
In: 3rd international conference on Mobile multimedia communications (MobiMedia ’07), pp. 50:1–50:6, ICST ICST, Nafpaktos, Greece, 2007, ISBN: 978-963-06-2670-5.
@inproceedings{Agudo2007,
title = {Implementation aspects of a delegation system},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/Agudo2007.pdf},
isbn = {978-963-06-2670-5},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {3rd international conference on Mobile multimedia communications (MobiMedia ’07)},
pages = {50:1\textendash50:6},
publisher = {ICST},
address = {Nafpaktos, Greece},
organization = {ICST},
abstract = {In this paper we simulate an authorization and delegation system using knowledge based technology. This proposal is part of a visual tool that is intended to be an implementation of the theoretical model weighted trust graph (WTG). A brief description of WTG Model and its associated tool is included in the text. In essence, the model is based on the inclusion of real numbers between zero and one in certificates to represent the trust level between the entities involved in them. This trust level is used to control delegation. Moreover, attributes from di_erent domains may be interrelated, so attribute delegation is also taken into account. The proposed Simulation Engine supports one directional and bidirectional search algorithms.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Magdalena Payeras, Josep L. Ferrer-Gomila, Lloren Huguet Rotger, Jose A. Onieva
Incompatibilidades entre Propiedades de los Protocolos de Intercambio Equitativo de Valores
In: Lidia Fuentes, Javier Lopez, Pedro Merino (Ed.): VI Jornadas de Ingeniería Telemática (JITEL’07), pp. 605-608, Universidad de Malaga Universidad de Malaga, 2007, ISBN: 978-84-690-6670-6.
@inproceedings{M.MagdalenaPayerasCapella2007,
title = {Incompatibilidades entre Propiedades de los Protocolos de Intercambio Equitativo de Valores},
author = {Magdalena Payeras and Josep L. Ferrer-Gomila and Lloren Huguet Rotger and Jose A. Onieva},
editor = {Lidia Fuentes and Javier Lopez and Pedro Merino},
isbn = {978-84-690-6670-6},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {VI Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’07)},
pages = {605-608},
publisher = {Universidad de Malaga},
organization = {Universidad de Malaga},
abstract = {Sets of ideal properties are defined for different kinds of protocols designed for e-commerce applications. These sets are used as a start point in the design and then as a tool to evaluate the quality of the protocols. This is the case of fair exchange protocols and their application to electronic contract signing and certified electronic mail. However, in this area does not exist an agreement about which properties are ideal. Instead we can find properties described by different authors to his convenience. We illustrate the contradictions that appear between some of these properties.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Carmen Fernandez-Gago, Rodrigo Roman, Javier Lopez
A Survey on the Applicability of Trust Management Systems for Wireless Sensor Networks
In: 3rd International Workshop on Security, Privacy and Trust in Pervasive and Ubiquitous Computing (SecPerU’07), pp. 25-30, IEEE Computer Society IEEE Computer Society, Istanbul (Turkey), 2007.
@inproceedings{FernandezGago2007,
title = {A Survey on the Applicability of Trust Management Systems for Wireless Sensor Networks},
author = {Carmen Fernandez-Gago and Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/FernandezGago2007.pdf},
doi = {10.1109/SECPERU.2007.3},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {3rd International Workshop on Security, Privacy and Trust in Pervasive and Ubiquitous Computing (SecPerU’07)},
pages = {25-30},
publisher = {IEEE Computer Society},
address = {Istanbul (Turkey)},
organization = {IEEE Computer Society},
abstract = {Trust plays an important role in human life environments and virtual organizations. In the context of a network, trust may help its elements to decide whether another member of the same network is being uncooperative or malicious. Trust becomes quite important in self-configurable and autonomous systems, such as wireless sensor networks (WSN). However, very little effort has been done in the field of trust management in WSN. On the other hand, some efforts have been made in quite related fields such as Ad-hoc and P2P networks. In this paper we give an overview of existing trust management solutions, mainly those developed for Ad-Hoc and P2P networks and, more importantly, investigate their suitability to WSN. We also provide some guidelines to aid the development of trust management systems for WSN according to the nature of these networks.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Pablo Najera, Javier Lopez
Aplicación de la Tecnología RFID a Entornos Sanitarios
In: 2nd International Workshop of Ubiquitous Computing & Ambient Intelligence (wUCAmI’06), pp. 83-95, University of Castilla La Mancha University of Castilla La Mancha, Puertollano, Ciudad Real (Spain), 2006, ISBN: 84-6901744-6.
@inproceedings{Najera2006,
title = {Aplicaci\'{o}n de la Tecnolog\'{i}a RFID a Entornos Sanitarios},
author = {Pablo Najera and Javier Lopez},
isbn = {84-6901744-6},
year = {2006},
date = {2006-11-01},
urldate = {2006-11-01},
booktitle = {2nd International Workshop of Ubiquitous Computing \& Ambient Intelligence (wUCAmI’06)},
pages = {83-95},
publisher = {University of Castilla La Mancha},
address = {Puertollano, Ciudad Real (Spain)},
organization = {University of Castilla La Mancha},
abstract = {La tecnolog\'{i}a RFID, que permite la identificaci\'{o}n \'{u}nica de cualquier ser u objeto sin necesidad de contacto ni l\'{i}nea de visi\'{o}n directa, se est\'{a} adoptando ampliamente en todo tipo de campos al producir un salto cualitativo en la integraci\'{o}n de la inform\'{a}tica con el entorno. En este art\'{i}culo se muestra su estado del arte y se afrontan dos soluciones orientadas a paliar las necesidades en entornos sanitarios. Por un lado, un sistema de seguimiento de dispositivos en el interior de un centro m\'{e}dico que permite su localizaci\'{o}n inmediata y la prevenci\'{o}n de hurtos usando RFID pasivo UHF con un testeo de fiabilidad, y por otro, una soluci\'{o}n de control y atenci\'{o}n de pacientes ingresados en planta usando RFID pasivo HF obteni\'{e}ndose un demostrador plenamente funcional},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Javier Lopez, Jose A. Montenegro
Attributes Delegation Based on Ontologies and Context Information
In: 10th IFIP TC-6 TC-11 International Conference on Communications and Multimedia on Security (CMS’06), pp. 54-66, Springer Springer, Heraklion, Crete, 2006, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{IsaacAgudo2006,
title = {Attributes Delegation Based on Ontologies and Context Information},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/IsaacAgudo2006.pdf},
doi = {10.1007/11909033_6},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2006},
date = {2006-10-01},
urldate = {2006-10-01},
booktitle = {10th IFIP TC-6 TC-11 International Conference on Communications and Multimedia on Security (CMS’06)},
volume = {4237},
pages = {54-66},
publisher = {Springer},
address = {Heraklion, Crete},
organization = {Springer},
series = {LNCS},
abstract = {This paper presents a model for delegation based on partial orders, proposing the subclass relation in OWL as a way to represent the partial orders. Delegation and authorization decisions are made based on the context. In order to interact with the context, we define the Type of a credential as a way to introduce extra information regarding context constraints. When reasoning about delegation and authorization relationships, our model benefits from partial orders, defining them over entities, attributes and the credential type. Using these partial orders, the number of credentials required is reduced. It also classifies the possible criteria for making authorization decisions based on the context, in relation to the necessary information.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Mildrey Carbonell, Jose Maria Sierra, Javier Lopez
Modelo de pago con intermediario. Su aplicación a un escenario real
In: IX Reunión Española sobre Criptología y Seguridad de la información (IX RECSI), pp. 35-46, Barcelona (Spain), 2006, ISBN: ISBN.978-84-9788-502-3.
@inproceedings{1734,
title = {Modelo de pago con intermediario. Su aplicaci\'{o}n a un escenario real},
author = {Mildrey Carbonell and Jose Maria Sierra and Javier Lopez},
isbn = {ISBN.978-84-9788-502-3},
year = {2006},
date = {2006-09-01},
urldate = {2006-09-01},
booktitle = {IX Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la informaci\'{o}n (IX RECSI)},
pages = {35-46},
address = {Barcelona (Spain)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Francisco Sanchez-Cid, Antonio Muñoz, Daniel Serrano, Carmen Fernandez-Gago
Software Engineering Techniqes Applied to AmI: Security Patterns
In: First International Conference on Ambient Intelligence Developments (AmID’06), pp. 108-123, Springer Springer, Sophia-Antipolis (France), 2006, ISBN: 978-3-642-01464-2.
@inproceedings{Cid2006,
title = {Software Engineering Techniqes Applied to AmI: Security Patterns},
author = {Francisco Sanchez-Cid and Antonio Mu\~{n}oz and Daniel Serrano and Carmen Fernandez-Gago},
url = {/wp-content/papers/Cid2006.pdf},
doi = {10.1007/978-2-287-47610-5_8},
isbn = {978-3-642-01464-2},
year = {2006},
date = {2006-09-01},
urldate = {2006-09-01},
booktitle = {First International Conference on Ambient Intelligence Developments (AmID’06)},
pages = {108-123},
publisher = {Springer},
address = {Sophia-Antipolis (France)},
organization = {Springer},
abstract = {The realization of the Ambient Intelligence concept entails many important challenges, but the most important barriers to this realization is the lack of adequate support for security. In this paper we present a conceptual model of our solution for building secure systems for AmI environments, taking as basis the concept of Security and Dependability (S\&D) Pattern as a precise representation of validated S\&D solutions and mechanisms. The main elements embedded in our solution framework (S\&D library, monitoring interface and S\&D Manager) are presented both conceptually, and also using a simple example scenario based on an hospital AmI environment.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Antonio Muñoz
A Secure and Auto-configurable Environment for Mobile Agents in Ubiquitous Computing Scenarios
In: Third International Conference on Ubiquitous Intelligence and Computing, pp. 977-987, Springer Springer, Wuhan, China, 2006.
@inproceedings{JavierLopez2006,
title = {A Secure and Auto-configurable Environment for Mobile Agents in Ubiquitous Computing Scenarios},
author = {Javier Lopez and Antonio Mana and Antonio Mu\~{n}oz},
url = {/wp-content/papers/JavierLopez2006.pdf},
year = {2006},
date = {2006-08-01},
urldate = {2006-08-01},
booktitle = {Third International Conference on Ubiquitous Intelligence and Computing},
volume = {4159},
number = {4159},
pages = {977-987},
publisher = {Springer},
address = {Wuhan, China},
organization = {Springer},
series = {LNCS},
abstract = {The increased heterogeneity and dynamism of new computing paradigms and especially of ubiquitous computing models is boosting the need for auto-configurable systems. In these new scenarios, heterogeneity and dynamism are inherent properties and applications are built by aggregating distributed information and services that are not under the control of a single entity. Furthermore, the current trend towards distributed computing poses important problems related to the need to transmit large amounts of data between the distributed nodes of the computing system; the control over the information; and the flexibility to adapt to heterogeneous client requirements. These characteristics are difficult to manage by traditional computing models. For these reasons, the mobile agent paradigm is gaining momentum and the interest of researchers and industry in this paradigm is increasing. In this paper we present a solution to provide a secure and auto-configurable environment for mobile agents in ubiquitous computing scenarios. Our approach is based on two main building blocks: trusted platforms and profiles.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Jose A. Montenegro, Rodrigo Roman
Service-Oriented Security Architecture for CII based on Sensor Networks
In: 2nd International Workshop on Security Privacy and Trust in Pervasive and Ubiquitous Computing (SecPerU’06), pp. 1-6, IEEE Press IEEE Press, Lyon, France, 2006.
@inproceedings{JavierLopez2006a,
title = {Service-Oriented Security Architecture for CII based on Sensor Networks},
author = {Javier Lopez and Jose A. Montenegro and Rodrigo Roman},
url = {/wp-content/papers/JavierLopez2006a.pdf},
year = {2006},
date = {2006-06-01},
urldate = {2006-06-01},
booktitle = {2nd International Workshop on Security Privacy and Trust in Pervasive and Ubiquitous Computing (SecPerU’06)},
pages = {1-6},
publisher = {IEEE Press},
address = {Lyon, France},
organization = {IEEE Press},
abstract = {The extraordinary growth of the Information Society is originating a high dependency on ICT. This provokes that those strongly interrelated technological infrastructures, as well as the information systems that underpin them, become highly critical, since their disruption would lead to high economical, material and, sometimes, human loss. As a consequence, the protection of these Critical Information Infrastructures is becoming a major objective for governments and companies. In this paper, we give an overview of the main challenges and open research issues on Critical Information Infrastructure security, and introduce an on-going research project that, using wireless sensor networks as an underlying technology, is dealing with those problems. Our research project focuses on the development of protection, control, evaluation, maintenance and verification mechanisms, integrated into a secure service-oriented architecture.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jianying Zhou, Jose A. Onieva, Javier Lopez
A Synchronous Multi-Party Contract Signing Protocol Improving Lower Bound of Steps
In: 21st International Information Security Conference (IFIP SEC’06), pp. 221-232, Springer Springer, 2006.
@inproceedings{JianyingZhou2006,
title = {A Synchronous Multi-Party Contract Signing Protocol Improving Lower Bound of Steps},
author = {Jianying Zhou and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/JianyingZhou2006.pdf},
doi = {10.1007/0-387-33406-8_19},
year = {2006},
date = {2006-05-01},
urldate = {2006-05-01},
booktitle = {21st International Information Security Conference (IFIP SEC’06)},
number = {201},
pages = {221-232},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Contract signing is a fundamental service in doing business. The Internet has facilitated the electronic commerce, and it is necessary to find appropriate mechanisms for contract signing in the digital world. A number of two-party contract signing protocols have been proposed with various features. Nevertheless, in some applications, a contract may need to be signed by multiple parties. Less research has been done on multi-party contract signing. In this paper, we propose a new synchronous multi-party contract signing protocol that, with n parties, it reaches a lower bound of 3(n − 1) steps in the all-honest case and 4n − 2 steps in the worst case (i.e., all parties contact the trusted third party). This is so far the most efficient synchronous multi-party contract signing protocol in terms of the number of messages required. We further consider the additional features like timeliness and abuse-freeness in the improved version.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rodrigo Roman, Jianying Zhou, Javier Lopez
Applying Intrusion Detection Systems to Wireless Sensor Networks
In: IEEE Consumer Communications & Networking Conference (CCNC 2006), pp. 640-644, IEEE IEEE, Las Vegas (USA), 2006, ISBN: 1-4244-0085-6.
@inproceedings{Roman2006,
title = {Applying Intrusion Detection Systems to Wireless Sensor Networks},
author = {Rodrigo Roman and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Roman2006.pdf},
doi = {10.1109/CCNC.2006.1593102},
isbn = {1-4244-0085-6},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
booktitle = {IEEE Consumer Communications \& Networking Conference (CCNC 2006)},
pages = {640-644},
publisher = {IEEE},
address = {Las Vegas (USA)},
organization = {IEEE},
abstract = {The research of Intrusion Detection Systems (IDS) is a mature area in wired networks, and has also attracted many attentions in wireless ad hoc networks recently. Nevertheless, there is no previous work reported in the literature about IDS architectures in wireless sensor networks. In this paper, we discuss the general guidelines for applying IDS to static sensor networks, and introduce a novel technique to optimally watch over the communications of the sensors’ neighborhood on certain scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Cristina Alcaraz, Rodrigo Roman
Applying Key Infrastructures for Sensor Networks in CIP/CIIP Scenarios
In: 1st International Workshop on Critical Information Infrastructures Security (CRITIS’06), pp. 166-178, Springer Berlin / Heidelberg Springer Berlin / Heidelberg, 2006, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Alcaraz2006,
title = {Applying Key Infrastructures for Sensor Networks in CIP/CIIP Scenarios},
author = {Cristina Alcaraz and Rodrigo Roman},
url = {/wp-content/papers/Alcaraz2006.pdf
http://www.springerlink.com/content/2458827107n14870/},
doi = {10.1007/11962977_14},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
booktitle = {1st International Workshop on Critical Information Infrastructures Security (CRITIS’06)},
volume = {4347},
pages = {166-178},
publisher = {Springer Berlin / Heidelberg},
organization = {Springer Berlin / Heidelberg},
series = {LNCS},
abstract = {It is commonly agreed that Wireless Sensor Networks (WSN) is one of the technologies that better fulfills features like the ones required by Critical (Information) Infrastructures. However, a sensor network is highly vulnerable against any external or internal attacks, thus network designers must know which are the tools that they can use in order to avoid such problems. In this paper we describe in detail a procedure (the KMS Guidelines), developed under our CRISIS project, that allows network designers to choose a certain Key Management System, or at least to know which protocol need to improve in order to satisfy the network requirements.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Javier Lopez, Rodrigo Roman, Jianying Zhou
Extension de una plataforma DRM basada en OMA con servicios de No Repudio
In: IX Reunion Española sobre Criptologia y Seguridad de la Informacion (RECSI’06), pp. 129-141, UOC S.L. UOC S.L., 2006.
@inproceedings{Onieva2006a,
title = {Extension de una plataforma DRM basada en OMA con servicios de No Repudio},
author = {Jose A. Onieva and Javier Lopez and Rodrigo Roman and Jianying Zhou},
url = {/wp-content/papers/JoseA.Onieva2006a.pdf},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
booktitle = {IX Reunion Espa\~{n}ola sobre Criptologia y Seguridad de la Informacion (RECSI’06)},
pages = {129-141},
publisher = {UOC S.L.},
organization = {UOC S.L.},
abstract = {Digital Rights Management (DRM) es un t\'{e}rmino general para cualesquiera de las soluciones que permite a un vendedor de contenido en forma electr\'{o}nica controlar el material y restringir su uso de distintas maneras. Estas soluciones son posibles, por un lado gracias a t\'{e}cnicas de la Seguridad de la Informaci\'{o}n, principalmente cifrado de datos, y por otro a la distribuci\'{o}n, de manera independiente, de contenido y derechos digitales. Esto permite que los consumidores puedan acceder libremente al contenido, pero s\'{o}lo aquellos que adquieran el derecho digital apropiado (RO) podr\'{a}n procesarlo. Como servicio de seguridad considerado en diversas capas del marco de seguridad definido por la recomendaci\'{o}n ITU X.805, casi todas las aplicaciones necesitan considerar la propiedad de no repudio en las etapas iniciales de su dise\~{n}o. Desafortunadamente, esto no ha sido as\'{i} en general, y m\'{a}s concretamente en especificaciones DRM; debido a consideraciones en la pr\'{a}ctica y al tipo de contenido a distribuir. Analizamos este servicio para un marco de DRM y proporcionamos una soluci\'{o}n que permita que la adquisici\'{o}n de derechos digitales sea un operaci\'{o}n que no pueda repudiarse.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Isaac Agudo, Javier Lopez, Jose A. Montenegro
Graphical Representation of Authorization Policies for Weighted Credentials
In: 11th Australasian Conference on Information Security and Privacy (ACISP’06), pp. 383-394, Springer Springer, Melbourne, Australia, 2006, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Agudo2006a,
title = {Graphical Representation of Authorization Policies for Weighted Credentials},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/Agudo2006a.pdf},
doi = {10.1007/11780656_32},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
booktitle = {11th Australasian Conference on Information Security and Privacy (ACISP’06)},
volume = {4058},
pages = {383-394},
publisher = {Springer},
address = {Melbourne, Australia},
organization = {Springer},
series = {LNCS},
abstract = {This paper elaborates on a solution to represent authorization and delegation in a graphical way, allowing users to better interpret delegation relationships. We make use of Weighted Trust Graph (WTG) as an instrument to represent delegation and authorization, extending it to cope with more complicated concepts, and providing a graphical representation of the level of confidence that exists between two entities regarding a resource or attribute. We represent the level of confidence for each pair of entities as a point in an axis diagram, as a set of points, or as a set of triangular regions depending on the accuracy we need. Then, we use the same diagram to represent the set of acceptable confidence level, that we call authorization policy set. In this way, a single diagram can be used to decide about authorization, thus providing a powerful tool for systems in which interaction of users is needed.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Javier Lopez, Jose A. Montenegro
Políticas de delegación para credenciales ponderadas y su representación gráfica
In: IX Reunión Española sobre Criptología y Seguridad de la información (RECSI’06), pp. 311-322, Barcelona, Spain, 2006, ISBN: 84-9788-502-3.
BibTeX | Links:
@inproceedings{IsaacAgudo2006a,
title = {Pol\'{i}ticas de delegaci\'{o}n para credenciales ponderadas y su representaci\'{o}n gr\'{a}fica},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/IsaacAgudo2006a.pdf},
isbn = {84-9788-502-3},
year = {2006},
date = {2006-00-01},
urldate = {2006-00-01},
booktitle = {IX Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la informaci\'{o}n (RECSI’06)},
pages = {311-322},
address = {Barcelona, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Sokratis K. Katsikas, Javier Lopez, Guenther Pernul
Trust, Privacy and Security in E-business: Requirements and Solutions
In: 10th Panhellenic Conference in Informatics (PCI’05), pp. 548-558, Springer Springer, Volos, Greece, 2005.
@inproceedings{SokratisKatsikas2005,
title = {Trust, Privacy and Security in E-business: Requirements and Solutions},
author = {Sokratis K. Katsikas and Javier Lopez and Guenther Pernul},
url = {/wp-content/papers/SokratisKatsikas2005.pdf},
year = {2005},
date = {2005-11-01},
urldate = {2005-11-01},
booktitle = {10th Panhellenic Conference in Informatics (PCI’05)},
volume = {3746},
pages = {548-558},
publisher = {Springer},
address = {Volos, Greece},
organization = {Springer},
series = {LNCS},
abstract = {An important aspect of e-business is the area of e-commerce. One of the most severe restraining factors for the proliferation of e-commerce, is the lack of trust between customers and sellers, consumer privacy concerns and the lack of security measures required to assure both businesses and customers that their business relationship and transactions will be carried out in privacy, correctly, and timely. This paper considers trust privacy and security issues in e-commerce applications and discusses methods and technologies that can be used to fulfil the pertinent requirements.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Javier Lopez, Jianying Zhou
Aplicación de Sistemas de Detección de Intrusiones en Redes de Sensores
In: Simposio sobre Computación Ubicua e Inteligencia Ambiental (UCAmI’05), pp. 113-120, Granada (Spain), 2005.
@inproceedings{Roman2005b,
title = {Aplicaci\'{o}n de Sistemas de Detecci\'{o}n de Intrusiones en Redes de Sensores},
author = {Rodrigo Roman and Javier Lopez and Jianying Zhou},
url = {/wp-content/papers/Roman2005b.pdf},
year = {2005},
date = {2005-09-01},
urldate = {2005-09-01},
booktitle = {Simposio sobre Computaci\'{o}n Ubicua e Inteligencia Ambiental (UCAmI’05)},
pages = {113-120},
address = {Granada (Spain)},
abstract = {Los sistemas de detecci\'{o}n de intrusiones (IDS) son una herramienta imprescindible de seguridad a la hora de proteger una red. Recientemente se han investigado y desarrollado arquitecturas de IDS para redes inal\'{a}mbricas, en concreto para redes "Ad Hoc". No obstante, no existe un trabajo previo que desarrolle una arquitectura de IDS para una red de sensores. En este art\'{i}culo, analizamos porque los sistemas IDS de redes "Ad Hoc" no pueden aplicarse a redes de sensores, e introducimos una arquitectura de IDS para redes de sensores que incorpora una nueva t\'{e}cnica para vigilar las comunicaciones de la red en ciertos escenarios.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rodrigo Roman, Javier Lopez, Jianying Zhou
Protección contra el Spam Utilizando Desafíos a Priori
In: V Jornadas de Ingeniería Telemática (JITEL’05), pp. 375-382, Vigo (Spain), 2005.
@inproceedings{Roman2005a,
title = {Protecci\'{o}n contra el Spam Utilizando Desaf\'{i}os a Priori},
author = {Rodrigo Roman and Javier Lopez and Jianying Zhou},
url = {/wp-content/papers/Roman2005a.pdf},
year = {2005},
date = {2005-09-01},
urldate = {2005-09-01},
booktitle = {V Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’05)},
pages = {375-382},
address = {Vigo (Spain)},
abstract = {Spam is considered to be one of the biggest problems in messaging systems. In the area of email Spam, A high number of anti-spam schemes have been proposed and deployed, but the problem has yet been well addressed. In this paper, we introduce a new scheme, called pre-challenge scheme, which avoids problems that exists in other schemes such as delay of service and denial of service. Some new mechanisms are employed to reach a good balance between security against Spam and convenience to email users. In addition, our scheme can be used for protecting other types of messaging systems, such as Instant Messaging (IM) and Blogs, against Spam.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Antonio Muñoz, Jose A. Onieva, Javier Lopez
On Secure Profiling
In: 1st International Workshop on Secure Ubiquitous Networks (SUN’05), pp. 214-218, IEEE Press IEEE Press, 2005.
@inproceedings{AntonioMunoz2005,
title = {On Secure Profiling},
author = {Antonio Mu\~{n}oz and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/AntonioMunoz2005.pdf},
doi = {10.1109/DEXA.2005.146},
year = {2005},
date = {2005-08-01},
urldate = {2005-08-01},
booktitle = {1st International Workshop on Secure Ubiquitous Networks (SUN’05)},
pages = {214-218},
publisher = {IEEE Press},
organization = {IEEE Press},
abstract = {Ubiquitous environments have several drawbacks to be solved. Most of them are focused on security, and relevant ones are authorization and authentication. Amongst the essential elements to adequately provide solutions, we can find profiles. A profile can be defined as a repository to store structured data from users, networks, devices, applications, etc. As profiles are needed in ubiquitous environments, and these need of secure management as well, in this paper, we provide some initial guidance on the security storage of profiles and on security levels needed for each type of profile. Additionally, we review different alternatives to bear profiles, concluding that smartcards are the most suitable devices.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Rolf Oppliger, Guenther Pernul
Classifying Public Key Certificates
In: 2nd European PKI Workshop: Research and Applications (EuroPKI’05), pp. 135-143, Springer Springer, Canterbury, U.K., 2005.
@inproceedings{JavierLopez2005a,
title = {Classifying Public Key Certificates},
author = {Javier Lopez and Rolf Oppliger and Guenther Pernul},
url = {/wp-content/papers/JavierLopez2005a.pdf},
year = {2005},
date = {2005-06-01},
urldate = {2005-06-01},
booktitle = {2nd European PKI Workshop: Research and Applications (EuroPKI’05)},
volume = {3545},
pages = {135-143},
publisher = {Springer},
address = {Canterbury, U.K.},
organization = {Springer},
series = {LNCS},
abstract = {In spite of the fact that there are several companies that (try to) sell public key certificates, there is still no unified or standardized classification scheme that can be used to compare and put into perspective the various offerings. In this paper, we try to start filling this gap and propose a four-dimensional scheme that can be used to uniformly describe and classify public key certificates. The scheme distinguishes between (i) who owns a certificate, (ii) how the certificate owner is registered, (iii) on what medium the certificate (or the private key, respectively) is stored, and (iv) what type of functionality the certificate is intended to be used for. We think that using these or similar criteria to define and come up with unified or even standardized classes of public key certificate is useful and urgently needed in practice.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Javier Lopez
Especificación de Sistemas Electrónicos de Microdonaciones
In: III Simposio Español de Comercio Electrónico, pp. 95-104, Palma (Spain), 2005.
@inproceedings{Roman2005c,
title = {Especificaci\'{o}n de Sistemas Electr\'{o}nicos de Microdonaciones},
author = {Rodrigo Roman and Javier Lopez},
url = {/wp-content/papers/Roman2005c.pdf},
year = {2005},
date = {2005-06-01},
urldate = {2005-06-01},
booktitle = {III Simposio Espa\~{n}ol de Comercio Electr\'{o}nico},
pages = {95-104},
address = {Palma (Spain)},
abstract = {Los sistemas electr\'{o}nicos de pago permiten que un comprador adquiera a un vendedor una serie de productos y servicios de forma virtual. Sin embargo, estos sistemas no tienen en cuenta el escenario en el que un comprador se convierte en donante, accediendo al servicio de forma gratuita. En este art\'{i}culo se presenta el concepto y caracter\'{i}sticas de las microdonaciones, o la donaci\'{o}n de cantidades tan peque\~{n}as como un c\'{e}ntimo de euro en el contexto del comercio electr\'{o}nico. Tambi\'{e}n se muestra como la microdonaci\'{o}n es algo necesario en el contexto actual de Internet, y como es posible su implementaci\'{o}n bas\'{a}ndose en sistemas de micropago.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rodrigo Roman, Jianying Zhou, Javier Lopez
Protection Against Spam using Pre-Challenges
In: Ryôichi Sasaki, Sihan Qing, Eiji Okamoto, Hiroshi Yoshiura (Ed.): 20th IFIP International Information Security Conference (IFIP-SEC’05), pp. 281-294, Springer Springer, Chiba (Japan), 2005, ISBN: 0-387-25658-X.
@inproceedings{Roman2005d,
title = {Protection Against Spam using Pre-Challenges},
author = {Rodrigo Roman and Jianying Zhou and Javier Lopez},
editor = {Ry\^{o}ichi Sasaki and Sihan Qing and Eiji Okamoto and Hiroshi Yoshiura},
url = {/wp-content/papers/Roman2005d.pdf},
isbn = {0-387-25658-X},
year = {2005},
date = {2005-05-01},
urldate = {2005-05-01},
booktitle = {20th IFIP International Information Security Conference (IFIP-SEC’05)},
pages = {281-294},
publisher = {Springer},
address = {Chiba (Japan)},
organization = {Springer},
abstract = {Spam turns out to be an increasingly serious problem to email users. A number of anti-spam schemes have been proposed and deployed, but the problem has yet been well addressed. One of those schemes is challenge-response, in which a challenge is imposed on an email sender. However, such a scheme introduces new problems for the users, e.g., delay of service and denial of service attacks. In this paper, we introduce a pre-challenge scheme that avoids those problems. It assumes each user has a challenge that is defined by the user himself/herself and associated with his/her email address, in such a way that an email sender can simultaneously retrieve a new receiver’s email address and challenge before sending an email in the first contact. Some new mechanisms are employed to reach a good balance between security against spam and convenience to email users.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Javier Lopez, Jose A. Montenegro
A Representation Model of Trust Relationships with Delegation Extensions
In: 3th International Conference on Trust Management (iTRUST’05), pp. 9-22, Springer Springer, Versailles, France, 2005, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{IsaacAgudo2005b,
title = {A Representation Model of Trust Relationships with Delegation Extensions},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro},
url = {/wp-content/papers/IsaacAgudo2005b.pdf},
doi = {10.1007/11429760_9},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2005},
date = {2005-05-01},
urldate = {2005-05-01},
booktitle = {3th International Conference on Trust Management (iTRUST’05)},
volume = {3477},
pages = {9-22},
publisher = {Springer},
address = {Versailles, France},
organization = {Springer},
series = {LNCS},
abstract = {Logic languages establish a formal framework to solve authorization and delegation conflicts. However, we consider that a visual representation is necessary since graphs are more expressive and understandable than logic languages. In this paper, and after overviewing previous works using logic languages, we present a proposal for graph representation of authorization and delegation statements. Our proposal is based on Varadharajan et al. solution, though improve several elements of that work. We also discuss about the possible implementation of our proposal using attribute certificates.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Rodrigo Roman, Jianying Zhou, Javier Lopez
On the Security of Wireless Sensor Networks
In: Computational Science and Its Applications (ICCSA’05), pp. 681-690, Springer Springer, Singapore, 2005, ISSN: 0302-9743 (Print) 1611-3349 (Online).
@inproceedings{Roman2005e,
title = {On the Security of Wireless Sensor Networks},
author = {Rodrigo Roman and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Roman2005e.pdf
http://www.springerlink.com/content/pvnd4eu8b7acgtpe/},
doi = {10.1007/11424857_75},
issn = {0302-9743 (Print) 1611-3349 (Online)},
year = {2005},
date = {2005-05-01},
urldate = {2005-05-01},
booktitle = {Computational Science and Its Applications (ICCSA’05)},
volume = {3482},
pages = {681-690},
publisher = {Springer},
address = {Singapore},
organization = {Springer},
series = {LNCS},
abstract = {Wireless Sensor Networks are extremely vulnerable against any kind of internal or external attacks, due to several factors such as resource-constrained nodes and lack of tamper-resistant packages. As a result, security must be an important factor to have in mind when designing the infrastructure and protocols of sensor networks. In this paper we survey the state-of-the-art security issues in sensor networks and highlight the open areas of research.security issues in sensor networks and highlight the open areas of research.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Javier Lopez, Jose A. Montenegro, Eiji Okamoto, Ed Dawson
Delegation Perspective of Practical Authorization Schemes
In: Fifth International Network Conference (INC’05), pp. 157-164, Samos Island, Greece, 2005, ISBN: 960-7475-32-1.
BibTeX | Links:
@inproceedings{IsaacAgudo2005a,
title = {Delegation Perspective of Practical Authorization Schemes},
author = {Isaac Agudo and Javier Lopez and Jose A. Montenegro and Eiji Okamoto and Ed Dawson},
url = {/wp-content/papers/IsaacAgudo2005a.pdf},
isbn = {960-7475-32-1},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
booktitle = {Fifth International Network Conference (INC’05)},
pages = {157-164},
address = {Samos Island, Greece},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jose A. Onieva, Jianying Zhou, Javier Lopez, Rodrigo Roman
Extending an OMA-based DRM Framework with Non-Repudiation Services
In: 5th Symposium on Signal Processing and Information Technology (ISSPIT’05), pp. 472-477, IEEE IEEE, 2005.
@inproceedings{Onieva2005,
title = {Extending an OMA-based DRM Framework with Non-Repudiation Services},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez and Rodrigo Roman},
url = {/wp-content/papers/Onieva2005.pdf},
doi = {10.1109/ISSPIT.2005.1577143},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
booktitle = {5th Symposium on Signal Processing and Information Technology (ISSPIT’05)},
pages = {472-477},
publisher = {IEEE},
organization = {IEEE},
abstract = {Digital Rights Management (DRM) is an umbrella term for any of several arrangements which allows a vendor of content in electronic form to control the material and restrict its usage in various ways that can be specified by the vendor. These arrangements are provided through security techniques, mainly encryption, and the distribution, in a detached manner, of content and rights. This allows free access to the content by the consumers, but only those carrying the proper Right Object (RO) will be able to process such content. As a security service considered in different layers of the security framework defined by ITU X.805, almost all applications need to consider non-repudiation in the very beginning of their design. Unfortunately this has not been done so far in DRM specifications due to practical issues and the type of content distributed. We analyze this service for the a DRM framework and provide a solution which allows the right objects acquisition to be undeniable.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Mildrey Carbonell, Jose A. Onieva, Javier Lopez, Jianying Zhou
Modelo de Simulacion para la Estimacion de Parametros en los protocolos de no Repudio
In: III Simposio Español de Comercio Electronico (SCE’05), pp. 151-164, Universitat de les Illes Balears Universitat de les Illes Balears, 2005, ISBN: 84-7632-929-6.
@inproceedings{MildreyCarbonell2005,
title = {Modelo de Simulacion para la Estimacion de Parametros en los protocolos de no Repudio},
author = {Mildrey Carbonell and Jose A. Onieva and Javier Lopez and Jianying Zhou},
url = {/wp-content/papers/MildreyCarbonell2005.pdf},
isbn = {84-7632-929-6},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
booktitle = {III Simposio Espa\~{n}ol de Comercio Electronico (SCE’05)},
pages = {151-164},
publisher = {Universitat de les Illes Balears},
organization = {Universitat de les Illes Balears},
abstract = {El no repudio es un requisito de seguridad cuya importancia se ha hecho evidente con el crecimiento del comercio electr\'{o}nico. Muchos protocolos se han desarrollado como soluci\'{o}n a este requisito. La gran mayor\'{i}a incluye en su especificaci\'{o}n par\'{a}metros cuyos valores no son f\'{a}ciles de especificar pues dependen de las condiciones reales de implementaci\'{o}n del mismo como los tiempos l\'{i}mites, las caracter\'{i}sticas de la TTP, tiempo de publicaci\'{o}n de las claves, etc. En este trabajo proponemos un modelo que nos ayudar\'{a} en la estimaci\'{o}n de esos par\'{a}metros basado en la simulaci\'{o}n del escenario real. Para la explicaci\'{o}n y prueba del modelo mostramos un conjunto de experimentos.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Kun Peng, Ed Dawson, Juan M. Gonzalez-Nieto, Eiji Okamoto, Javier Lopez
A Novel Method To Maintain Privacy in Mobile Agent Applications
In: Fourth International Conference on Cryptology and Network Security (CANS’05), pp. 247-260, Springer Springer, 2005, ISBN: 978-3-540-30849-2.
BibTeX | Links:
@inproceedings{1716,
title = {A Novel Method To Maintain Privacy in Mobile Agent Applications},
author = {Kun Peng and Ed Dawson and Juan M. Gonzalez-Nieto and Eiji Okamoto and Javier Lopez},
url = {/wp-content/papers/1716.pdf},
isbn = {978-3-540-30849-2},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
booktitle = {Fourth International Conference on Cryptology and Network Security (CANS’05)},
volume = {3810},
pages = {247-260},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Antonio Muñoz, Jose A. Onieva, Javier Lopez
Perfiles Seguros para Comercio Movil
In: III Simposio Español de Comercio Electronico (SCE’05), pp. 235-244, Universitat de les Illes Balears Universitat de les Illes Balears, 2005.
@inproceedings{AntonioMunoz2005a,
title = {Perfiles Seguros para Comercio Movil},
author = {Antonio Mu\~{n}oz and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/AntonioMunoz2005a.pdf},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
booktitle = {III Simposio Espa\~{n}ol de Comercio Electronico (SCE’05)},
pages = {235-244},
publisher = {Universitat de les Illes Balears},
organization = {Universitat de les Illes Balears},
abstract = {Los escenarios de comercio m\'{o}vil existentes en la actualidad presentan muchas deficiencias. La mayor\'{i}a de estos escenarios, como no podr\'{i}a ser de otra forma, tienen en cuenta aspectos relativos a la seguridad, prestando especial atenci\'{o}n a las propiedades de Autenticaci\'{o}n y Autorizaci\'{o}n. De entre los elementos esenciales que se utilizan para proporcionar estos servicios de seguridad, los perfiles son un elemento com\'{u}n que permiten la personalizaci\'{o}n de los servicios del usuario m\'{o}vil. Sin embargo, los perfiles tambi\'{e}n precisan de una administraci\'{o}n segura. En este trabajo presentamos unas consideraciones iniciales respecto a los distintos tipos de perfiles, sus niveles de seguridad para cada tipo, as\'{i} como indicaciones para el almacenamiento de manera segura. Por lo tanto, analizaremos las distintas alternativas como medio de almacenamiento, discuti\'{e}ndolas y prestando especial atenci\'{o}n a las tarjetas inteligentes.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Rodrigo Roman, Javier Lopez, Jianying Zhou
Análisis de Seguridad en Redes Inalámbricas de Sensores
In: V Jornadas de Ingenería Telemática (JITEL’05), pp. 335-343, Vigo (Spain), 2005.
@inproceedings{R.Roman2005,
title = {An\'{a}lisis de Seguridad en Redes Inal\'{a}mbricas de Sensores},
author = {Rodrigo Roman and Javier Lopez and Jianying Zhou},
url = {/wp-content/papers/R.Roman2005.pdf},
year = {2005},
date = {2005-00-01},
urldate = {2005-00-01},
booktitle = {V Jornadas de Ingener\'{i}a Telem\'{a}tica (JITEL’05)},
pages = {335-343},
address = {Vigo (Spain)},
abstract = {The design and development of security infrastructures and protocols for Wireless Sensor Networks is a difficult task, due to several factors like the constraints of the sensor nodes and the public nature of the communication channels. The intrinsic features of these networks create numerous security problems. In this paper, we analyze and put into perspective those problems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Jianying Zhou, Javier Lopez
Attacking an asynchronous multi-party contract signing protocol
In: Proceedings of 6th International Conference on Cryptology in India, pp. 311–321, Springer Springer, 2005.
@inproceedings{Onieva2005a,
title = {Attacking an asynchronous multi-party contract signing protocol},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Onieva2005a.pdf},
doi = {10.1007/11596219_25},
year = {2005},
date = {2005-00-01},
urldate = {2005-00-01},
booktitle = {Proceedings of 6th International Conference on Cryptology in India},
volume = {3797},
pages = {311\textendash321},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Contract signing is a fundamental service in doing business. The Internet has facilitated the electronic commerce, and it is necessary to find appropriate mechanisms for contract signing in the digital world. From a designing point of view, digital contract signing is a particular form of electronic fair exchange. Protocols for generic exchange of digital signatures exist. There are also specific protocols for two-party contract signing. Nevertheless, in some applications, a contract may need to be signed by multiple parties. Less research has been done on multi-party contract signing. In this paper, we analyze an optimistic N-party contract signing protocol, and point out its security problem, thus demonstrating further work needs to be done on the design and analysis of secure and optimistic multi-party contract signing protocols.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Isaac Agudo, Javier Lopez, Juan J. Ortega
Especificación formal y verificación de requisitos de Seguridad
In: VIII Reunión Española sobre Criptología y Seguridad de la Información (VIII RECSI), pp. 225-235, Madrid (Spain), 2004, ISBN: 84-7978-650-7.
@inproceedings{1735,
title = {Especificaci\'{o}n formal y verificaci\'{o}n de requisitos de Seguridad},
author = {Isaac Agudo and Javier Lopez and Juan J. Ortega},
isbn = {84-7978-650-7},
year = {2004},
date = {2004-09-01},
urldate = {2004-09-01},
booktitle = {VIII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (VIII RECSI)},
pages = {225-235},
address = {Madrid (Spain)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jianying Zhou, Jose A. Onieva, Javier Lopez
Analysis of a Free Roaming Agent Result-Truncation Defense Scheme
In: 6th Conference on E-Commerce (CEC’04), pp. 221-226, IEEE Computer Society IEEE Computer Society, 2004.
@inproceedings{JianyingZhou2004,
title = {Analysis of a Free Roaming Agent Result-Truncation Defense Scheme},
author = {Jianying Zhou and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/JianyingZhou2004.pdf},
doi = {10.1109/ICECT.2004.1319737},
year = {2004},
date = {2004-06-01},
urldate = {2004-06-01},
booktitle = {6th Conference on E-Commerce (CEC’04)},
pages = {221-226},
publisher = {IEEE Computer Society},
organization = {IEEE Computer Society},
abstract = {Mobile agents play an important role in electronic commerce. Security in free-roaming agents is especially hard to achieve when the mobile code is executed in hosts that may behave maliciously. Some schemes have been proposed to protect agent data (or computation results). However, a known vulnerability of these techniques is the truncation attack where two visited hosts (or one revisited host) can collude to discard the partial results collected between their respective visits. Cheng and Wei proposed a scheme in ICICS’02 to defense against the truncation of computation results of free-roaming agents. Cheng-Wei scheme is effective against such an attack in most cases. However, we demonstrate that it still suffers from the truncation attack when a special loop is established on the path of a free-roaming agent. We further propose two amendments to Cheng-Wei scheme to avoid such an attack.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Jose A. Montenegro, Rolf Oppliger, Guenther Pernul
On a Taxonomy of Systems for Authentication and/or Authorization Services
In: TERENA Networking Conference, Rhodes, Greece, 2004.
@inproceedings{JavierLopez2004a,
title = {On a Taxonomy of Systems for Authentication and/or Authorization Services},
author = {Javier Lopez and Jose A. Montenegro and Rolf Oppliger and Guenther Pernul},
url = {/wp-content/papers/JavierLopez2004a.pdf},
year = {2004},
date = {2004-06-01},
urldate = {2004-06-01},
booktitle = {TERENA Networking Conference},
address = {Rhodes, Greece},
abstract = {In this work we elaborate on a taxonomy of systems that provide either joint solutions for both authentication and authorization problems, or solutions for only one of the problems. Basically, we do not focus our work on theoretical systems that have been proposed only in the literature. On the other hand, we focus on: (i) systems that are already developed; (ii) systems that are under development or deployment; and (iii) systems that are still in the initial stages of design but are supported by international working groups or bodies. More precisely, we elaborate on a taxonomy of systems that are (or will be soon) available to final users.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Mildrey Carbonell, Jose A. Onieva, Javier Lopez, Deborah Galpert, Jianying Zhou
Timeout Estimation using a Simulation Model for Non-repudiation Protocols
In: 2nd Workshop on Internet Communications Security (WICS’04), (within Computational Science and its Applications International Conference), pp. 903-914, Springer Springer, 2004.
@inproceedings{MildreyCarbonell2004,
title = {Timeout Estimation using a Simulation Model for Non-repudiation Protocols},
author = {Mildrey Carbonell and Jose A. Onieva and Javier Lopez and Deborah Galpert and Jianying Zhou},
url = {/wp-content/papers/MildreyCarbonell2004.pdf},
doi = {10.1007/978-3-540-24707-4_103},
year = {2004},
date = {2004-05-01},
urldate = {2004-05-01},
booktitle = {2nd Workshop on Internet Communications Security (WICS’04), (within Computational Science and its Applications International Conference)},
volume = {3043},
pages = {903-914},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {An essential issue for the best operation of non-repudiation protocols is to figure out their timeouts. In this paper, we propose a simulation model for this purpose since timeouts depend on specific scenario features such as network speed, TTP characteristics, number of originators and recipients, etc. Based on a one-to-many Markowicth’s protocol simulation model as a specific example, we have worked out various simulation experiments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Vicente Benjumea, Javier Lopez, Jose A. Montenegro, Jose M. Troya
A First Approach to Provide Anonymity in Attribute Certificates
In: 2004 International Workshop on Practice and Theory in Public Key Cryptography (PKC’04), pp. 402-415, Springer Springer, 2004.
@inproceedings{VicenteBenjumea2004,
title = {A First Approach to Provide Anonymity in Attribute Certificates},
author = {Vicente Benjumea and Javier Lopez and Jose A. Montenegro and Jose M. Troya},
url = {/wp-content/papers/VicenteBenjumea2004.pdf},
year = {2004},
date = {2004-03-01},
urldate = {2004-03-01},
booktitle = {2004 International Workshop on Practice and Theory in Public Key Cryptography (PKC’04)},
volume = {2947},
pages = {402-415},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {This paper focus on two security services for internet applications:authorization and anonymity. Traditional authorization solutionsare not very helpful for many of the Internet applications; however,attribute certificates proposed by ITU-T seems to be well suited andprovide adequate solution. On the other hand, special attention is paidto the fact that many of the operations and transactions that are part ofInternet applications can be easily recorded and collected. Consequently,anonymity has become a desirable feature to be added in many cases. Inthis work we propose a solution to enhance the X.509 attribute certificatein such a way that it becomes a conditionally anonymous attributecertificate. Moreover, we present a protocol to obtain such certificatesin a way that respects users’ anonymity by using a fair blind signaturescheme. We also show how to use such certificates and describe a fewcases where problems could arise, identifying some open problems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Jianying Zhou, Javier Lopez
Enhancing Certified Email Service for Timeliness and Multicast
In: Fourth International Network Conference, pp. 327-335, University of Plymouth University of Plymouth, 2004.
@inproceedings{Onieva2004b,
title = {Enhancing Certified Email Service for Timeliness and Multicast},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Onieva2004b.pdf},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
booktitle = {Fourth International Network Conference},
pages = {327-335},
publisher = {University of Plymouth},
organization = {University of Plymouth},
abstract = {Certified email is a value-added service of ordinary email, in which a sender wants to obtain a receipt from a recipient. Fair exchange protocols are a key component for certified email service to ensure fairness, i.e., the items held by two parties are exchanged without one party obtaining an advantage. We can find in the literature simple and fast optimistic protocols for fair electronic exchange and, more specifically, for certified electronic mail (CEM) and electronic contract signing (ECS). We have observed that some aspects of those protocols could be substantially improved. This paper presents two major contributions. Firstly, we provide a solution that allows both parties to end the protocol timely in an asynchronous way. Then, we extend the certified email service to the multicast scenario.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Javier Lopez, Jianying Zhou
Mejorando Servicios de Correo Electronico Certificado con Prontitud Temporal y Multicasting
In: VIII Reunión Española sobre Criptología y Seguridad de la información (RECSI’04). Avances en Criptologia y Seguridad de la Informacion, pp. 537-546, Diaz de Santos Diaz de Santos, 2004, ISBN: 84-7978-650-7.
@inproceedings{JoseA.Onieva2004d,
title = {Mejorando Servicios de Correo Electronico Certificado con Prontitud Temporal y Multicasting},
author = {Jose A. Onieva and Javier Lopez and Jianying Zhou},
url = {/wp-content/papers/JoseA.Onieva2004d.pdf},
isbn = {84-7978-650-7},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
booktitle = {VIII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la informaci\'{o}n (RECSI’04). Avances en Criptologia y Seguridad de la Informacion},
pages = {537-546},
publisher = {Diaz de Santos},
organization = {Diaz de Santos},
abstract = {El correo electr\'{o}nico certificado es un servicio a\~{n}adido al correo electr\'{o}nico est\'{a}ndar, en el cual el remitente desea obtener un recibo procedente del destinatario. Para este servicio, encontramos que los protocolos de intercambio (justo) son un componente principal para asegurar la correcci\'{o}n en la ejecuci\'{o}n de los servicios de correo electr\'{o}nico certificado, ya que los \'{i}tems que ambas partes presentan (en este caso espec\'{i}fico, el mensaje de correo y el recibo del mismo) deben ser intercambiados sin que ninguna de las partes obtenga una ventaja durante el proceso sobre la otra. Podemos encontrar en esta l\'{i}nea de investigaci\'{o}n protocolos optimistas eficientes para el intercambio electr\'{o}nico, y mas concretamente para Correo Electr\'{o}nico Certificado (CEC) y Firma Electr\'{o}nica de Contratos (FEC). Realizando un estudio adecuado hemos observado que algunos aspectos de dichos protocolos podr\'{i}an ser mejorados. En este art\'{i}culo proponemos una soluci\'{o}n que permite a ambas entidades terminar el protocolo de forma as\'{i}ncrona. Tambi\'{e}n extendemos el protocolo a m\'{u}ltiples usuarios.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jianying Zhou, Jose A. Onieva, Javier Lopez
Protecting Free Roaming Agents against Result-Truncation Attack
In: 60th IEEE Vehicular Technology Conference (VTC’04), pp. 3271-3274, IEEE Vehicular Technology Society Press IEEE Vehicular Technology Society Press, 2004.
@inproceedings{Zhou2004,
title = {Protecting Free Roaming Agents against Result-Truncation Attack},
author = {Jianying Zhou and Jose A. Onieva and Javier Lopez},
url = {/wp-content/papers/Zhou2004.pdf},
doi = {10.1109/VETECF.2004.1404668},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
booktitle = {60th IEEE Vehicular Technology Conference (VTC’04)},
pages = {3271-3274},
publisher = {IEEE Vehicular Technology Society Press},
organization = {IEEE Vehicular Technology Society Press},
abstract = {Mobile agents are especially useful in electronic commerce, for both wired and wireless environments. Nevertheless, there are still many security issues on mobile agents to be addressed, for example, data confidentiality, non-repudiability, forward privacy, publicly verifiable forward integrity, insertion defense, truncation defense, etc. One of the hardest security problems for free roaming agents is truncation defense where two visited hosts (or one revisited host) can collude to discard the partial results collected between their respective visits. We present a new scheme satisfying those security requirements, especially protecting free roaming agents against result-truncation attack.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Isaac Agudo, Javier Lopez
Specification and formal verification of security requirements
In: 5th international conference on Computer systems and technologies (CompSysTech ’04), pp. 1-6, ACM ACM, Rousse, Bulgaria, 2004, ISBN: 954-9641-38-4.
@inproceedings{Agudo2004,
title = {Specification and formal verification of security requirements},
author = {Isaac Agudo and Javier Lopez},
doi = {10.1145/1050330.1050440},
isbn = {954-9641-38-4},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
booktitle = {5th international conference on Computer systems and technologies (CompSysTech ’04)},
pages = {1-6},
publisher = {ACM},
address = {Rousse, Bulgaria},
organization = {ACM},
abstract = {With the grown of internet and distributed applications, security requirements are going inherent to the software development process. Each time one communicates with some other one there are relevant security risk that must be taken in account. This is what is happening in the new soft-ware applications using client/server architecture. We propose including security requirements at the top level of development process, together with functional requirements because they are much related. With this information we are able to extract all communication protocols that are involved in our application and their associated security goals. This is the input to a verification phase in which we look for security flaws. The last step, and the more useful (and the not yet finished) is to use this information to modify our initial specification at the top level of the development process},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Clare Dixon, Carmen Fernandez-Gago, Michael Fisher, Wiebe Hoek
Using Temporal Logics of Knowledge in the Formal Verification of Security Protocols
In: 11th International Symposium on Temporal Representation and Reasoning (TIME’04), pp. 148-151, IEEE Computer Society IEEE Computer Society, Tatihou, Normandie, France, 2004, ISSN: 1530-1311.
@inproceedings{Dix04,
title = {Using Temporal Logics of Knowledge in the Formal Verification of Security Protocols},
author = {Clare Dixon and Carmen Fernandez-Gago and Michael Fisher and Wiebe Hoek},
url = {/wp-content/papers/Dix04.pdf
http://doi.ieeecomputersociety.org/10.1109/TIME.2004.1314432},
issn = {1530-1311},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
booktitle = {11th International Symposium on Temporal Representation and Reasoning (TIME’04)},
pages = {148-151},
publisher = {IEEE Computer Society},
address = {Tatihou, Normandie, France},
organization = {IEEE Computer Society},
abstract = {Temporal logics of knowledge are useful for reasoning about situations where the knowledge of an agent or component is important, and where change in this knowledge may occur over time. Here we use temporal logics of knowledge to reason about security protocols. We show how to specify part of the Needham-Schroeder protocol using temporal logics of knowledge and prove various properties using a clausal resolution calculus for this logic.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Montenegro, Javier Lopez, Fernando Moya
Diseño e Implementación del Marco de Trabajo de Certificado de Atributos X509 para la Delegación de Privilegios
In: VIII Reunión Española sobre Criptología y Seguridad de la información (VIII RECSI), pp. 571-581, Madrid, Spain, 2004.
@inproceedings{JoseA.Montenegro2004,
title = {Dise\~{n}o e Implementaci\'{o}n del Marco de Trabajo de Certificado de Atributos X509 para la Delegaci\'{o}n de Privilegios},
author = {Jose A. Montenegro and Javier Lopez and Fernando Moya},
url = {/wp-content/papers/JoseA.Montenegro2004.pdf},
year = {2004},
date = {2004-00-01},
urldate = {2004-00-01},
booktitle = {VIII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la informaci\'{o}n (VIII RECSI)},
pages = {571-581},
address = {Madrid, Spain},
abstract = {Este trabajo muestra los detalles de una implementacion prototipo del marco de trabajo de Certificados de Atributos X.509 (Xac), propuesto por la recomendacion ITU-T. La implementacion utiliza como base de la plataforma la librer\'{i}a ́OpenSSL, que ha sido escogida por las
ventajas que presenta en relaci\'{o}n con otras librer\'{i}as. El artıculo detalla los componentes de la implementaci\'{o}n del marco de trabajo, centr\'{a}ndose en el modelo de delegaci\'{o}n especificado por la propuesta ITU-T, y tomando en consideraci\'{o}n el reciente informe emitido por ETSI sobre
Xac.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
ventajas que presenta en relación con otras librerías. El artıculo detalla los componentes de la implementación del marco de trabajo, centrándose en el modelo de delegación especificado por la propuesta ITU-T, y tomando en consideración el reciente informe emitido por ETSI sobre
Xac.
Javier Lopez, Juan J. Ortega, Jose M. Troya, Jose L. Vivas
High-level Specification of Security Systems
In: IEEE Globecom 2003 – Communications Security Track, pp. 1506-1510, IEEE Press IEEE Press, San Francisco, 2003, ISBN: 0-7803-7974-8.
@inproceedings{javierlopez2003,
title = {High-level Specification of Security Systems},
author = {Javier Lopez and Juan J. Ortega and Jose M. Troya and Jose L. Vivas},
url = {/wp-content/papers/javierlopez2003.pdf},
isbn = {0-7803-7974-8},
year = {2003},
date = {2003-12-01},
urldate = {2003-12-01},
booktitle = {IEEE Globecom 2003 - Communications Security Track},
pages = {1506-1510},
publisher = {IEEE Press},
address = {San Francisco},
organization = {IEEE Press},
abstract = {In order to study the security systems, we have developed a methodology for the application to the analysis of cryptographic protocols of the formal analysis techniques commonly used in communication protocols. In particular, we have extended the design and analysis phases with security properties. Our proposal uses a specification notation based on HMSC/MSC, which can be automatically translated into a generic SDL specification.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Juan J. Ortega, Jose M. Troya, Jose L. Vivas
How to Specify Security Services: A Practical Approach
In: 7th IFIP Conference on Multimedia and Communications Security (CMS’03), pp. 158-171, Springer-Verlag Springer-Verlag, Torino, Italy, 2003, ISBN: 3-540-20185-8.
@inproceedings{javierlopez2003a,
title = {How to Specify Security Services: A Practical Approach},
author = {Javier Lopez and Juan J. Ortega and Jose M. Troya and Jose L. Vivas},
url = {/wp-content/papers/javierlopez2003a.pdf},
isbn = {3-540-20185-8},
year = {2003},
date = {2003-10-01},
urldate = {2003-10-01},
booktitle = {7th IFIP Conference on Multimedia and Communications Security (CMS’03)},
volume = {2828},
pages = {158-171},
publisher = {Springer-Verlag},
address = {Torino, Italy},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {Security services are essential for ensuring secure communications. Typically no consideration is given to security requirements during the initial stages of system development. Security is only added latter as an afterthought in function of other factors such as the environment into which the system is to be inserted, legal requirements, and other kinds of constraints. In this work we introduce a methodology for the specification of security requirements intended to assist developers in the design, analysis, and implementation phases of protocol development. The methodology consists of an extension of the ITU-T standard requirements language MSC and HMSC, called SRSL, defined as a high level language for the specification of security protocols. In order to illustrate it and evaluate its power, we apply the new methodology to a real world example, the integration of an electronic notary system into a web-based multi-users service platform.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Jianying Zhou, Javier Lopez
Practical Service Charge for P2P Content Distribution
In: Fifth International Conference on Information and Communications Security, pp. 112 – 123, Springer Springer, 2003.
@inproceedings{Onieva2003a,
title = {Practical Service Charge for P2P Content Distribution},
author = {Jose A. Onieva and Jianying Zhou and Javier Lopez},
url = {/wp-content/papers/Onieva2003a.pdf},
doi = {10.1007/978-3-540-39927-8_11},
year = {2003},
date = {2003-10-01},
urldate = {2003-10-01},
booktitle = {Fifth International Conference on Information and Communications Security},
volume = {2836},
pages = {112 - 123},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {With emerging decentralized technologies, peer-to-peer (P2P) content distribution arises as a new model for storage and transmission of data. In this scenario, one peer can be playing different roles, either as a distributor or as a receiver of digital contents. In order to incentivize the legal distribution of these contents and prevent the network from free riders, we propose a charging model where distributors become merchants and receivers become customers. To help in the advertisement of digital contents and collection of payment details, an intermediary agent is introduced. An underlying P2P payment protocol presented in [1] is applied to this scenario without total trust on the intermediary agent.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose L. Vivas, Jose A. Montenegro, Javier Lopez
Towards Business Process-Driven Framework for Security Engineering with the UML
In: 6th International Conference on Information Security (ISC’03), pp. 381-395, Springer-Verlag Springer-Verlag, Bristol, U.K., 2003, ISBN: 1-4020-7449-2.
@inproceedings{josevivas2003,
title = {Towards Business Process-Driven Framework for Security Engineering with the UML},
author = {Jose L. Vivas and Jose A. Montenegro and Javier Lopez},
url = {/wp-content/papers/josevivas2003.pdf},
isbn = {1-4020-7449-2},
year = {2003},
date = {2003-10-01},
urldate = {2003-10-01},
booktitle = {6th International Conference on Information Security (ISC’03)},
volume = {2851},
pages = {381-395},
publisher = {Springer-Verlag},
address = {Bristol, U.K.},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {A challenging task in security engineering concerns the specification and integration of security with other requirements at the top level of requirements engineering. Empirical studies show that it is commonly at the business process level that customers and end users are able to express their security needs. In addition, systems are often developed by automating existing manual business processes. Since many security notions belongs conceptually to the world of business processes, it is natural to try to capture and express them in the context of business models in which moreover customers and end users feel most comfortable. In this paper, based on experience drawn from an ongoing work within the CASENET project citeCASENET, we propose a UML-based business process-driven framework for the development of security-critical systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Juan J. Ortega, Jose M. Troya
Applying SDL to Formal Analysis of Security Systems
In: 11th International SDL Forum (SDL’03), pp. 300-317, Springer-Verlag Springer-Verlag, Stuttgart, Germany, 2003.
@inproceedings{JavierLopez2003b,
title = {Applying SDL to Formal Analysis of Security Systems},
author = {Javier Lopez and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2003b.pdf},
year = {2003},
date = {2003-07-01},
urldate = {2003-07-01},
booktitle = {11th International SDL Forum (SDL’03)},
volume = {2708},
pages = {300-317},
publisher = {Springer-Verlag},
address = {Stuttgart, Germany},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {Nowadays, it is widely accepted that critical systems have to be formally analysed in order to achieve well-known formal method benefits. In order to study the security of communication systems, we have developed a methodology for the application of the formal analysis techniques commonly used in communication protocols to the analysis of cryptographic ones. In particular, we have extended the design and analysis phases with security properties. Our proposal uses a specification notation based on MSC, which can be automatically translated into a generic SDL specification. This SDL system can then be used for the analysis of the desired security properties, by using an observer process schema. Apart from our main goal of providing a notation for describing the formal specification of security systems, our proposal also brings additional benefits, such as the study of the possible attacks to the system, and the possibility of re-using the specifications produced to describe and analyse more complex systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Jianying Zhou, Mildrey Carbonell, Javier Lopez
Intermediary Non-Repudiation Protocols
In: 5th Conference on Electronic Commerce, pp. 207-214, IEEE Computer Society IEEE Computer Society, 2003.
@inproceedings{Onieva2003b,
title = {Intermediary Non-Repudiation Protocols},
author = {Jose A. Onieva and Jianying Zhou and Mildrey Carbonell and Javier Lopez},
url = {/wp-content/papers/Onieva2003b.pdf},
doi = {10.1109/COEC.2003.1210251},
year = {2003},
date = {2003-06-01},
urldate = {2003-06-01},
booktitle = {5th Conference on Electronic Commerce},
pages = {207-214},
publisher = {IEEE Computer Society},
organization = {IEEE Computer Society},
abstract = {In commercial transactions, an intermediary might be involved to help transacting parties to conduct their business. Nevertheless, the intermediary may not be fully trusted. In this paper, we introduce the concept of intermediary (or agent) in a non-repudiation protocol, define the aims of intermediary non-repudiation protocols, and analyze their security requirements. We present a simple scenario with only one recipient, followed by a more complicated framework where multiple recipients are involved and collusion between them is possible.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jose A. Onieva, Jianying Zhou, Mildrey Carbonell, Javier Lopez
A Multi-Party Non-Repudiation Protocol for Exchange of Different Messages
In: 18th IFIP International Information Security Conference. Security and Privacy in the Age of Uncertainty (IFIP SEC’03), pp. 37-48, IFIP IFIP, 2003.
@inproceedings{Onieva2003,
title = {A Multi-Party Non-Repudiation Protocol for Exchange of Different Messages},
author = {Jose A. Onieva and Jianying Zhou and Mildrey Carbonell and Javier Lopez},
url = {/wp-content/papers/Onieva2003.pdf},
doi = {10.1007/978-0-387-35691-4_4},
year = {2003},
date = {2003-05-01},
urldate = {2003-05-01},
booktitle = {18th IFIP International Information Security Conference. Security and Privacy in the Age of Uncertainty (IFIP SEC’03)},
pages = {37-48},
publisher = {IFIP},
organization = {IFIP},
abstract = {Non-repudiation is a security service that provides cryptographic evidence to support the settlement of disputes. In this paper, we introduce the state-of-the-art of multi-party non-repudiation protocols, and analyze the previous work where one originator is able to send the same message to many recipients. We propose a new multi-party non-repudiation protocol for sending different messages to many recipients. We also discuss the improvements achieved with respect to the multiple instances of a two-party non-repudiation protocol, and present some applications that would benefit from them.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Antonio Mana, Jose M. Troya, Mariemma I. Yague
Applying the Semantic Web Layers to Access Control
In: IEEE International Workshop on Web Semantics (WebS’03), pp. 622-626, IEEE Press IEEE Press, 2003, ISBN: 0-7695-1993-8.
BibTeX | Links:
@inproceedings{1719,
title = {Applying the Semantic Web Layers to Access Control},
author = {Javier Lopez and Antonio Mana and Jose M. Troya and Mariemma I. Yague},
url = {/wp-content/papers/1719.pdf},
isbn = {0-7695-1993-8},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
booktitle = {IEEE International Workshop on Web Semantics (WebS’03)},
pages = {622-626},
publisher = {IEEE Press},
organization = {IEEE Press},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Ed Dawson, Javier Lopez, Jose A. Montenegro, Eiji Okamoto
BAAI: Biometric Authentication and Authorization Infrastructure
In: IEEE International Conference on Information Technology (ITRE’03), pp. 274-278, IEEE IEEE, 2003, ISBN: 0780377249.
@inproceedings{EdDawson2003,
title = {BAAI: Biometric Authentication and Authorization Infrastructure},
author = {Ed Dawson and Javier Lopez and Jose A. Montenegro and Eiji Okamoto},
doi = {10.1109/ITRE.2003.1270620},
isbn = {0780377249},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
booktitle = {IEEE International Conference on Information Technology (ITRE’03)},
pages = {274-278},
publisher = {IEEE},
organization = {IEEE},
abstract = {The combined use of authorization and authentication infrastructures has led to AAIs (authorization and authentication infrastructures). These new infrastructures supply identification and authorization services to a distributed environment There are many possibilities of linkages to get AAIs; one of them is to include the PMI (privilege management infrastructure) as authorization infrastructure and an authentication infrastructure that can be a PKI (public key infrastructure) or kerberos. This symbiosis gives service to applications and servers. However, in physical environments where the physical presence of an individual is required, it is necessary to use biometric systems. This paper describes the development of a solution that combines the relationship between the biometric based systems and the PMIs to finally obtain the biometric AAI.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Eiji Okamoto, Javier Lopez, Ed Dawson, Juan M. Gonzalez-Nieto, Selwyn Russell, Jason Smith
Certificate Retrieval and Validation in Online Systems
In: Symposium on Cryptography and Information Security (SCIS’03), pp. 25-30, Hamamatsu, Japan, 2003.
@inproceedings{EijiOkamoto2003,
title = {Certificate Retrieval and Validation in Online Systems},
author = {Eiji Okamoto and Javier Lopez and Ed Dawson and Juan M. Gonzalez-Nieto and Selwyn Russell and Jason Smith},
url = {/wp-content/papers/EijiOkamoto2003.pdf},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
booktitle = {Symposium on Cryptography and Information Security (SCIS’03)},
pages = {25-30},
address = {Hamamatsu, Japan},
abstract = {In order to more effectively deal with certificate management issues in PKIs, there is growing interest in supplementing offline X.509 PKI models with online services. An analysis of the security requirements of online models will be presented. Proposed online and delegated processing models will be evaluated in relation to these requirements.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jose A. Montenegro, Javier Lopez
Taxonomía de las Infraestructuras de Autorización y Autentificación
In: XIII Jornadas TELECOM I+D 2003, 2003.
@inproceedings{JoseA.Montenegro2003,
title = {Taxonom\'{i}a de las Infraestructuras de Autorizaci\'{o}n y Autentificaci\'{o}n},
author = {Jose A. Montenegro and Javier Lopez},
year = {2003},
date = {2003-00-01},
urldate = {2003-00-01},
booktitle = {XIII Jornadas TELECOM I+D 2003},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Antonio Mana, Ernesto Pimentel, Jose M. Troya, Mariemma I. Yague
Access Control Infrastructure for Digital Objects
In: International Conference on Information and Communications Security (ICICS’02), pp. 399-410, Springer-Verlag Springer-Verlag, Singapore, 2002.
@inproceedings{JavierLopez2002j,
title = {Access Control Infrastructure for Digital Objects},
author = {Javier Lopez and Antonio Mana and Ernesto Pimentel and Jose M. Troya and Mariemma I. Yague},
url = {/wp-content/papers/JavierLopez2002j.pdf},
year = {2002},
date = {2002-12-01},
urldate = {2002-12-01},
booktitle = {International Conference on Information and Communications Security (ICICS’02)},
volume = {2513},
pages = {399-410},
publisher = {Springer-Verlag},
address = {Singapore},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {Distributed systems usually contain objects with heterogeneous security requirements that pose important challenges on the underlying security mechanisms and especially in access control systems. Access control in distributed systems often relies on centralized security administration. Existing solutions for distributed access control do not provide the flexibility and manageability required. This paper presents the XML-based Secure Content Distribution (XSCD) infrastructure is based on the production of self-protected software objects that convey contents (software or data) and can be distributed without further security measures because they embed the access control enforcement mechanism. It also provides means for integrating Privilege Management Infrastructures (PMIs). Semantic information is used in the dynamic instantiation and semantic validation of policies. XSCD is scalable, facilitates the administration of the access control system, guarantees the secure distribution of the contents, enables semantic integration and interoperability of heterogeneous sources, solves the “originator retained control” issue and allows activities (such as payment) to be bound to the access to objects.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Jose A. Montenegro, Rodrigo Roman, Jorge Davila
Design of a VPN Software Solution Integrating TCP and UDP Services
In: International Conference on Infrastructure Security (InfraSec’02), pp. 325-337, Springer-Verlag Springer-Verlag, Bristol, U.K., 2002.
@inproceedings{JavierLopez2002c,
title = {Design of a VPN Software Solution Integrating TCP and UDP Services},
author = {Javier Lopez and Jose A. Montenegro and Rodrigo Roman and Jorge Davila},
url = {/wp-content/papers/JavierLopez2002c.pdf},
year = {2002},
date = {2002-10-01},
urldate = {2002-10-01},
booktitle = {International Conference on Infrastructure Security (InfraSec’02)},
volume = {2437},
pages = {325-337},
publisher = {Springer-Verlag},
address = {Bristol, U.K.},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {The main aims of Virtual Private Network (VPN) are to isolate a distributed network from outsiders, as well as to protect the confidentiality and integrity of sensitive information traversing a non-trusted network such as the Internet. However, some problems arise when security is considered as the unique problem because VPN users suffer from restrictions in their access to the network. They are not free to use traditional Internet services such as electronic mail exchange with non-VPN users, and to access Web and FTP servers external to the organization. This paper presents a new solution that allows the open use of traditional network services running over TCP and UDP layers, while maintaining strong security features. The new scheme works at the TCP/IP transport layer and does not require the addition of new hardware because it is a totally software solution. As a consequence, the application is totally portable. Moreover, and because of its implementation at the transport layer, there is no need to modify any traditional communication applications previously installed in the network system.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Juan J. Ortega, Jose M. Troya
Protocol Engineering Applied to Formal Analysis of Security Systems
In: International Conference on Infrastructure Security (InfraSec’02), pp. 246-259, Springer-Verlag Springer-Verlag, Bristol, U.K., 2002.
@inproceedings{JavierLopez2002b,
title = {Protocol Engineering Applied to Formal Analysis of Security Systems},
author = {Javier Lopez and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002b.pdf},
year = {2002},
date = {2002-10-01},
urldate = {2002-10-01},
booktitle = {International Conference on Infrastructure Security (InfraSec’02)},
volume = {2437},
pages = {246-259},
publisher = {Springer-Verlag},
address = {Bristol, U.K.},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {Every communication system requiring security properties is certainly critical. In order to study the security of communication systems, we have developed a methodology for the application of the formal analysis techniques of communication protocols to the analysis of cryptographic ones. We have extended the design and analysis phases with security properties. Our methodology uses a specification technique based on the HMSC/MSC requirement languages, and translates it into a generic schema for the SDL specification language, which is used for the analysis. Thus, the technique allows the specification of security protocols using a standard formal language and uses Object-Orientation for reusability purposes. The final goal is not only the formal specification of a security system, but to examine the possible attacks, and later use the specification in more complex systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
William Caelli, Kevin Chen, Ed Dawson, Matthew Henricksen, Javier Lopez, Eiji Okamoto, Selwyn Russell, Jason Smith
Online Public Key Infrastructure
In: VII Reunión Española sobre Criptología y Seguridad de la Información (VII RECSI), pp. 123-135, Oviedo (Spain), 2002, ISBN: 84-699-8930-8.
@inproceedings{1736,
title = {Online Public Key Infrastructure},
author = {William Caelli and Kevin Chen and Ed Dawson and Matthew Henricksen and Javier Lopez and Eiji Okamoto and Selwyn Russell and Jason Smith},
isbn = {84-699-8930-8},
year = {2002},
date = {2002-09-01},
urldate = {2002-09-01},
booktitle = {VII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (VII RECSI)},
pages = {123-135},
address = {Oviedo (Spain)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Jose A. Montenegro, Juan J. Ortega, Jose M. Troya
Towards a Trustful and Flexible Environment for Secure Communications with Public Administrations
In: First International Conference on Electronic Government (EGOV’02), pp. 211-214, Springer Springer, Aix-en-Provence, France, 2002.
@inproceedings{JavierLopez2002g,
title = {Towards a Trustful and Flexible Environment for Secure Communications with Public Administrations},
author = {Javier Lopez and Antonio Mana and Jose A. Montenegro and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002g.pdf},
year = {2002},
date = {2002-09-01},
urldate = {2002-09-01},
booktitle = {First International Conference on Electronic Government (EGOV’02)},
volume = {2456},
pages = {211-214},
publisher = {Springer},
address = {Aix-en-Provence, France},
organization = {Springer},
series = {LNCS},
abstract = {Interaction of citizens and private organizations with Public Administrations can produce meaningful benefits in the accessibility, efficiency and availability of documents, regardless of time, location and quantity. Although there are some experiences in the field of e-government there are still some technological and legal difficulties that avoid a higher rate of communications with Public Administrations through Internet, not only from citizens, but also from private companies. We have studied two of the technological problems, the need to work in a trustful environment and the creation of tools to manage electronic versions of the paper-based forms.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Mariemma I. Yague
XML-Based Distributed Access Control System
In: Third International Conference on E-Commerce and Web Technologies (ECWeb’02), pp. 203-213, Springer Springer, 2002.
@inproceedings{JavierLopez2002e,
title = {XML-Based Distributed Access Control System},
author = {Javier Lopez and Antonio Mana and Mariemma I. Yague},
url = {/wp-content/papers/JavierLopez2002e.pdf},
year = {2002},
date = {2002-09-01},
urldate = {2002-09-01},
booktitle = {Third International Conference on E-Commerce and Web Technologies (ECWeb’02)},
volume = {2455},
pages = {203-213},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {The use of attribute certificates and the concept of mobile policies have been proposed to overcome some of the limitations of the role based access control (RBAC) paradigm and to implement security requirements such as the ‘‘originator controlled’’ (ORCON) policy. Mobile policies are attached to the data that they control and enforced by their execution in trusted servers. In this paper we extend this idea to allow the execution of the policies in untrusted systems. Our extension allows that policies are bound to the data but not attached to it. By this modification security administrators are able to change policies dynamically and transparently. Additionally, we introduce X-ACS, an XML-based language designed to express policies in a simple and unambiguous way overcoming the limitations of other approaches. Important features of X-ACS are that it can be used by processors with limited capabilities such as smart cards while allowing the automated validation of policies.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Carmen Fernandez-Gago, Michael Fisher, Clare Dixon
Algorithms for Guiding Clausal Temporal Resolution
In: 25th Conference on Artificial Intelligence (KI’02), pp. 235-249, Springer Springer, Aachen, Germany, 2002.
@inproceedings{Fernandez02,
title = {Algorithms for Guiding Clausal Temporal Resolution},
author = {Carmen Fernandez-Gago and Michael Fisher and Clare Dixon},
url = {/wp-content/papers/Fernandez02.pdf},
year = {2002},
date = {2002-09-01},
urldate = {2002-09-01},
booktitle = {25th Conference on Artificial Intelligence (KI’02)},
volume = {2479},
pages = {235-249},
publisher = {Springer},
address = {Aachen, Germany},
organization = {Springer},
series = {LNAI},
abstract = {Clausal temporal resolution is characterised by a translation of the formulae whose satisfiability is to be established to a normal form, step resolution (similar to classical resolution) on formulae occurring at the same states and temporal resolution between formulae describing properties over a longer period. The most complex part of the method occurs in searching for candidates for the temporal resolution operation, something that may need to be carried out several times. In this paper we consider a new technique for finding the candidates for the temporal resolution operation. Although related to the previously developed external search procedure, this new approach not only allows the temporal resolution operation to be carried out at any moment, but also simplifies any subsequent search required for similar temporal formulae. Finally, in contrast with previous approaches, this search can be seen as an inherent part of the resolution process, rather than an external procedure that is only called in certain situations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Ed Dawson, Javier Lopez, Jose A. Montenegro, Eiji Okamoto
A New Design of Privilege Management Infrastructure (PMIs) for Organizations Using Outsourced PKI
In: 5th International Conference on Information Security (ISC’02), pp. 136-149, Springer-Verlag Springer-Verlag, 2002, ISBN: 3540442707.
@inproceedings{EdDawson2002,
title = {A New Design of Privilege Management Infrastructure (PMIs) for Organizations Using Outsourced PKI},
author = {Ed Dawson and Javier Lopez and Jose A. Montenegro and Eiji Okamoto},
doi = {10.1007/3-540-45811-5_10},
isbn = {3540442707},
year = {2002},
date = {2002-09-01},
urldate = {2002-09-01},
booktitle = {5th International Conference on Information Security (ISC’02)},
volume = {2433},
pages = {136-149},
publisher = {Springer-Verlag},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {Authentication services provided by Public Key Infrastructures (PKI) do not satisfy the needs of many e-commerce applications. These applications require additional use of authorization services in order for users to prove what they are allowed to do. Attribute certificates have changed the way in which the authorization problem has been considered until now, and Privilege Management Infrastructures (PMI) provide the necessary support for a wide use of those certificates. Although both types of infrastructures, PKIs and PMIs, keep some kind of relation, they can operate autonomously. This fact is specially interesting for companies who have taken or will take the decision to outsource PKI services. However, outsourcing PMI services is not a good option for many companies because sometimes information contained in attribute certificates is confidential. Therefore attribute certificates must be managed very carefully and, preferably, only inside the company. In this paper we present a new design of PMI that is specially suited for those companies that outsource PKI services but still need to manage the PMI internally. The scheme provides additional advantages that satisfy the needs of intra-company attribute certification, and eliminates some of the problems associated with the revocation procedures.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Juan J. Ortega, Jose M. Troya
Verification of Authentication Protocols using SDL-method
In: First International Workshop on Security in Information Systems (SIS’02), pp. 61-71, Ciudad Real, Spain, 2002.
@inproceedings{JavierLopez2002a,
title = {Verification of Authentication Protocols using SDL-method},
author = {Javier Lopez and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002a.pdf},
year = {2002},
date = {2002-04-01},
urldate = {2002-04-01},
booktitle = {First International Workshop on Security in Information Systems (SIS’02)},
pages = {61-71},
address = {Ciudad Real, Spain},
abstract = {Authentication between protocol agents is widely studied in the cryptographic protocol analysis area. It is essential in a virtual environment to rely on protocol parties’ identity. In the academic literature there are many protocols that provide the authentication property. We present in this paper a new mechanism to verify authentication using SDL, general purpose specification language. We have defined a generic schema in SDL that allow us to specify a security system and check system behavior when a malicious agent ( the intruder ) is present. We have used the EKE authentication protocol to illustrate how the mechanism works.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Selwyn Russell, Eiji Okamoto, Ed Dawson, Javier Lopez
Improving Performance in Global PKI using Virtual Certificates and Synthetic Certificates
In: Symposium on Cryptography and Information Security (SCIS’02), pp. 1149-1154, 2002.
@inproceedings{SelwynRussell2002,
title = {Improving Performance in Global PKI using Virtual Certificates and Synthetic Certificates},
author = {Selwyn Russell and Eiji Okamoto and Ed Dawson and Javier Lopez},
url = {/wp-content/papers/SelwynRussell2002.pdf},
year = {2002},
date = {2002-01-01},
urldate = {2002-01-01},
booktitle = {Symposium on Cryptography and Information Security (SCIS’02)},
pages = {1149-1154},
abstract = {A digital certificate may be used to inform the world of the public key of its owner. To guard against impersonations and fraud, the receiver needs to perform a series of checks. When a hierarchy of certificates is involved, and when there are large volumes of messages between two parties, as is frequent in commerce, the repeated validation of the same chain of certificates consume significant resources. This paper presents new concepts of virtual certificate and synthetic certificate which can be used to speed up repetitive processing of a chain with improved efficiency.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Jose A. Montenegro, Jose M. Troya
Perspectiva Composicional para el Diseño y la Implementación de una PKI
In: I Congreso Internacional Sociedad de la Información, pp. 423-428, Las Palmas, España, 2002.
@inproceedings{JavierLopez2002i,
title = {Perspectiva Composicional para el Dise\~{n}o y la Implementaci\'{o}n de una PKI},
author = {Javier Lopez and Jose A. Montenegro and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002i.pdf},
year = {2002},
date = {2002-01-01},
urldate = {2002-01-01},
booktitle = {I Congreso Internacional Sociedad de la Informaci\'{o}n},
pages = {423-428},
address = {Las Palmas, Espa\~{n}a},
abstract = {The important role of Public Key Infrastructures (PKIs) inside the general scope of Internet communication, and more precisely, inside electronic commerce, has driven us to the revision of actual procedures followed in the development of software of these elements that provide security and trust to the digital certification environment. In this work we introduce the actual results of a joint research project of the Security Group of the University of Malaga and the Department of Technology Innovation of Banesto regarding a PKI implementation. The originality of this work is that we have paid attention not only to functional aspects of the infrastructure, but also to the programming techniques used. Basically, we have developed a solution in which implementation has been guided by the increase in the study of software architectures and those paradigms that have emerged in parallel, as component orientation, software frameworks, and design patterns. The correct use of these techniques provide a different point of view that allows the development of every PKI building block in a modular and independent way.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Jose A. Montenegro, Juan J. Ortega, Jose M. Troya
Designing Software Tools for the Use of Secure Electronic Forms
In: 3rd ACIS Int. Conf. on Software Engineering, Artificial Intelligence Networking and Parallel/Distributed Computing (SNPD’02), pp. 157-163, Madrid, Spain, 2002.
@inproceedings{JavierLopez2002f,
title = {Designing Software Tools for the Use of Secure Electronic Forms},
author = {Javier Lopez and Antonio Mana and Jose A. Montenegro and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002f.pdf},
year = {2002},
date = {2002-00-01},
urldate = {2002-00-01},
booktitle = {3rd ACIS Int. Conf. on Software Engineering, Artificial Intelligence Networking and Parallel/Distributed Computing (SNPD’02)},
pages = {157-163},
address = {Madrid, Spain},
abstract = {Interaction of organizations and their clients by using the Internet can produce meaningful benefits in the accessibility, efficiency and availability of documents, regardless of time and location. However, some types of problems hinder a higher degree of communication. This paper presents some of the results of a Research Project that focuses on the influence of typical open networks risks in electronic interactions and on the need of creating software tools to manage electronic versions of the paper-based forms, as this is the traditional way of interaction through the Web.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Sonia Matamoros, Juan J. Ortega, Jose M. Troya
Observaciones sobre las técnicas de análisis formal de protocolos de seguridad
In: VII Reunión Española sobre Criptología y Seguridad de la Información (VII RECSI), pp. 471-483, Oviedo, España, 2002.
@inproceedings{JavierLopez2002h,
title = {Observaciones sobre las t\'{e}cnicas de an\'{a}lisis formal de protocolos de seguridad},
author = {Javier Lopez and Sonia Matamoros and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2002h.pdf},
year = {2002},
date = {2002-00-01},
urldate = {2002-00-01},
booktitle = {VII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (VII RECSI)},
pages = {471-483},
address = {Oviedo, Espa\~{n}a},
abstract = {La aplicaci\'{o}n de los m\'{e}todos formales para el dise\~{n}o y an\'{a}lisis de sistemas cr\'{i}ticos est\'{a} ampliamente aceptada en el desarrollo de estos sistemas. Los protocolos de seguridad abordan el objetivo de garantizar servicios y derechos como el de la confidencialidad de los datos personales o el de garantizar la identidad de acceso a un sistema. Por lo tanto, ya que un protocolo de seguridad es un sistema cr\'{i}tico, es necesario utilizar m\'{e}todosformales para su dise\~{n}o y an\'{a}lisis. Debido a las caracter\'{i}sticas especiales que presentan este tipo de protocolos, se deben utilizar m\'{e}todos que no son los tradicionales utilizados para los protocolos de comunicaciones, sino que deben utilizarse otros espec\'{i}ficos. En este art\'{i}culo vamos a hacer un estudio de las principales propiedades de seguridad que poseen los protocolos criptogr\'{a}ficos y de la manera de aplicar los m\'{e}todos formales en su dise\~{n}o y an\'{a}lisis.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Antonio Mana, Juan J. Ortega, Ernesto Pimentel
Protección de Software basada en Tarjetas Inteligentes
In: VII Reunión Española sobre Criptología y Seguridad de la Información (VII RECSI), pp. 485-497, Oviedo, España, 2002.
@inproceedings{JavierLopez2002,
title = {Protecci\'{o}n de Software basada en Tarjetas Inteligentes},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega and Ernesto Pimentel},
year = {2002},
date = {2002-00-01},
urldate = {2002-00-01},
booktitle = {VII Reuni\'{o}n Espa\~{n}ola sobre Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (VII RECSI)},
pages = {485-497},
address = {Oviedo, Espa\~{n}a},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Sigrid Gurgens, Javier Lopez
Suitability of a Classical Analysis Method for E-Commerce Protocols
In: IV International Information Security Conference (ISC’01), pp. 46-62, Springer-Verlag Springer-Verlag, Malaga, Spain, 2001.
@inproceedings{SigridGuergens2001,
title = {Suitability of a Classical Analysis Method for E-Commerce Protocols},
author = {Sigrid Gurgens and Javier Lopez},
url = {/wp-content/papers/SigridGuergens2001.pdf},
year = {2001},
date = {2001-10-01},
urldate = {2001-10-01},
booktitle = {IV International Information Security Conference (ISC’01)},
volume = {2200},
pages = {46-62},
publisher = {Springer-Verlag},
address = {Malaga, Spain},
organization = {Springer-Verlag},
series = {LNCS},
abstract = {We present the adaptation of our model for the validation ofkey distribution and authentication protocols to address speci c needsof protocols for electronic commerce. The two models defer in both thethreat scenario and in the formalization. We demonstrate the suitabilityof our adaptation by analyzing a speci c version of the Internet BillingServer protocol introduced by Carnegie Mellon University. Our analysisshows that, while the security properties a key distribution or authenticationprotocol shall provide are well understood, it is often not clearwhat properties an electronic commerce protocol can or shall provide.Our methods rely on automatic theorem proving tools. Speci cally, weused \Otter", an automatic theorem proving software developed at ArgonneNational Laboratories.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Carmen Fernandez-Gago, Michael Fisher, Clare Dixon
An Algorithm for Guiding Clausal Temporal Resolution
In: 4th International Workshop on Strategies in Automated Deduction (STRATEGIES’01), Siena, Italy, 2001.
@inproceedings{Fernandez01,
title = {An Algorithm for Guiding Clausal Temporal Resolution},
author = {Carmen Fernandez-Gago and Michael Fisher and Clare Dixon},
url = {/wp-content/papers/Fernandez01.pdf},
year = {2001},
date = {2001-06-01},
urldate = {2001-06-01},
booktitle = {4th International Workshop on Strategies in Automated Deduction (STRATEGIES’01)},
address = {Siena, Italy},
abstract = {The clausal resolution method developed for discrete temporal log- ics involves translation to a normal form, classical resolution on formulae within states (termed step resolution) and temporal resolution between states. Step res- olution may generate an unnecessarily large set of clauses. In addition, the most expensive part of the method is the application of the temporal resolution oper- ation. In this paper we develop an algorithm to guide the search for the set of clauses needed for the application of temporal resolution. The algorithm is based on the outputs of a refined temporal resolution rule which allows us to generate temporal resolvents earlier within the process. In particular, this can also help us to avoid unnecessary step resolution and focus search for the most relevant clauses.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jorge Davila, Javier Lopez, Rene Peralta, Jose M. Troya
A First Approach to Latin Electronic Notary Public Services
In: IFIP Conference on Security & Control of IT in Security, pp. 49-60, 2001.
@inproceedings{1720,
title = {A First Approach to Latin Electronic Notary Public Services},
author = {Jorge Davila and Javier Lopez and Rene Peralta and Jose M. Troya},
year = {2001},
date = {2001-01-01},
urldate = {2001-01-01},
booktitle = {IFIP Conference on Security \& Control of IT in Security},
pages = {49-60},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Areitio, Lorenzo Martínez, Javier Lopez, Jose A. Montenegro
Análisis, Diseño e Implementación de un Entorno Escalable de Comercio-e con Seguridad Telemática Adaptable Basada en PKI
In: I Simposio Español de Comercio Electrónico (SEC’01), pp. 145-160, Málaga, España, 2001.
@inproceedings{JavierAreitio2001,
title = {An\'{a}lisis, Dise\~{n}o e Implementaci\'{o}n de un Entorno Escalable de Comercio-e con Seguridad Telem\'{a}tica Adaptable Basada en PKI},
author = {Javier Areitio and Lorenzo Mart\'{i}nez and Javier Lopez and Jose A. Montenegro},
year = {2001},
date = {2001-00-01},
urldate = {2001-00-01},
booktitle = {I Simposio Espa\~{n}ol de Comercio Electr\'{o}nico (SEC’01)},
pages = {145-160},
address = {M\'{a}laga, Espa\~{n}a},
abstract = {La presente ponencia aborda el desarrollo de un entorno seguro escalable para el Comercio Electr\'{o}nico. Se ha tratado la cuesti\'{o}n en dos fases: primero, idear un prototipo generalizado distribuido seguro formado por diferentes entidades gen\'{e}ricas con el objetivo de permitir que los clientes realicen sus compras y transacciones bancarias con un nivel de seguridad escalable; y en segundo lugar, implantar en la pr\'{a}ctica un prototipo de grado de escalabilidad reducido como modelo emp\'{i}rico.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jorge Davila, Javier Lopez, Rodrigo Roman
Introducción de Aplicaciones UDP en Redes Privadas Virtuales
In: III Jornadas de Ingeniería Telemática (JITEL’01), pp. 397-404, Barcelona (Spain), 2001.
@inproceedings{JorgeDavila2001,
title = {Introducci\'{o}n de Aplicaciones UDP en Redes Privadas Virtuales},
author = {Jorge Davila and Javier Lopez and Rodrigo Roman},
url = {/wp-content/papers/JorgeDavila2001.pdf},
year = {2001},
date = {2001-00-01},
urldate = {2001-00-01},
booktitle = {III Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’01)},
pages = {397-404},
address = {Barcelona (Spain)},
abstract = {Virtual Private Network (VPN) solutions mainly focus on security aspects. However, when security is considered the unique problem, some collateral ones arise. VPN users suffer from restrictions in their access to the network. They are not free to use traditional Internet services such as electronic mail exchange and audio/video conference with non-VPN users, and to access Web and Ftp servers external to the organization. In this paper we present a new solution, located at the TCP/IP transport layer and oriented to UDP applications that, while maintaining strong security features, allows the open use of traditional network services. The solution does not require the addition of new hardware because it is an exclusively software solution. As a consequence, the application is totally portable.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Antonio Mana, Javier Lopez, Jesus Martinez, Sonia Matamoros
Ticketing Genérico y Seguro Sobre GSM
In: Simposio en Informática y Telecomunicaciones 2001 (SIT’01), pp. 297-305, La Coruña, España, 2001.
@inproceedings{AntonioMana2001,
title = {Ticketing Gen\'{e}rico y Seguro Sobre GSM},
author = {Antonio Mana and Javier Lopez and Jesus Martinez and Sonia Matamoros},
year = {2001},
date = {2001-00-01},
urldate = {2001-00-01},
booktitle = {Simposio en Inform\'{a}tica y Telecomunicaciones 2001 (SIT’01)},
pages = {297-305},
address = {La Coru\~{n}a, Espa\~{n}a},
abstract = {La confianza en el comercio electr\'{o}nico se ha reforzado, sin duda, gracias a la difusi\'{o}n de las tarjetas inteligentes. Estos elementos clave, que mejoran en gran medida la seguridad de los sistemas inform\'{a}ticos, tienen usos que van desde la simple identificaci\'{o}n del usuario hasta complejos mecanismos de pago. Dentro del comercio electr\'{o}nico, uno de los servicios de valor a\~{n}adido m\'{a}s interesantes para cualquier usuario es el de ticketing. La seguridad de este sistema puede beneficiarse del uso de las tarjetas inteligentes en los procesos de venta, almacenamiento y uso de los tickets electr\'{o}nicos. Uno de los puntos cr\'{i}ticos para conseguir una amplia aceptaci\'{o}n de este servicio ser\'{a} su capacidad de llegar a la gran mayor\'{i}a de usuarios. En esta l\'{i}nea, parece apropiado pensar en los tel\'{e}fonos m\'{o}viles como la mejor plataforma sobre la que implantar el sistema. Este trabajo presenta los resultados del proyecto GSM-ticket, en el que se introducen, por una parte, un esquema de tickets electr\'{o}nicos seguros, eficientes y f\'{a}ciles de usar, y por otra el conjunto de servicios adicionales de venta, pago y distribuci\'{o}n junto con sus protocolos correspondientes.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Juan J. Ortega, Jose M. Troya
Distributed Storage and Revocation in Digital Certificate Databases
In: 11th International Conference on Database and Expert Systems Applications (DEXA’00), pp. 929-938, Springer Springer, London, U.K., 2000.
@inproceedings{JavierLopez2000a,
title = {Distributed Storage and Revocation in Digital Certificate Databases},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2000a.pdf},
year = {2000},
date = {2000-09-01},
urldate = {2000-09-01},
booktitle = {11th International Conference on Database and Expert Systems Applications (DEXA’00)},
volume = {1873},
pages = {929-938},
publisher = {Springer},
address = {London, U.K.},
organization = {Springer},
series = {LNCS},
abstract = {Public-key cryptography is fast becoming the foundation for those applications that require security and authentication in open networks. But the widespread use of a global public-key cryptosystem requires that public-key certificates are always available and up-to-date. Problems associated to digital certificates management, like storage, retrieval, maintenance, and, specially, revocation, require special procedures that ensure reliable features because of the critical significance of inaccuracies. Most of the existing systems use a Certificate Revocation List, a repository of certificates that have been revoked before their expiration date. The need to access CRLs in order to check certificate revocations becomes a performance handicap. Furthermore, they introduce a source of vulnerability in the whole security infrastructure, as it is impossible to produce a new CRL each time a revocation takes place. This paper introduces an alternative for the storage of digital certificates that avoids the use of CRLs. The system is designed to provide a distributed management of digital certificates by using Certification Authorities that, while being part of a whole Public-Key Infrastructure, operate over local certificates databases. Communication protocols between local databases have been designed to minimize network traffic without a lack of security and efficiency.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jorge Davila, Javier Lopez, Rene Peralta
Una Solución Flexible para Redes Privadas Virtuales
In: VI Reunión Española de Criptología y Seguridad de la Información (VI RECSI), pp. 329-340, La Laguna, 2000, ISBN: 978-84789743-1-3.
@inproceedings{1737,
title = {Una Soluci\'{o}n Flexible para Redes Privadas Virtuales},
author = {Jorge Davila and Javier Lopez and Rene Peralta},
isbn = {978-84789743-1-3},
year = {2000},
date = {2000-09-01},
urldate = {2000-09-01},
booktitle = {VI Reuni\'{o}n Espa\~{n}ola de Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (VI RECSI)},
pages = {329-340},
address = {La Laguna},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jorge Davila, Javier Lopez, Antonio Mana, Juan J. Ortega, Jose M. Troya
Development of Secure Internet Applications for Governmental Environments
In: IEEE International Workshop on Electronic Government (in DEXA’00), pp. 362-365, IEEE Press IEEE Press, 2000, ISBN: 0-7695-0680-1.
@inproceedings{1721,
title = {Development of Secure Internet Applications for Governmental Environments},
author = {Jorge Davila and Javier Lopez and Antonio Mana and Juan J. Ortega and Jose M. Troya},
isbn = {0-7695-0680-1},
year = {2000},
date = {2000-01-01},
urldate = {2000-01-01},
booktitle = {IEEE International Workshop on Electronic Government (in DEXA’00)},
pages = {362-365},
publisher = {IEEE Press},
organization = {IEEE Press},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Jorge Davila, Lidia Fuentes, Javier Lopez, Jose M. Troya, Antonio Vallecillo
Internet Secure Communications Between Citizens and Public Administrations
In: IFIP Conference on Advances in Electronic Government, pp. 109-120, 2000.
@inproceedings{1722,
title = {Internet Secure Communications Between Citizens and Public Administrations},
author = {Jorge Davila and Lidia Fuentes and Javier Lopez and Jose M. Troya and Antonio Vallecillo},
year = {2000},
date = {2000-01-01},
urldate = {2000-01-01},
booktitle = {IFIP Conference on Advances in Electronic Government},
pages = {109-120},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Antonio Mana, Jose A. Montenegro, Juan J. Ortega, Jose M. Troya
Aspectos de Implementación de una Infraestructura de Clave Pública Distribuida
In: Simposio Español de Informática Distribuida (SEID’00), pp. 313-320, Orense, Espa, 2000.
@inproceedings{JavierLopez2000,
title = {Aspectos de Implementaci\'{o}n de una Infraestructura de Clave P\'{u}blica Distribuida},
author = {Javier Lopez and Antonio Mana and Jose A. Montenegro and Juan J. Ortega and Jose M. Troya},
url = {/wp-content/papers/JavierLopez2000.pdf},
year = {2000},
date = {2000-00-01},
urldate = {2000-00-01},
booktitle = {Simposio Espa\~{n}ol de Inform\'{a}tica Distribuida (SEID’00)},
pages = {313-320},
address = {Orense, Espa},
abstract = {La seguridad es uno de los aspectos m\'{a}s conflictivos del uso de Internet. La falta de una pol\'{i}tica de seguridad global est\'{a} frenando el desarrollo de Internet en \'{a}reas tan interesantes y prometedoras como el comercio electr\'{o}nico o la interacci\'{o}n con las administraciones p\'{u}blicas. Las t\'{e}cnicas criptogr\'{a}ficas actuales proporcionan un alto grado de confidencialidad; no obstante, es dif\'{i}cil garantizar la identificaci\'{o}n segura de los usuarios y, adem\'{a}s, la gesti\'{o}n de las claves de los mismos es poco eficiente y presenta graves problemas de escalabilidad. Este trabajo describe las caracter\'{i}sticas de implementaci\'{o}n de una soluci\'{o}n a ambos problemas basada en una Infraestructura de Clave P\'{u}blica (PKI) que proporciona una administraci\'{o}n simple y eficiente de las claves de los usuarios y posibilita la autenticaci\'{o}n segura de los mismos.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Areitio, Javier Lopez
Mecanismo de Seguridad de Bajo Costo para Micropagos
In: VI Reunion Española de Criptología y Seguridad de la Información (VI RECSI), pp. 193-200, La Laguna, Espa, 2000.
@inproceedings{JavierAreitio2000a,
title = {Mecanismo de Seguridad de Bajo Costo para Micropagos},
author = {Javier Areitio and Javier Lopez},
url = {/wp-content/papers/JavierAreitio2000a.pdf},
year = {2000},
date = {2000-00-01},
urldate = {2000-00-01},
booktitle = {VI Reunion Espa\~{n}ola de Criptolog\'{i}a y Seguridad de la Informaci\'{o}n (VI RECSI)},
pages = {193-200},
address = {La Laguna, Espa},
abstract = {La presente comunicaci\'{o}n presenta un mecanismo de micropagos flexible, de bajo costo que puede utilizarse para realizar pagos en l\'{i}nea entre el cliente y el vendedor y fuera de l\'{i}nea con el agente de negocios. Este mecanismo evita grandes almacenamientos de datos y c\'{a}lculos largos. Se puede implantar en software para el cliente y en hardware/software para el vendedor.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Juan J. Ortega
Cert’eM: Certification System Based on Electronic Mail Service Structure
In: Secure Networking (CQRE’99), pp. 109-118, Springer Springer, 1999.
@inproceedings{JavierLopez1999c,
title = {Cert’eM: Certification System Based on Electronic Mail Service Structure},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega},
url = {/wp-content/papers/JavierLopez1999c.pdf},
year = {1999},
date = {1999-12-01},
urldate = {1999-12-01},
booktitle = {Secure Networking (CQRE’99)},
volume = {1740},
pages = {109-118},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Public-Key Infrastructures are considered the basis of the protocols and tools needed to guarantee the security demanded for new Internet applications like electronic commerce, government-citizen relationships and digital distribution. This paper introduces a new infrastructure design, Cert’eM, a key management and certification system that is based on the structure of the electronic mail service and on the principle of near-certification. Cert’eM provides secure means to identify users and distribute their public-key certificates, enhances the efficiency of revocation procedures, and avoids scalability and synchronization problems. The system, developed and tested at the University of Malaga, was recently selected by RedIRIS, the National Research and Academic Network in Spain, to provide the public key service for its secure electronic mail.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Juan J. Ortega
An User Authentication Infrastructure for Extranet Applications
In: IEEE International Carnahan Conference on Security Technology, pp. 354-362, IEEE Press IEEE Press, Madrid, Spain, 1999.
@inproceedings{JavierLopez1999b,
title = {An User Authentication Infrastructure for Extranet Applications},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega},
url = {/wp-content/papers/JavierLopez1999b.pdf},
year = {1999},
date = {1999-10-01},
urldate = {1999-10-01},
booktitle = {IEEE International Carnahan Conference on Security Technology},
pages = {354-362},
publisher = {IEEE Press},
address = {Madrid, Spain},
organization = {IEEE Press},
abstract = {An Extranet is used to connect businesses with their suppliers, customers or other businesses that share common goals in a way that automates their administrative interactions using Internet technology. The security of the communications over Internet is considered an essential feature. To guarantee secure operation the aid of some user authentication infrastructure is needed. This paper introduces a Public Key Infrastructure (PKI) and user identification scheme to be used in extranet applications. The flexibility of the system allows it to fit the usual hierarchical organization structure.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Lidia Fuentes, Javier Lopez
Arquitectura Composicional de Seguridad para Servicios Telemáticos
In: II Jornadas de Ingeniería Telemática (JITEL’99), pp. 141-148, 1999, ISBN: 84-89315-14-0.
@inproceedings{1739,
title = {Arquitectura Composicional de Seguridad para Servicios Telem\'{a}ticos},
author = {Lidia Fuentes and Javier Lopez},
isbn = {84-89315-14-0},
year = {1999},
date = {1999-09-01},
urldate = {1999-09-01},
booktitle = {II Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’99)},
pages = {141-148},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Sigrid Gurgens, Javier Lopez, Rene Peralta
Efficient Detection of Failure Modes in Electronic Commerce Protocols
In: IEEE International Workshop on Electronic Commerce and Security, pp. 850-857, IEEE Press IEEE Press, Florence, Italy, 1999.
@inproceedings{SigridGuergens1999,
title = {Efficient Detection of Failure Modes in Electronic Commerce Protocols},
author = {Sigrid Gurgens and Javier Lopez and Rene Peralta},
year = {1999},
date = {1999-09-01},
urldate = {1999-09-01},
booktitle = {IEEE International Workshop on Electronic Commerce and Security},
pages = {850-857},
publisher = {IEEE Press},
address = {Florence, Italy},
organization = {IEEE Press},
abstract = {The design of key distribution and authentication protocols has been shown to be error-prone. These protocols constitute the part of more complex protocols used for electronic commerce transactions. Consequently, these new protocols are likely to contain flaws that are even more difficult to find. In this paper, we present a search method for detecting potential security flaws in such protocols. Our method relies on automatic theorem proving tools. Among others we present our analysis of a protocol recently standardized by the German standardization organization DIN to be used in digital signature applications for smartcards. Our analysis resulted in the standard being supplemented with comments that explain the possible use of cryptographic keys.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Alfonso Larrosa, Francisco Lopez, Javier Lopez
Competitive Neural Networks Applied to Image Compression Techniques
In: International Conference on Imaging Science, Systems and Technology (CISST’99), pp. 547-550, 1999.
@inproceedings{AlfonsoLarrosa1999,
title = {Competitive Neural Networks Applied to Image Compression Techniques},
author = {Alfonso Larrosa and Francisco Lopez and Javier Lopez},
year = {1999},
date = {1999-06-01},
urldate = {1999-06-01},
booktitle = {International Conference on Imaging Science, Systems and Technology (CISST’99)},
pages = {547-550},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Javier Lopez, Antonio Mana, Juan J. Ortega
A Public Key Infrastructure for User Identification
In: IFIP Working Conference on User Identification and Privacy Protection, pp. 209-227, Stockholm, Sweden, 1999.
@inproceedings{JavierLopez1999a,
title = {A Public Key Infrastructure for User Identification},
author = {Javier Lopez and Antonio Mana and Juan J. Ortega},
url = {/wp-content/papers/JavierLopez1999a.pdf},
year = {1999},
date = {1999-06-01},
urldate = {1999-06-01},
booktitle = {IFIP Working Conference on User Identification and Privacy Protection},
pages = {209-227},
address = {Stockholm, Sweden},
abstract = {While there is wide agreement on the immense potential of Internet, its growth and performance are adversely affected by security issues. Despite its impressive size, scope and reach, the Internet has not yet become a common vehicle for many of these new possibilities. Progress in fields as electronic commerce and government-citizen relationships have been limited by the open design of the network itself. Today, Public-Key Infrastructures are the basis of the protocols and tools needed to guarantee the security demanded in those fields. Trust management and user identification are also important issues that remain unresolved. This paper introduces a key management and user identification system, named Cert’eM, that is based on the electronic mail service. Cert’eM provides important advantages over existing Public-Key Infrastructures and user identification proposals.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Javier Areitio, Felipe Rosello
Problemática de Seguridad para el Comercio Electrónico en el Sector Turístico
In: I Congreso Nacional Turismo y Tecnología de la Información y las Comunicaciones (TURITEC’99), pp. 99-110, 1999.
@inproceedings{JavierLopez1999d,
title = {Problem\'{a}tica de Seguridad para el Comercio Electr\'{o}nico en el Sector Tur\'{i}stico},
author = {Javier Lopez and Javier Areitio and Felipe Rosello},
year = {1999},
date = {1999-00-01},
urldate = {1999-00-01},
booktitle = {I Congreso Nacional Turismo y Tecnolog\'{i}a de la Informaci\'{o}n y las Comunicaciones (TURITEC’99)},
pages = {99-110},
abstract = {Uno de los servicios que cada d\'{i}a cobra m\'{a}s importancia y que promete un cambio radical para las empresas es el comercio electr\'{o}nico en Internet, pero tradicionalmente las empresas relacionadas con el turismo s\'{o}lo han empleado la red para darse a conocer y ofertar sus productos. La raz\'{o}n esencial es la desconfianza que existe sobre la seguridad de las transacciones llevadas a cabo en la red. La criptograf\'{i}a de clave p\'{u}blica proporciona servicios adecuados para garantizar la seguridad de esas transacciones. Pero en la actualidad, algunos de esos servicios est\'{a}n menos desarrollados que otros; un ejemplo de ellos es el servicio de No-Repudio. En este art\'{i}culo se estudian distintas formas de ofrecer servicios de no-repudio y se analizan sus ventajas y desventajas en funci\'{o}n de las necesidades del entorno en que se utilicen.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Antonio Mana, Francisco Villalba, Javier Lopez
Secure Examinations Through The Internet
In: IFIP World Computer Congress, pp. 695-708, 1998.
@inproceedings{AntonioMana1998,
title = {Secure Examinations Through The Internet},
author = {Antonio Mana and Francisco Villalba and Javier Lopez},
year = {1998},
date = {1998-08-01},
urldate = {1998-08-01},
booktitle = {IFIP World Computer Congress},
pages = {695-708},
abstract = {The objective of the present work is to present a solution to the problem of simultaneously examining groups of students in different computer laboratories while each student uses a computer with Internet access. The system presented focus on security and ease of use, being, at the same time, transparent to the users (students) and providing added services to the main objective of simultaneous examinations in several rooms with just one teacher.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Francisco Lopez, Javier Lopez, Juan A. Manceras, Antonio Mana
Automatic Conversion of Scanned Maps to a Vector Based 3D Representation
In: International Conference on Imaging Science, Systems, and Technology (CISST’98), Las Vegas, USA, 1998.
@inproceedings{JavierLopez1998a,
title = {Automatic Conversion of Scanned Maps to a Vector Based 3D Representation},
author = {Francisco Lopez and Javier Lopez and Juan A. Manceras and Antonio Mana},
year = {1998},
date = {1998-07-01},
urldate = {1998-07-01},
booktitle = {International Conference on Imaging Science, Systems, and Technology (CISST’98)},
address = {Las Vegas, USA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Francisco Lopez, Javier Lopez, Juan A. Manceras, Antonio Mana
Neural Networks Applied to the Estimation of Object Orientation
In: International Conference on Imaging Science, Systems, and Technology (CISST’98), pp. 418-424, Las Vegas, USA, 1998.
@inproceedings{JavierLopez1999,
title = {Neural Networks Applied to the Estimation of Object Orientation},
author = {Francisco Lopez and Javier Lopez and Juan A. Manceras and Antonio Mana},
url = {/wp-content/papers/JavierLopez1999.pdf},
year = {1998},
date = {1998-07-01},
urldate = {1998-07-01},
booktitle = {International Conference on Imaging Science, Systems, and Technology (CISST’98)},
pages = {418-424},
address = {Las Vegas, USA},
abstract = {We present in this paper a first approach to the use of artificial neural as a tool to determine the orientation of objects moving on a conveyor belt in a car assembly line. The capability of neural networks to generalise is a key element in the calculation of an object’s orientation. In this sense, a neural network with Competitive Hebbian Learning can identify the angle of a part never used in its training process. The equilibrium between exactitude and processing time is also studied.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Lucia Pino, Javier Lopez, Francisco Lopez, Carlos Maraval
Aproximacion de Funciones mediante Redes Neuronales
In: pp. 209-215, 1997, ISBN: 84-89654-03-4.
@inproceedings{1740,
title = {Aproximacion de Funciones mediante Redes Neuronales},
author = {Lucia Pino and Javier Lopez and Francisco Lopez and Carlos Maraval},
isbn = {84-89654-03-4},
year = {1997},
date = {1997-09-01},
urldate = {1997-09-01},
pages = {209-215},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Lucia Pino, Antonio Mana, Juan J. Ortega, Javier Lopez
Sistema Jerárquico de Administración de Claves Públicas para el Correo Electrónico
In: I Jornadas de Ingeniería Telemática (JITEL’97), pp. 295-302, Bilbao (Spain), 1997, ISBN: 84-89654-04-2.
@inproceedings{1741,
title = {Sistema Jer\'{a}rquico de Administraci\'{o}n de Claves P\'{u}blicas para el Correo Electr\'{o}nico},
author = {Lucia Pino and Antonio Mana and Juan J. Ortega and Javier Lopez},
isbn = {84-89654-04-2},
year = {1997},
date = {1997-09-01},
urldate = {1997-09-01},
booktitle = {I Jornadas de Ingenier\'{i}a Telem\'{a}tica (JITEL’97)},
pages = {295-302},
address = {Bilbao (Spain)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Francisco Lopez, Javier Lopez, Lucia Pino, Carlos Maraval
Neural Networks for Systems Security
In: 5th European Congress of Intelligent Techniques and Soft Computing (EUFIT’97), pp. 410-413, Germany, 1997.
@inproceedings{FranciscoLopez1997,
title = {Neural Networks for Systems Security},
author = {Francisco Lopez and Javier Lopez and Lucia Pino and Carlos Maraval},
year = {1997},
date = {1997-08-01},
urldate = {1997-08-01},
booktitle = {5th European Congress of Intelligent Techniques and Soft Computing (EUFIT’97)},
pages = {410-413},
address = {Germany},
abstract = {This paper is a first approach in the use of Neural Networks for security. We apply it for electronic mail private systems in Local Area Networks. Some of these systems use public keys directories which must be protected suitably. This task is very complicated because all users in the systems must be able to change their public keys in those directories. We see the advantage of using Neural Networks versus other classical methods to resolve this problem.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Francisco Lopez, Javier Lopez, Alvaro Vergara, Lucia Pino
Determination of Objects Orientation in Assembly Lines using Neural Networks
In: 5th Intern. Conf. on Computer Aided Systems Theory and Technology (EUROCAST’97), pp. 183-189, Las Palmas, Spain, 1997.
@inproceedings{FranciscoLopez1997a,
title = {Determination of Objects Orientation in Assembly Lines using Neural Networks},
author = {Francisco Lopez and Javier Lopez and Alvaro Vergara and Lucia Pino},
year = {1997},
date = {1997-02-01},
urldate = {1997-02-01},
booktitle = {5th Intern. Conf. on Computer Aided Systems Theory and Technology (EUROCAST’97)},
pages = {183-189},
address = {Las Palmas, Spain},
abstract = {This paper is a first approach to the use of artificial neural networks as a tool to estimate the orientation of an object, and is mainly directed towards industrial applications. The capability of neural networks to generalise is a key element in the calculation of an object’s orientation. In this sense, a neural network can identify the angle of a part never seen before. To evaluate the efficiency of this method we have performed a series of tests with the different parts used in a car assembly line.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Lucia Pino, Javier Lopez, Francisco Lopez, Carlos Maraval
A Tool for Functions Approximation by Neural Networks
In: 5th European Congress of Intelligent Techniques and Soft Computing (EUFIT’97), pp. 557-564, Aachen (Germany), 1997.
@inproceedings{1723,
title = {A Tool for Functions Approximation by Neural Networks},
author = {Lucia Pino and Javier Lopez and Francisco Lopez and Carlos Maraval},
year = {1997},
date = {1997-01-01},
urldate = {1997-01-01},
booktitle = {5th European Congress of Intelligent Techniques and Soft Computing (EUFIT’97)},
pages = {557-564},
address = {Aachen (Germany)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Antonio Mana, Javier Lopez, Lucia Pino, Juan J. Ortega, Carlos Maraval
Incremento de la Seguridad del Estandar de Cifrado de Datos basado en la Combinación de Datos y Clave
In: III Jornadas de Informática y Automática, pp. 423-432, El Puerto de Santa María, España, 1997.
@inproceedings{AntonioMana1997,
title = {Incremento de la Seguridad del Estandar de Cifrado de Datos basado en la Combinaci\'{o}n de Datos y Clave},
author = {Antonio Mana and Javier Lopez and Lucia Pino and Juan J. Ortega and Carlos Maraval},
url = {/wp-content/papers/AntonioMana1997.pdf},
year = {1997},
date = {1997-00-01},
urldate = {1997-00-01},
booktitle = {III Jornadas de Inform\'{a}tica y Autom\'{a}tica},
pages = {423-432},
address = {El Puerto de Santa Mar\'{i}a, Espa\~{n}a},
abstract = {A pesar del gran esfuerzo investigador llevado a cabo, el ataque al DES ha sido infructuoso desde que a mediados de los setenta fue adoptado como est\'{a}ndar por el U. S. National Bureau of Standards. El criptoan\'{a}lisis diferencial constituye la base de las primeras t\'{e}cnicas capaces de acabar con tal invulnerabilidad. Las t\'{e}cnicas de criptoan\'{a}lisis basadas en modelos de fallos y su adaptaci\'{o}n a DES, el criptoan\'{a}lisis de fallos diferencial, son dos de esas t\'{e}cnicas que han conseguido recientemente romper sistemas DES (aunque el ataque est\'{a} limitado a ciertos casos especiales, en particular implementaciones hardware). En este art\'{i}culo se presenta un punto d\'{e}bil de DES sobre el cual puede aumentarse la seguridad y se propone una modificaci\'{o}n de la estructura interna de DES con objeto de mejorar su resistencia ante el criptoan\'{a}lisis diferencial y por ende de los ataques derivados de este. La modificaci\'{o}n introducida no supone un coste adicional elevado},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Gonzalo Ramos, Rafael Morales
Comparación de la Condición de Parikh con algunas Condiciones de los Lenguajes de Contexto Libre
In: II Jornadas de Informática y Automática, pp. 305-314, Almuñecar, España, 1996.
@inproceedings{JavierLopez1996a,
title = {Comparaci\'{o}n de la Condici\'{o}n de Parikh con algunas Condiciones de los Lenguajes de Contexto Libre},
author = {Javier Lopez and Gonzalo Ramos and Rafael Morales},
url = {/wp-content/papers/JavierLopez1996a.pdf},
year = {1996},
date = {1996-00-01},
urldate = {1996-00-01},
booktitle = {II Jornadas de Inform\'{a}tica y Autom\'{a}tica},
pages = {305-314},
address = {Almu\~{n}ecar, Espa\~{n}a},
abstract = {In this paper we first compare Parikh’s condition to various pumping conditions - Bar-Hillel’s pumping lemma, Ogden’s condition and Bader-Moura’s condition; secondly, to interchange condition; and finally, to Sokolowski’s and Grant’s conditions. In order to carry out these comparisons we present some properties of Parikh’s languages. The main result is the orthogonality of the previously mentioned conditions and Parikh’s condition.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Francisco Ona, Lucia Pino, Carlos Maraval
Generación de Números Primos mediante Tests de Primalidad Probabilístas
In: IV Reunión Española de Criptología (IV REC), pp. 27-33, Valladolid, España, 1996.
@inproceedings{JavierLopez1996,
title = {Generaci\'{o}n de N\'{u}meros Primos mediante Tests de Primalidad Probabil\'{i}stas},
author = {Javier Lopez and Francisco Ona and Lucia Pino and Carlos Maraval},
year = {1996},
date = {1996-00-01},
urldate = {1996-00-01},
booktitle = {IV Reuni\'{o}n Espa\~{n}ola de Criptolog\'{i}a (IV REC)},
pages = {27-33},
address = {Valladolid, Espa\~{n}a},
abstract = {Nowadays cryptography is present in nearly every aspect of our everyday life, in particular public-key cryptosystems. Some of them have a mathematical foundation of number theory working with big integer numbers. Factoring these numbers is more complex and time-consuming than generating and testing prime numbers; this is the main reason for the strenght of some public key cryptosystems. This paper presents three different probabilistic methods for testing big prime numbers in a reasonable amount of time. A comparison of their efficiency to test prime numbers is also introduced.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Gonzalo Ramos, Javier Lopez
ID3f+A. Algoritmo de Aprendizaje Inductivo Borroso con División Intervalar Automática de los Atributos
In: VI Congreso Español Sobre Tecnologías y Lógica Fuzzy (ESTYLF’96), pp. 225-230, 1996.
@inproceedings{GonzaloRamos1996,
title = {ID3f+A. Algoritmo de Aprendizaje Inductivo Borroso con Divisi\'{o}n Intervalar Autom\'{a}tica de los Atributos},
author = {Gonzalo Ramos and Javier Lopez},
url = {/wp-content/papers/GonzaloRamos1996.pdf},
year = {1996},
date = {1996-00-01},
urldate = {1996-00-01},
booktitle = {VI Congreso Espa\~{n}ol Sobre Tecnolog\'{i}as y L\'{o}gica Fuzzy (ESTYLF’96)},
pages = {225-230},
abstract = {Uno de los campos m\'{a}s prometedores dentro del estudio de la ambig\"{u}edad es el del aprendizaje, tanto por su importancia consusntacial como por su relaci\'{o}n con la Inteligencia Artificial. Esta relaci\'{o}n se hace evidente cuando intentamos resolver, desde una perspectiva borrosa, el problema de la adquisici\'{o}n autom\'{a}tica del conocimiento en sistemas expertos. El algoritmo ID3, el m\'{a}s relevante de los utilizados para la inducci\'{o}n de \'{a}rboles de decisi\'{o}n, no es utilizable tal cual con un concepto borroso del concepto de pertenencia. Adem\'{a}s se muestra ineficiente cuando no existe un experto humano que defina correctamente los subrangos de actuaci\'{o}n para los atributos que junto a las clases expresan las relaciones entre situaciones que este algoritmo de aprendizaje intenta descubrir. Proponemos como soluci\'{o}n un nuevo algoritmo, el ID3f+A, que posee la capacidad de tratamiento borroso del concepto de pertenencia, gracias a una modificaci\'{o}n del concepto de entrop\'{i}a, y adem\'{a}s realiza la divisi\'{o}n intervalar autom\'{a}tica de los atributos, merced al control del proceso inductivo por medio de la utilizaci\'{o}n de experiencias de control.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Francisco Lopez, Javier Lopez, Carlos Maraval
Image Compression Based on Competitive Hebbian Learning Neural Networks
In: Brain Processes, Theories and Models International Conference, pp. 478-482, Las Palmas, Spain, 1995.
@inproceedings{FranciscoLopez1995,
title = {Image Compression Based on Competitive Hebbian Learning Neural Networks},
author = {Francisco Lopez and Javier Lopez and Carlos Maraval},
year = {1995},
date = {1995-10-01},
urldate = {1995-10-01},
booktitle = {Brain Processes, Theories and Models International Conference},
pages = {478-482},
address = {Las Palmas, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Francisco Ona, Lucia Pino, Carlos Maraval
Seguridad de Directorios en Criptosistemas de Clave Pública mediante Redes Neuronales en Sistemas de Comunicaciones
In: X Symposium Nacional de la Unión Científica Internacional de Radio (URSI’95), pp. 147-150, Valladolid, España, 1995.
@inproceedings{JavierLopez1995,
title = {Seguridad de Directorios en Criptosistemas de Clave P\'{u}blica mediante Redes Neuronales en Sistemas de Comunicaciones},
author = {Javier Lopez and Francisco Ona and Lucia Pino and Carlos Maraval},
year = {1995},
date = {1995-00-01},
urldate = {1995-00-01},
booktitle = {X Symposium Nacional de la Uni\'{o}n Cient\'{i}fica Internacional de Radio (URSI’95)},
pages = {147-150},
address = {Valladolid, Espa\~{n}a},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Javier Lopez, Carlos Maraval
Sistema de Cifrado de Correo Electrónico en Red de Area Local
In: III Reunión Española de Criptología (III REC), pp. 133-138, Barcelona, España, 1994.
@inproceedings{JavierLopez1994,
title = {Sistema de Cifrado de Correo Electr\'{o}nico en Red de Area Local},
author = {Javier Lopez and Carlos Maraval},
year = {1994},
date = {1994-00-01},
urldate = {1994-00-01},
booktitle = {III Reuni\'{o}n Espa\~{n}ola de Criptolog\'{i}a (III REC)},
pages = {133-138},
address = {Barcelona, Espa\~{n}a},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Theo Dimitrakos, Javier Lopez, Fabio Martinelli
Collaborative Approaches for Cyber Security in Cyber-Physical Systems
Springer, 2023, ISBN: 9783031160882.
BibTeX | Links:
@book{Lopez2023,
title = {Collaborative Approaches for Cyber Security in Cyber-Physical Systems},
author = {Theo Dimitrakos and Javier Lopez and Fabio Martinelli},
url = {https://link.springer.com/book/10.1007/978-3-031-16088-2},
doi = {10.1007/978-3-031-16088-2},
isbn = {9783031160882},
year = {2023},
date = {2023-01-02},
urldate = {2023-01-02},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Cristina Alcaraz
Security and Privacy Trends in the Industrial Internet of Things
Springer, 2019, ISBN: 978-3-030-12330-7.
BibTeX | Links:
@book{1776,
title = {Security and Privacy Trends in the Industrial Internet of Things},
author = {Cristina Alcaraz},
url = {https://www.springer.com/gp/book/9783030123291},
isbn = {978-3-030-12330-7},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
publisher = {Springer},
organization = {Springer},
series = {Advanced Sciences and Technologies for Security Applications},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Ruben Rios, Javier Lopez, Jorge Cuellar
Location Privacy in Wireless Sensor Networks
Taylor & Francis, 2016, ISBN: 9781498776332.
BibTeX | Links:
@book{Rios2016,
title = {Location Privacy in Wireless Sensor Networks},
author = {Ruben Rios and Javier Lopez and Jorge Cuellar},
url = {https://www.crcpress.com/Location-Privacy-in-Wireless-Sensor-Networks/Rios-Lopez-Cuellar/p/book/9781498776332},
isbn = {9781498776332},
year = {2016},
date = {2016-01-01},
urldate = {2016-01-01},
publisher = {Taylor \& Francis},
organization = {Taylor \& Francis},
series = {CRC Series in Security, Privacy and Trust},
keywords = {},
pubstate = {published},
tppubtype = {book}
}

Carmen Fernandez-Gago, Massimo Felici
Accountability and Security in the Cloud
2015.
@book{1517,
title = {Accountability and Security in the Cloud},
author = {Carmen Fernandez-Gago and Massimo Felici},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
volume = {8937},
series = {Lecture Notes in Computer Science},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Maritta Heisel, Wouter Joosen, Javier Lopez, Fabio Martinelli
Engineering Secure Future Internet Services and Systems- Current Research
Springer, 2014.
@book{1483,
title = {Engineering Secure Future Internet Services and Systems- Current Research},
author = {Maritta Heisel and Wouter Joosen and Javier Lopez and Fabio Martinelli},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
volume = {8431},
publisher = {Springer},
organization = {Springer},
series = {Lecture Notes in Computer Science},
abstract = {This State-of-the-Art Survey contains a selection of papers representing state-of-the-art results in the engineering of secure software-based Future Internet services and systems, produced by the NESSoS project researchers. The engineering approach of the Network of Excellence NESSoS, funded by the European Commission, is based on the principle of addressing security concerns from the very beginning in all software development phases, thus contributing to reduce the amount of software vulnerabilities and enabling the systematic treatment of security needs through the engineering process. The 15 papers included in this volume deal with the main NESSoS research areas: security requirements for Future Internet services; creating secure service architectures and secure service design; supporting programming environments for secure and composable services; enabling security assurance and integrating former results in a risk-aware and cost-aware software life-cycle.},
keywords = {},
pubstate = {published},
tppubtype = {book}
}

Javier Lopez, Roberto Setola, Stephen Wolthusen (Ed.)
Advances in Critical Infrastructure Protection: Information Infrastructure Models, Analysis, and Defense
Springer, 2012, ISSN: 978-3-642-28919-4.
@book{1696,
title = {Advances in Critical Infrastructure Protection: Information Infrastructure Models, Analysis, and Defense},
editor = {Javier Lopez and Roberto Setola and Stephen Wolthusen},
issn = {978-3-642-28919-4},
year = {2012},
date = {2012-01-01},
urldate = {2012-01-01},
volume = {6715},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Romain Carbou, Michel Diaz, Ernesto Exposito, Rodrigo Roman
Digital Home Networking
Wiley-ISTE, 2011, ISSN: 1848213212.
BibTeX | Links:
@book{RomFatH11,
title = {Digital Home Networking},
author = {Romain Carbou and Michel Diaz and Ernesto Exposito and Rodrigo Roman},
url = {http://as.wiley.com/WileyCDA/WileyTitle/productCd-1848213212.html},
issn = {1848213212},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
publisher = {Wiley-ISTE},
organization = {Wiley-ISTE},
keywords = {},
pubstate = {published},
tppubtype = {book}
}

Jose A. Onieva, Javier Lopez, Jianying Zhou
Secure Multi-Party Non-Repudiation Protocols and Applications
Springer, 2009, ISBN: 978-0-387-75629-5.
BibTeX | Links:
@book{Onieva2009,
title = {Secure Multi-Party Non-Repudiation Protocols and Applications},
author = {Jose A. Onieva and Javier Lopez and Jianying Zhou},
url = {http://www.springer.com/computer/security+and+cryptology/book/978-0-387-75629-5},
doi = {10.1007/978-0-387-75630-1},
isbn = {978-0-387-75629-5},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
volume = {43},
publisher = {Springer},
organization = {Springer},
series = {Advances in Information Security},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Steven Furnell, Sokratis K. Katsikas, Javier Lopez, Ahmed Patel
Securing Information and Communications Systems: Principles, Technologies and Applications
Artech House, 2008, ISSN: 1596932287.
@book{1620,
title = {Securing Information and Communications Systems: Principles, Technologies and Applications},
author = {Steven Furnell and Sokratis K. Katsikas and Javier Lopez and Ahmed Patel},
issn = {1596932287},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
publisher = {Artech House},
organization = {Artech House},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Javier Lopez, Jianying Zhou
Wireless Sensor Networks Security
IOS Press, 2008, ISSN: 9781586038137.
BibTeX | Links:
@book{1621,
title = {Wireless Sensor Networks Security},
author = {Javier Lopez and Jianying Zhou},
url = {http://www.iospress.com/loadtop/load_1.php?isbn=9781586038137},
issn = {9781586038137},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
volume = {1},
publisher = {IOS Press},
organization = {IOS Press},
series = {Cryptology and Information Security Series},
keywords = {},
pubstate = {published},
tppubtype = {book}
}

Davide Ferraris, Carmen Fernandez-Gago, Javier Lopez
POM: A Trust-based AHP-like Methodology to Solve Conflict Requirements for the IoT
In: Collaborative Approaches for Cyber Security in Cyber-Physical Systems, pp. 145-170, Springer, 2023, ISSN: 1613-5113.
BibTeX | Links:
@incollection{2013,
title = {POM: A Trust-based AHP-like Methodology to Solve Conflict Requirements for the IoT},
author = {Davide Ferraris and Carmen Fernandez-Gago and Javier Lopez},
url = {/wp-content/papers/2013.pdf
https://link.springer.com/chapter/10.1007/978-3-031-16088-2_7},
doi = {https://doi.org/10.1007/978-3-031-16088-2_7},
issn = {1613-5113},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {Collaborative Approaches for Cyber Security in Cyber-Physical Systems},
pages = {145-170},
publisher = {Springer},
organization = {Springer},
series = {Part of the Advanced Sciences and Technologies for Security Applications book series (ASTSA)},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Ruben Rios
Recipient Anonymity
In: Sushil Jajodia, Pierangela Samarati, Moti Yung (Ed.): 2021.
BibTeX | Links:
@incollection{Rios2024,
title = {Recipient Anonymity},
author = {Ruben Rios },
editor = {Sushil Jajodia and Pierangela Samarati and Moti Yung},
doi = {10.1007/978-3-642-27739-9},
year = {2021},
date = {2021-12-23},
urldate = {2021-12-23},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Cristina Alcaraz
Situational Awareness for CPS
In: Encyclopedia of Cryptography, Security and Privacy, pp. 1–3, Springer Berlin Heidelberg, Berlin, Heidelberg, 2021, ISBN: 978-3-642-27739-9.
BibTeX | Links:
@incollection{Alcaraz2021d,
title = {Situational Awareness for CPS},
author = {Cristina Alcaraz},
url = {/wp-content/papers/Alcaraz2021d.pdf},
doi = {10.1007/978-3-642-27739-9_1732-1},
isbn = {978-3-642-27739-9},
year = {2021},
date = {2021-08-01},
urldate = {2021-08-01},
booktitle = {Encyclopedia of Cryptography, Security and Privacy},
pages = {1\textendash3},
publisher = {Springer Berlin Heidelberg},
address = {Berlin, Heidelberg},
organization = {Springer Berlin Heidelberg},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Ioannis Stellios, Panayiotis Kotzanikolaou, Mihalis Psarakis, Cristina Alcaraz
Risk Assessment for IoT-Enabled Cyber-Physical Systems
In: Advances in Core Computer Science-Based Technologies, pp. 157-173, Springer International Publishing, Cham, 2021, ISBN: 978-3-030-41196-1.
@incollection{1844,
title = {Risk Assessment for IoT-Enabled Cyber-Physical Systems},
author = {Ioannis Stellios and Panayiotis Kotzanikolaou and Mihalis Psarakis and Cristina Alcaraz},
url = {/wp-content/papers/1844.pdf},
doi = {10.1007/978-3-030-41196-1_8},
isbn = {978-3-030-41196-1},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
booktitle = {Advances in Core Computer Science-Based Technologies},
pages = {157-173},
publisher = {Springer International Publishing},
address = {Cham},
organization = {Springer International Publishing},
abstract = {Internet of Things (IoT) technologies have enabled Cyber-Physical Systems (CPS) to become fully interconnected. This connectivity however has radically changed their threat landscape. Existing risk assessment methodologies often fail to identify various attack paths that stem from the new connectivity/functionality features of IoT-enabled CPS. Even worse, due to their inherent characteristics, IoT systems are usually the weakest link in the security chain and thus many attacks utilize IoT technologies as their key enabler. In this paper we review risk assessment methodologies for IoT-enabled CPS. In addition, based on our previous work (Stellios et al. in IEEE Commun Surv Tutor 20:3453\textendash3495, 2018, [47]) on modeling IoT-enabled cyberattacks, we present a high-level risk assessment approach, specifically suited for IoT-enabled CPS. The mail goal is to enable an assessor to identify and assess emphnon-obvious(indirect or subliminal) attack paths introduced by IoT technologies, that usually target mission critical components of an CPS.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Ana Nieto, Ruben Rios, Javier Lopez
Privacy-Aware Digital Forensics
In: Security and Privacy for Big Data, Cloud Computing and Applications, The Institution of Engineering and Technology (IET), United Kingdom, 2019, ISBN: 978-1-78561-747-8.
BibTeX | Links:
@incollection{1777,
title = {Privacy-Aware Digital Forensics},
author = {Ana Nieto and Ruben Rios and Javier Lopez},
url = {/wp-content/papers/1777.pdf
https://www.amazon.es/Security-Privacy-Computing-Applications-Networks/dp/1785617478},
isbn = {978-1-78561-747-8},
year = {2019},
date = {2019-09-01},
urldate = {2019-09-01},
booktitle = {Security and Privacy for Big Data, Cloud Computing and Applications},
publisher = {The Institution of Engineering and Technology (IET)},
address = {United Kingdom},
edition = {Lizhe Wang, Wei Ren, Raymoond Choo and Fatos Xhafa},
organization = {The Institution of Engineering and Technology (IET)},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Cristina Alcaraz
Secure Interconnection of IT-OT Networks in Industry 4.0
In: Critical Infrastructure Security and Resilience: Theories, Methods, Tools and Technologies, pp. 201-217, Springer International Publishing, 2019, ISBN: 978-3-030-00024-0.
@incollection{alcaraz2019,
title = {Secure Interconnection of IT-OT Networks in Industry 4.0},
author = {Cristina Alcaraz},
url = {/wp-content/papers/alcaraz2019.pdf},
doi = {10.1007/978-3-030-00024-0_11},
isbn = {978-3-030-00024-0},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
booktitle = {Critical Infrastructure Security and Resilience: Theories, Methods, Tools and Technologies},
pages = {201-217},
publisher = {Springer International Publishing},
organization = {Springer International Publishing},
series = {Advanced Sciences and Technologies for Security Applications book series (ASTSA)},
abstract = {Increasingly, the society is witnessing how today’s industry is adapting the new technologies and communication protocols to offer more optimal and reliable services to end-users, with support for inter-domain communication belonging to diverse critical infrastructures. As a consequence of this technological revolution, interconnection mechanisms are required to offer transparency in the connections and protection in the different application domains, without this implying a significant degradation of the control requirements. Therefore, this book chapter presents a reference architecture for the new Industry 4.0 where the interconnection core is mainly concentrated in the Policy Decision Points (PDP), which can be deployed in high volume data processing and storage technologies such as cloud and fog servers. Each PDP authorizes actions in the field/plant according to a set of factors (entities, context and risks) computed through the existing access control measures, such as RBAC+ABAC+Risk-BAC (Role/Attribute/Risk-Based Access Control, respectively), to establish coordinated and constrained accesses in extreme situations. Part of these actions also includes proactive risk assessment measures to respond to anomalies or intrusive threats in time.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Antonio Muñoz, Jamal Toutouh, Francisco Jaime
A review of dynamic verification of security and dependability properties
In: IGI Global (Ed.): pp. 27, 2019, ISBN: 9781522573531.
@incollection{jaime2019,
title = {A review of dynamic verification of security and dependability properties},
author = {Antonio Mu\~{n}oz, Jamal Toutouh, Francisco Jaime},
editor = {IGI Global},
doi = {10.4018/978-1-5225-7353-1.ch007},
isbn = {9781522573531},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
pages = {27},
chapter = {7},
abstract = {This chapter reviews the notions of security and dependability properties from the
perspective of software engineering, providing the reader with a technical background
on dynamic verification and runtime monitoring techniques. The chapter covers the
technical background on security and dependability properties with system verification
through dynamic verification or monitoring. The authors initially provide a short
overview of the security and dependability properties themselves. Once definitions
of security and dependability properties are introduced, they present a critical
analysis of current research on dynamic verification by presenting general purpose
and security oriented dynamic verification approaches.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
perspective of software engineering, providing the reader with a technical background
on dynamic verification and runtime monitoring techniques. The chapter covers the
technical background on security and dependability properties with system verification
through dynamic verification or monitoring. The authors initially provide a short
overview of the security and dependability properties themselves. Once definitions
of security and dependability properties are introduced, they present a critical
analysis of current research on dynamic verification by presenting general purpose
and security oriented dynamic verification approaches.
Cristina Alcaraz, Javier Lopez
Secure Interoperability in Cyber-Physical Systems
In: Security Solutions and Applied Cryptography in Smart Grid Communications, IGI Global, USA, pp. 137-158, IGI Global, USA, 2017, ISBN: 9781522518297.
@incollection{1603,
title = {Secure Interoperability in Cyber-Physical Systems},
author = {Cristina Alcaraz and Javier Lopez},
url = {/wp-content/papers/1603.pdf},
doi = {10.4018/978-1-5225-1829-7.ch008},
isbn = {9781522518297},
year = {2017},
date = {2017-01-01},
urldate = {2017-01-01},
booktitle = {Security Solutions and Applied Cryptography in Smart Grid Communications, IGI Global, USA},
pages = {137-158},
publisher = {IGI Global},
address = {USA},
chapter = {8},
organization = {IGI Global},
abstract = {Transparency in control transactions under a secure network architecture is a key topic that must be discussed when aspects related to interconnection between heterogeneous cyber-physical systems (CPSs) arise. The interconnection of these systems can be addressed through an enforcement policy system responsible for managing access control according to the contextual conditions. However, this architecture is not always adequate to ensure a rapid interoperability in extreme crisis situations, and can require an interconnection strategy that permits the timely authorized access from anywhere at any time. To do this, a set of interconnection strategies through the Internet must be studied to explore the ability of control entities to connect to the remote CPSs and expedite their operations, taking into account the context conditions. This research constitutes the contribution of this chapter, where a set of control requirements and interoperability properties are identified to discern the most suitable interconnection strategies.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Cristina Alcaraz, Lorena Cazorla, Javier Lopez
Cyber-Physical Systems for Wide-Area Situational Awareness
In: Cyber-Physical Systems: Foundations, Principles and Applications, pp. 305 – 317, Academic Press, Boston, 2017, ISBN: 978-0-12-803801-7.
@incollection{1590,
title = {Cyber-Physical Systems for Wide-Area Situational Awareness},
author = {Cristina Alcaraz and Lorena Cazorla and Javier Lopez},
url = {/wp-content/papers/1590.pdf},
doi = {10.1016/B978-0-12-803801-7.00020-1},
isbn = {978-0-12-803801-7},
year = {2017},
date = {2017-00-01},
urldate = {2017-00-01},
booktitle = {Cyber-Physical Systems: Foundations, Principles and Applications},
pages = {305 - 317},
publisher = {Academic Press},
address = {Boston},
chapter = {20},
organization = {Academic Press},
series = {Intelligent Data-Centric Systems},
abstract = {Abstract Cyber-physical systems (CPSs), integrated in critical infrastructures, could provide the minimal services that traditional situational awareness (SA) systems demand. However, their application in SA solutions for the protection of large control distributions against unforeseen faults may be insufficient. Dynamic protection measures have to be provided not only to locally detect unplanned deviations but also to prevent, respond, and restore from these deviations. The provision of these services as an integral part of the SA brings about a new research field known as wide-area situational awareness (WASA), highly dependent on CPSs for control from anywhere across multiple interconnections, and at any time. Thus, we review the state-of-the art of this new paradigm, exploring the different preventive and corrective measures considering the heterogeneity of CPSs, resulting in a guideline for the construction of automated WASA systems.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Carmen Fernandez-Gago, David Nuñez
Metrics for Accountability in the Cloud
In: Accountability and Security in the Cloud, vol. 8937, pp. 129-153, 2015.
@incollection{1512,
title = {Metrics for Accountability in the Cloud},
author = {Carmen Fernandez-Gago and David Nu\~{n}ez},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
booktitle = {Accountability and Security in the Cloud},
volume = {8937},
pages = {129-153},
series = {LNCS Tutorial},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
David Nuñez, Isaac Agudo, Javier Lopez
Privacy-Preserving Identity Management as a Service
In: Massimo Felici, Carmen Fernandez-Gago (Ed.): Accountability and Security in the Cloud, vol. 8937, pp. 114-125, Springer International Publishing, 2015, ISBN: 978-3-319-17198-2.
@incollection{nunez15privacy,
title = {Privacy-Preserving Identity Management as a Service},
author = {David Nu\~{n}ez and Isaac Agudo and Javier Lopez},
editor = {Massimo Felici and Carmen Fernandez-Gago},
doi = {10.1007/978-3-319-17199-9_5},
isbn = {978-3-319-17198-2},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
booktitle = {Accountability and Security in the Cloud},
volume = {8937},
pages = {114-125},
publisher = {Springer International Publishing},
organization = {Springer International Publishing},
series = {Lecture Notes in Computer Science},
abstract = {In this paper we tackle the problem of privacy and confidentiality in Identity Management as a Service (IDaaS). The adoption of cloud computing technologies by organizations has fostered the externalization of the identity management processes, shaping the concept of Identity Management as a Service. However, as it has happened to other cloud-based services, the cloud poses serious risks to the users, since they lose the control over their data. As part of this work, we analyze these concerns and present a model for privacy-preserving IDaaS, called BlindIdM, which is designed to provide data privacy protection through the use of cryptographic safeguards.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Francisco Moyano, Carmen Fernandez-Gago, Benoit Baudry, Javier Lopez
Engineering Trust-Awareness and Self-adaptability in Services and Systems
In: Engineering Secure Future Internet Services and Systems, vol. 8431, pp. 180-209, Springer, 2014, ISSN: 0302-9743.
@incollection{moyano14esfi,
title = {Engineering Trust-Awareness and Self-adaptability in Services and Systems},
author = {Francisco Moyano and Carmen Fernandez-Gago and Benoit Baudry and Javier Lopez},
url = {/wp-content/papers/moyano14esfi.pdf},
doi = {10.1007/978-3-319-07452-8_8},
issn = {0302-9743},
year = {2014},
date = {2014-03-01},
urldate = {2014-03-01},
booktitle = {Engineering Secure Future Internet Services and Systems},
volume = {8431},
pages = {180-209},
publisher = {Springer},
chapter = {8},
organization = {Springer},
series = {LNCS},
abstract = {The Future Internet (FI) comprises scenarios where many heterogeneous and dynamic entities must interact to provide services (e.g., sensors, mobile devices and information systems in smart city scenarios). The dynamic conditions under which FI applications must execute call for self-adaptive software to cope with unforeseeable changes in the application environment. Models@run.time is a promising model-driven approach that supports the runtime adaptation of distributed, heterogeneous systems. Yet frameworks that accommodate this paradigm have limited support to address security concerns, hindering their usage in real scenarios. We address this challenge by enhancing models@run.time with the concepts of trust and reputation. Trust improves decision-making processes under risk and uncertainty and constitutes a distributed and flexible mechanism that does not entail heavyweight administration. This chapter introduces a trust and reputation framework that is integrated into a distributed component model that implements the models@run.time paradigm, thus allowing software components to include trust in their reasoning process. The framework is illustrated in a smart grid scenario.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Ruben Rios, Javier Lopez, Jorge Cuellar
Location Privacy in WSNs: Solutions, Challenges, and Future Trends
In: Foundations of Security Analysis and Design VII, vol. 8604, pp. 244-282, Springer, 2014, ISSN: 0302-9743.
@incollection{ruben2014a,
title = {Location Privacy in WSNs: Solutions, Challenges, and Future Trends},
author = {Ruben Rios and Javier Lopez and Jorge Cuellar},
url = {/wp-content/papers/ruben2014a.pdf},
doi = {10.1007/978-3-319-10082-1_9},
issn = {0302-9743},
year = {2014},
date = {2014-01-01},
urldate = {2014-01-01},
booktitle = {Foundations of Security Analysis and Design VII},
volume = {8604},
pages = {244-282},
publisher = {Springer},
organization = {Springer},
series = {LNCS},
abstract = {Privacy preservation is gaining popularity in Wireless Sensor Network (WSNs) due to its adoption in everyday scenarios. There are a number of research papers in this area many of which concentrate on the location privacy problem. In this paper we review and categorise these solutions based on the information available to the adversary and his capabilities. But first we analyse whether traditional anonymous communication systems conform to the original requirements of location privacy in sensor networks. Finally, we present and discuss a number of challenges and future trends that demand further attention from the research community.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Cristina Alcaraz, Gerardo Fernandez, Fernando Carvajal
Security Aspects of SCADA and DCS Environments
In: Javier Lopez, Stephen Wolthusen, Roberto Setola (Ed.): Critical Infrastructure Protection: Information Infrastructure Models, Analysis, and Defense, vol. 7130, pp. 120-149, Springer-Verlag, Heidelberger (Berlin, Alemania), 2012, ISSN: 0302-9743.
@incollection{BC2011Alcaraz,
title = {Security Aspects of SCADA and DCS Environments},
author = {Cristina Alcaraz and Gerardo Fernandez and Fernando Carvajal},
editor = {Javier Lopez and Stephen Wolthusen and Roberto Setola},
url = {/wp-content/papers/BC2011Alcaraz.pdf},
issn = {0302-9743},
year = {2012},
date = {2012-09-01},
urldate = {2012-09-01},
booktitle = {Critical Infrastructure Protection: Information Infrastructure Models, Analysis, and Defense},
volume = {7130},
pages = {120-149},
publisher = {Springer-Verlag},
address = {Heidelberger (Berlin, Alemania)},
organization = {Springer-Verlag},
series = {Advances in Critical Infrastructure Protection: Information Infrastructure Models, Analysis, and Defense. LNCS 7130.},
abstract = {SCADA Systems can be seen as a fundamental component in Critical Infrastructures, having an impact in the overall performance of other Critical Infrastructures interconnected. Currently, these systems include in their network designs different types of Information and Communication Technology systems (such as the Internet and wireless technologies), not only to modernize operational processes but also to ensure automation and real-time control. Nonetheless, the use of these new technologies will bring new security challenges, which will have a significant impact on both the business process and home users. Therefore, the main purpose of this Chapter is to address these issues and to analyze the interdependencies of Process Control Systems with ICT systems, to discuss some security aspects and to offer some possible solutions and recommendations.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Remi Bars, Jorge Gomez, Mohamed Mahdi, Cristina Alcaraz, Rodrigo Roman
Digital Home Networking: Standards
In: Romain Carbou, Ernesto Exposito, Rodrigo Roman, Michel Diaz (Ed.): Digital Home Networking, vol. 7130, pp. 60-96, John Wiley & Sons Inc., Reino Unido, 2011, ISSN: 978-1-84821-321-0.
@incollection{Alcaraz2011_ChapterBook,
title = {Digital Home Networking: Standards},
author = {Remi Bars and Jorge Gomez and Mohamed Mahdi and Cristina Alcaraz and Rodrigo Roman},
editor = {Romain Carbou and Ernesto Exposito and Rodrigo Roman and Michel Diaz},
issn = {978-1-84821-321-0},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
booktitle = {Digital Home Networking},
volume = {7130},
pages = {60-96},
publisher = {John Wiley \& Sons Inc.},
address = {Reino Unido},
organization = {John Wiley \& Sons Inc.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Pablo Najera, Ana Nieto
Network Technologies
In: Romain Carbou, Ernesto Exposito, Rodrigo Roman (Ed.): Digital Home Networking, pp. 17 – 58, Wiley-ISTE, 2011, ISBN: 978-1848213210.
@incollection{Najera_DHNChapter,
title = {Network Technologies},
author = {Pablo Najera and Ana Nieto},
editor = {Romain Carbou and Ernesto Exposito and Rodrigo Roman},
isbn = {978-1848213210},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
booktitle = {Digital Home Networking},
pages = {17 - 58},
publisher = {Wiley-ISTE},
organization = {Wiley-ISTE},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Francisco Moyano, Rodrigo Roman, Anas Abou El Kalam, Marc Lacoste, Mohamed Maachaoui
Security
In: Romain Carbou, Michel Diaz, Ernesto Exposito, Rodrigo Roman (Ed.): Digital Home Networking, pp. 139-202, 2011, ISSN: 9781848213210.
@incollection{Moyano_DHNChapter,
title = {Security},
author = {Francisco Moyano and Rodrigo Roman and Anas Abou El Kalam and Marc Lacoste and Mohamed Maachaoui},
editor = {Romain Carbou and Michel Diaz and Ernesto Exposito and Rodrigo Roman},
issn = {9781848213210},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
booktitle = {Digital Home Networking},
pages = {139-202},
chapter = {Security},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
David G. Rosado, Eduardo Fernandez-Medina, Javier Lopez
Security in the Developments Process of Mobile Grid Systems
In: Advances in Grid Computing, pp. 173-198, Intech, 2011.
BibTeX | Links:
@incollection{1626,
title = {Security in the Developments Process of Mobile Grid Systems},
author = {David G. Rosado and Eduardo Fernandez-Medina and Javier Lopez},
url = {/wp-content/papers/1626.pdf},
year = {2011},
date = {2011-01-01},
urldate = {2011-01-01},
booktitle = {Advances in Grid Computing},
pages = {173-198},
publisher = {Intech},
edition = {Zoran Constantinescu},
organization = {Intech},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Rodrigo Roman, Carmen Fernandez-Gago, Javier Lopez, Hsiao-Hwa Chen
Trust and Reputation Systems for Wireless Sensor Networks
In: Stefanos Gritzalis, Tom Karygiannis, Charalabos Skianis (Ed.): Security and Privacy in Mobile and Wireless Networking, pp. 105-128, Troubador Publishing Ltd, 2009, ISBN: 978-1905886-906.
@incollection{Roman2009b,
title = {Trust and Reputation Systems for Wireless Sensor Networks},
author = {Rodrigo Roman and Carmen Fernandez-Gago and Javier Lopez and Hsiao-Hwa Chen},
editor = {Stefanos Gritzalis and Tom Karygiannis and Charalabos Skianis},
url = {/wp-content/papers/Roman2009b.pdf},
isbn = {978-1905886-906},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
booktitle = {Security and Privacy in Mobile and Wireless Networking},
pages = {105-128},
publisher = {Troubador Publishing Ltd},
organization = {Troubador Publishing Ltd},
abstract = {The concept of trust has become very relevant in the late years as a consequence of the growth of fields such as internet transactions or electronic commerce. In general, trust has become of paramount importance for any kind of distributed networks, such as wireless sensor networks (WSN in the following). In this chapter of the book, we try to give a general overview of the state of the art on trust management systems for WSN and also try to identify the main features of the architectures of these trust management systems.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Rodrigo Roman, Cristina Alcaraz, Nicolas Sklavos
On the Hardware Implementation Efficiency of Cryptographic Primitives
In: Javier Lopez, Jianying Zhou (Ed.): Wireless Sensor Network Security, IOS Press, 2008, ISBN: 978-1-58603-813-7.
@incollection{Roman2008,
title = {On the Hardware Implementation Efficiency of Cryptographic Primitives},
author = {Rodrigo Roman and Cristina Alcaraz and Nicolas Sklavos},
editor = {Javier Lopez and Jianying Zhou},
url = {/wp-content/papers/Roman2008.pdf},
isbn = {978-1-58603-813-7},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
booktitle = {Wireless Sensor Network Security},
publisher = {IOS Press},
organization = {IOS Press},
abstract = {Security has been proven a crucial factor in the provision of data services and especially in the computer-related environments. While wired and wireless networks come to all sectors of everyday life, security tries to satisfy the growing needs for confidentiality, integrity and non-repudiation. There are many instances of security primitives and each one of them has different requirements in terms of processing power, word size, etc. Therefore, it is important to review the functionality of the less resource-demanding encryption algorithms in order to analyze their theoretical suitability to the existent sensor node hardware. Still, the constraints inherent to the sensor nodes advise against the total dependence on software-based implementations, even more in the case of expensive primitives.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Pablo Najera, Javier Lopez
RFID: Technological Issues and Privacy Concerns
In: Alessandro Acquisti, Stefanos Gritzalis, Costas Lambrinoudakis, Sabrina De Capitani Vimercati (Ed.): Digital Privacy: Theory, Technologies, and Practices, pp. 285-306, Auerbach Publications, 2007, ISBN: 1420052179.
BibTeX | Links:
@incollection{Najera2007,
title = {RFID: Technological Issues and Privacy Concerns},
author = {Pablo Najera and Javier Lopez},
editor = {Alessandro Acquisti and Stefanos Gritzalis and Costas Lambrinoudakis and Sabrina De Capitani Vimercati},
url = {/wp-content/papers/Najera2007.pdf},
isbn = {1420052179},
year = {2007},
date = {2007-12-01},
urldate = {2007-12-01},
booktitle = {Digital Privacy: Theory, Technologies, and Practices},
pages = {285-306},
publisher = {Auerbach Publications},
organization = {Auerbach Publications},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Jose L. Vivas, Jose A. Montenegro, Javier Lopez
Grid Security Architecture: Requirements, Fundamentals, Standards and Models
In: Yang Xiao (Ed.): Security in Distributed, Grid, Mobile, and Pervasive Computing, pp. 255-288, Auerbach Publications, 2007, ISBN: 9780849379215.
BibTeX | Links:
@incollection{vivas2007,
title = {Grid Security Architecture: Requirements, Fundamentals, Standards and Models},
author = {Jose L. Vivas and Jose A. Montenegro and Javier Lopez},
editor = {Yang Xiao},
url = {/wp-content/papers/vivas2007.pdf},
isbn = {9780849379215},
year = {2007},
date = {2007-04-01},
urldate = {2007-04-01},
booktitle = {Security in Distributed, Grid, Mobile, and Pervasive Computing},
pages = {255-288},
publisher = {Auerbach Publications},
organization = {Auerbach Publications},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Javier Lopez, Cristina Alcaraz, Rodrigo Roman
On the Protection and Technologies of Critical Information Infrastructures.
In: On Foundations of Security Analysis and Design IV, FOSAD 2006/2007, Springer, vol. 4677, pp. 160-182, 2007, ISSN: 0302-9743, (10.1007/978-3-540-74810-6_6).
@incollection{Lopez2007,
title = {On the Protection and Technologies of Critical Information Infrastructures.},
author = {Javier Lopez and Cristina Alcaraz and Rodrigo Roman},
url = {/wp-content/papers/Lopez2007.pdf},
doi = {10.1007/978-3-540-74810-6_6},
issn = {0302-9743},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {On Foundations of Security Analysis and Design IV, FOSAD 2006/2007, Springer},
volume = {4677},
pages = {160-182},
series = {LNCS},
abstract = {Critical Infrastructures are complex and highly interconnected systems that are crucial for the well-being of the society. Any type of failure can cause significant damage, affecting one or more sectors due to their inherent interdependency. Not only the infrastructures are critical, but also the information infrastructures that manage, control and supervise them. Due to the seriousness of the consequences, the protection of these critical (information) infrastructures must have the highest priority. It is the purpose of this book chapter to review and discuss about these infrastructures, to explain their elements, and to highlight their research and development issues. This chapter will also discuss the role of Wireless Sensor Network (WSN) technology in the protection of these infrastructures.},
note = {10.1007/978-3-540-74810-6_6},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}

Wenjuan Li, Liqun Chen, Javier Lopez (Ed.)
Emerging Information Security and Applications
2025, ISBN: 978-3-031-80418-2.
@proceedings{Li2025,
title = {Emerging Information Security and Applications},
editor = {Wenjuan Li, Liqun Chen, Javier Lopez},
doi = {https://doi.org/10.1007/978-3-031-80419-9},
isbn = {978-3-031-80418-2},
year = {2025},
date = {2025-01-18},
urldate = {2025-01-18},
abstract = {This book constitutes the refereed proceedings of the 5th International Conference on EISA--Emerging Information Security and Applications, EISA 2024, held in Changzhou, China, during October 18\textendash19, 2024.
The 15 full papers and 3 short papers included in this book were carefully reviewed and selected from 52 submissions. The topics covered adversarial techniques, intrusions that may threaten the security of various assets, including information and applications, have become more complex.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
The 15 full papers and 3 short papers included in this book were carefully reviewed and selected from 52 submissions. The topics covered adversarial techniques, intrusions that may threaten the security of various assets, including information and applications, have become more complex.
Ruben Rios, Fabio Martinelli
20th International Workshop on Security and Trust Management (STM 2024)
2024, ISBN: 978-3-031-76370-0.
BibTeX | Links:
@proceedings{Rios2024b,
title = {20th International Workshop on Security and Trust Management (STM 2024)},
author = {Ruben Rios and Fabio Martinelli},
editor = {This book constitutes the refereed proceedings of the 20th International Workshop on Security and Trust Management (ERCIM STM 2024), held in Bydgoszcz, Poland, during September 19\textendash20, 2024 and co-located with ESORICS 2024 conference.},
doi = {https://doi.org/10.1007/978-3-031-76371-7},
isbn = {978-3-031-76370-0},
year = {2024},
date = {2024-09-19},
urldate = {2024-09-19},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Ruben Rios, Joachim Posegga
19th International Workshop on Security and Trust Management (STM 2023)
Springer Cham, vol. 14336, 2023, ISBN: 978-3-031-47197-1.
@proceedings{stm2023,
title = {19th International Workshop on Security and Trust Management (STM 2023)},
author = {Ruben Rios and Joachim Posegga},
doi = {10.1007/978-3-031-47198-8},
isbn = {978-3-031-47197-1},
year = {2023},
date = {2023-11-03},
urldate = {2023-11-03},
booktitle = {Security and Trust Management},
volume = {14336},
issue = {LNCS 14336},
publisher = {Springer Cham},
series = {Lecture Notes in Computer Science (LNCS)},
abstract = {This book constitutes the proceedings of the 19th International Workshop on Security and Trust Management, STM 2023, co-located with the 28th European Symposium on Research in Computer Security, ESORICS 2023, held in The Hague, The Netherlands, during September 28th, 2023.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Tim Muller, Carmen Fernandez-Gago, Davide Ceolin, Ehud Gudes, Nurit Gal-Oz (Ed.)
14th IFIP WG11.11 on Trust Management (IFIPTM 2023)
2023, ISBN: 978-3-031-76716-6.
@proceedings{Muller2023,
title = {14th IFIP WG11.11 on Trust Management (IFIPTM 2023)},
editor = {Tim Muller, Carmen Fernandez-Gago, Davide Ceolin, Ehud Gudes, Nurit Gal-Oz},
isbn = {978-3-031-76716-6},
year = {2023},
date = {2023-10-18},
urldate = {2023-10-18},
abstract = {This book constitutes the refereed post-conference proceedings of the 14th IFIP WG 11.11 International Conference on Trust Management, IFIPTM 2023, held in Amsterdam, The Netherlands, during October 18\textendash20, 2023.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Rodrigo Roman, Mujeeb Ahmed (Ed.)
9th ACM Cyber-Physical System Security Workshop (CPSS 2023)
ACM, Melbourne, Australia, 2023, ISBN: 979-8-4007-0090-3.
BibTeX | Links:
@proceedings{cpss23,
title = {9th ACM Cyber-Physical System Security Workshop (CPSS 2023)},
editor = {Rodrigo Roman and Mujeeb Ahmed},
doi = {10.1145/3592538},
isbn = {979-8-4007-0090-3},
year = {2023},
date = {2023-07-19},
urldate = {2023-07-19},
publisher = {ACM},
address = {Melbourne, Australia},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Xingliang Yuan, Guangdong Bai, Cristina Alcaraz, Suryadipta Majumdar (Ed.)
16th International Conference on Network and System Security (NSS 2022)
2022, ISBN: 978-3-031-23019-6.
@proceedings{Yuan2022,
title = {16th International Conference on Network and System Security (NSS 2022)},
editor = {Xingliang Yuan, Guangdong Bai, Cristina Alcaraz, Suryadipta Majumdar},
doi = {10.1007/978-3-031-23020-2},
isbn = {978-3-031-23019-6},
year = {2022},
date = {2022-12-09},
urldate = {2022-12-09},
abstract = {This book constitutes the refereed proceedings of the 16th International Conference on Network and System Security, NSS 2022, held in Denarau Island, Fiji, on December 9-12, 2022.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Earlence Fernandes, Cristina Alcaraz
CPSIoTSec ’22: 4th Workshop on CPS & IoT Security and Privacy
2022, ISBN: 978-1-4503-9450-5.
@proceedings{Fernandes2022b,
title = {CPSIoTSec '22: 4th Workshop on CPS \& IoT Security and Privacy},
author = {Earlence Fernandes and Cristina Alcaraz},
doi = {10.1145/3548606.3563360},
isbn = {978-1-4503-9450-5},
year = {2022},
date = {2022-11-08},
urldate = {2022-11-08},
abstract = {Proceedings of the 2022 ACM SIGSAC Conference on Computer and Communications Security, Pages 3533 - 3534.
The complete CPSIoTSec'22 workshop proceedings are available at: https://dl.acm.org/doi/proceedings/10.1145/3560826},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
The complete CPSIoTSec’22 workshop proceedings are available at: https://dl.acm.org/doi/proceedings/10.1145/3560826
Jianying Zhou, Sridhar Adepu, Cristina Alcaraz, Lejla Batina, Emiliano Casalicchio, Sudipta Chattopadhyay, Chenglu Jin, Jingqiang Lin, Eleonora Losiouk, Suryadipta Majumdar, Weizhi Meng, Stjepan Picek, Jun Shao, Chunhua Su, Cong Wang, Yury Zhauniarovich, Saman Zonouz (Ed.)
4th Workshop on Artificial Intelligence and Industrial IoT Security (AIoTS 2022) – ACNS: International Conference on Applied Cryptography and Network Security
2022, ISBN: 978-3-031-16814-7.
@proceedings{Zhou2022,
title = {4th Workshop on Artificial Intelligence and Industrial IoT Security (AIoTS 2022) - ACNS: International Conference on Applied Cryptography and Network Security},
editor = {Jianying Zhou, Sridhar Adepu, Cristina Alcaraz, Lejla Batina, Emiliano Casalicchio, Sudipta Chattopadhyay, Chenglu Jin, Jingqiang Lin, Eleonora Losiouk, Suryadipta Majumdar, Weizhi Meng, Stjepan Picek, Jun Shao, Chunhua Su, Cong Wang, Yury Zhauniarovich and Saman Zonouz},
doi = {10.1007/978-3-031-16815-4},
isbn = {978-3-031-16814-7},
year = {2022},
date = {2022-09-22},
urldate = {2022-09-22},
abstract = {This book constitutes the proceedings of the satellite workshops held around the 20th International Conference on Applied Cryptography and Network Security, ACNS 2022, held in Rome, Italy, in June 2022. Due to the Corona pandemic the workshop was held as a virtual event. },
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Cristina Alcaraz, Liqun Chen, Shujun Li, Pierangela Samarati (Ed.)
24th International Conference on Information and Communications Security (ICICS 2022)
2022, ISBN: 978-3-031-15776-9.
@proceedings{Alcaraz2022,
title = {24th International Conference on Information and Communications Security (ICICS 2022)},
editor = {Cristina Alcaraz, Liqun Chen, Shujun Li, Pierangela Samarati},
doi = {10.1007/978-3-031-15777-6},
isbn = {978-3-031-15776-9},
year = {2022},
date = {2022-08-24},
urldate = {2022-08-24},
abstract = {This LNCS 13407 constitutes the refereed proceedings of the 24th International Conference on Information and Communications Security, ICICS 2022, held in Canterbury, UK,, in September 2022.
The papers are organized around the following topics: Cryptography, Authentication, Privacy and Anonymity, Attacks and Vulnerability Analysis, Artificial Intelligence for Detection, and Network Security and Forensics.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
The papers are organized around the following topics: Cryptography, Authentication, Privacy and Anonymity, Attacks and Vulnerability Analysis, Artificial Intelligence for Detection, and Network Security and Forensics.
Rodrigo Roman, Jianying Zhou (Ed.)
17th International Workshop on Security and Trust Management (STM 2021)
Springer Cham, vol. 13075, 2021, ISBN: 978-3-030-91859-0.
@proceedings{stm2021,
title = {17th International Workshop on Security and Trust Management (STM 2021)},
editor = {Rodrigo Roman and Jianying Zhou},
doi = {10.1007/978-3-030-91859-0},
isbn = {978-3-030-91859-0},
year = {2021},
date = {2021-12-03},
urldate = {2021-12-03},
volume = {13075},
publisher = {Springer Cham},
series = {Lecture Notes in Computer Science (LNCS)},
abstract = {This book constitutes the proceedings of the 17th International Workshop on Security and Trust Management, STM 2021, co-located with the 26th European Symposium on Research in Computer Security, ESORICS 2021. The conference was planned to take place in Darmstadt, Germany. It was held online on October 8, 2021, due to the COVID-19 pandemic.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Michail Maniatakos, Cristina Alcaraz (Ed.)
2nd Workshop on CPS&IoT Security and Privacy, 2021
2021, ISBN: 978-1-4503-8487-2.
@proceedings{Maniatakos2021b,
title = {2nd Workshop on CPS\&IoT Security and Privacy, 2021},
editor = {Michail Maniatakos and Cristina Alcaraz},
url = {https://dl.acm.org/doi/10.1145/3499434},
doi = {10.1145/3499434},
isbn = {978-1-4503-8487-2},
year = {2021},
date = {2021-11-15},
urldate = {2021-11-15},
abstract = {The call for papers attracted submissions from different parts of the world (Asia, Canada, Europe, Australia, United Kingdom, South America, and the United States). The program committee reviewed 26 technical papers and accepted 3 as Full Papers (12 pages) and 5 as Short Papers (6 pages).},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Manuel A. Serrano, Eduardo Fernández-Medina Cristina Alcaraz, Noemí de Castro, Guillermo Calvo
VI Jornadas Nacionales de Investigación en Ciberseguridad (JNIC 2021)
2021, ISBN: 978-84-9044-463-4.
BibTeX | Links:
@proceedings{Serrano2021,
title = {VI Jornadas Nacionales de Investigaci\'{o}n en Ciberseguridad (JNIC 2021)},
author = {Manuel A. Serrano, Eduardo Fern\'{a}ndez-Medina Cristina Alcaraz, Noem\'{i} de Castro, Guillermo Calvo},
doi = {10.18239/jornadas_2021.34.00},
isbn = {978-84-9044-463-4},
year = {2021},
date = {2021-06-09},
urldate = {2021-06-09},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Sokratis Katsikas, Cristina Alcaraz
Cyber-Physical System Security Workshop (CPSS 2020)
2020, ISBN: 978-1-4503-7608-2.
@proceedings{Katsikas2020,
title = {Cyber-Physical System Security Workshop (CPSS 2020)},
author = {Sokratis Katsikas, Cristina Alcaraz},
doi = {10.1145/3428310},
isbn = {978-1-4503-7608-2},
year = {2020},
date = {2020-10-06},
urldate = {2020-10-06},
abstract = {ASIA CCS '20: The 15th ACM Asia Conference on Computer and Communications Security
Taipei Taiwan, 6 October 2020},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Taipei Taiwan, 6 October 2020
Sokratis K. Katsikas, Cristina Alcaraz
14th International Workshop on Security and Trust Management (STM 2018)
Springer International Publishing, Springer Nature Switzerland, vol. 11091, 2018, ISSN: 1611-3349.
BibTeX | Links:
@proceedings{alcaraz2018a_cp,
title = {14th International Workshop on Security and Trust Management (STM 2018)},
author = {Sokratis K. Katsikas and Cristina Alcaraz},
url = {https://link.springer.com/book/10.1007%2F978-3-030-01141-3$#$about},
doi = {10.1007/978-3-030-01141-3},
issn = {1611-3349},
year = {2018},
date = {2018-09-01},
urldate = {2018-09-01},
journal = {International Workshop on Security and Trust Management},
volume = {11091},
publisher = {Springer International Publishing},
address = {Springer Nature Switzerland},
edition = {LNCS},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Javier Lopez, Jianying Zhou, Miguel Soriano (Ed.)
23rd European Symposium on Research In Computer (ESORICS 2018)
2018, ISBN: 978-3-319-99072-9.
@proceedings{Lopez2018,
title = {23rd European Symposium on Research In Computer (ESORICS 2018)},
editor = {Javier Lopez and Jianying Zhou and Miguel Soriano},
doi = {10.1007/978-3-319-99073-6},
isbn = {978-3-319-99072-9},
year = {2018},
date = {2018-08-12},
urldate = {2018-08-12},
abstract = {The two-volume set, LNCS 11098 and LNCS 11099 constitutes the refereed proceedings of the 23nd European Symposium on Research in Computer Security, ESORICS 2018, held in Barcelona, Spain, in September 2018.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Joaquin Garcia-Alfaro, Jordi Herrera-Joancomarti, Giovanni Livraga, Ruben Rios
13th International Workshop on Data Privacy Management (DPM 2018)
Springer International Publishing, Barcelona, Spain, vol. 11025, 2018, ISBN: 978-3-030-00305-0.
@proceedings{rios2018dpm,
title = {13th International Workshop on Data Privacy Management (DPM 2018)},
author = {Joaquin Garcia-Alfaro and Jordi Herrera-Joancomarti and Giovanni Livraga and Ruben Rios},
doi = {10.1007/978-3-030-00305-0},
isbn = {978-3-030-00305-0},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
volume = {11025},
publisher = {Springer International Publishing},
address = {Barcelona, Spain},
edition = {LNCS},
abstract = {ESORICS 2018 International Workshops, DPM 2018 and CBT 2018, Barcelona, Spain, September 6-7, 2018, Proceedings},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Javier Lopez, Indrajit Ray, Bruno Crispo (Ed.)
Risks and Security of Internet and Systems. 9th International Conference, CRiSIS 2014, Trento, Italy, August 27-29, 2014, Revised Selected Papers
2015, ISBN: 978-3-319-17126-5.
@proceedings{Lopez2015,
title = {Risks and Security of Internet and Systems. 9th International Conference, CRiSIS 2014, Trento, Italy, August 27-29, 2014, Revised Selected Papers},
editor = {Javier Lopez, Indrajit Ray, Bruno Crispo},
doi = {https://doi.org/10.1007/978-3-319-17127-2},
isbn = {978-3-319-17126-5},
year = {2015},
date = {2015-05-01},
urldate = {2015-05-01},
abstract = {This book constitutes the thoroughly refereed post- conference proceedings of the Ninth International Conference on Risks and Security of Internet Systems, CRiSIS 2014, held in Trento, Italy, in August 2014. The 13 full papers and 6 short papers presented were selected from 48 submissions. They explore risks and security issues in Internet applications, networks and systems covering topics such as trust, security risks and threats, intrusion detection and prevention, access control and security modeling.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Mónica Aguilar-Igartua, Carolina Tripp Barba, Cristina Alcaraz
12th ACM International Symposium on Performance Evaluation of Wireless Ad Hoc (PE-WASUM 2015)
ACM, Cancun, Mexico, 2015, ISBN: 978-1-4503-3759-5.
BibTeX | Links:
@proceedings{1591,
title = {12th ACM International Symposium on Performance Evaluation of Wireless Ad Hoc (PE-WASUM 2015)},
author = {M\'{o}nica Aguilar-Igartua and Carolina Tripp Barba and Cristina Alcaraz},
url = {http://dblp2.uni-trier.de/db/conf/pe-wasun/pe-wasun2015.html},
doi = {10.1145/2810379},
isbn = {978-1-4503-3759-5},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {12th ACM Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, \& Ubiquitous Networks, PE-WASUN 2015},
publisher = {ACM},
address = {Cancun, Mexico},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Massimo Felici, Carmen Fernández-Gago
1st Summer School on Accountability and Security in the Cloud (A4CLOUD 2014)
2014, ISBN: 978-3-319-17198-2.
@proceedings{Felici2014,
title = {1st Summer School on Accountability and Security in the Cloud (A4CLOUD 2014)},
author = {Massimo Felici, Carmen Fern\'{a}ndez-Gago},
doi = {10.1007/978-3-319-17199-9},
isbn = {978-3-319-17198-2},
year = {2014},
date = {2014-06-02},
urldate = {2014-06-02},
abstract = {The 1st A4Cloud Summer School has been one of the first events in the area of accountability and security in the cloud. It was organized by the EU-funded A4Cloud project, in collaboration with the European projects CIRRUS, Coco Cloud, CUMULUS, and SPECS. Cloud computing is a key technology that is being adopted progressively by companies and users across different application domains and industries. Yet, there are emerging issues such as security, privacy, and data protection.},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Sokratis K. Katsikas, Isaac Agudo (Ed.)
10th European Workshop on Public Key Infrastructures, Services and Applications (EuroPKI 2013)
Springer, vol. 8341, 2013, ISBN: 978-3-642-53996-1.
BibTeX | Links:
@proceedings{Katsikas2013,
title = {10th European Workshop on Public Key Infrastructures, Services and Applications (EuroPKI 2013)},
editor = {Sokratis K. Katsikas and Isaac Agudo},
doi = {10.1007/978-3-642-53997-8},
isbn = {978-3-642-53996-1},
year = {2013},
date = {2013-09-12},
urldate = {2014-01-01},
journal = {10th European Workshop on Public Key Infrastructures, Services and Applications},
volume = {8341},
publisher = {Springer},
edition = {LNCS},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Steven Furnell, Costas Lambrinoudakis, Javier Lopez (Ed.)
10th International Conference on Trust, Privacy and Security in Digital Business (TrustBus 2013)
Springer, Prague, Czech Republic, vol. LNCS 8058, 2013, ISBN: 978-3-642-40342-2.
@proceedings{1832,
title = {10th International Conference on Trust, Privacy and Security in Digital Business (TrustBus 2013)},
editor = {Steven Furnell and Costas Lambrinoudakis and Javier Lopez},
isbn = {978-3-642-40342-2},
year = {2013},
date = {2013-08-01},
urldate = {2013-08-01},
journal = {10th International Conference on Trust, Privacy and Security in Digital Business (TRUSTBUS 2013)},
volume = {LNCS 8058},
publisher = {Springer},
address = {Prague, Czech Republic},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Javier Lopez, Xinyi Huang, Ravi Sandhu (Ed.)
7th International Conference on Network and System Security (NSS 2013)
Springer, vol. LNCS, no. 7873, 2013, ISBN: 978-3-642-38631-2.
BibTeX | Links:
@proceedings{1792,
title = {7th International Conference on Network and System Security (NSS 2013)},
editor = {Javier Lopez and Xinyi Huang and Ravi Sandhu},
url = {http://www.springer.com/computer/security+and+cryptology/book/978-3-642-38630-5},
isbn = {978-3-642-38631-2},
year = {2013},
date = {2013-06-01},
urldate = {2013-06-01},
volume = {LNCS},
number = {7873},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Carmen Fernandez-Gago, Fabio Martinelli, Siani Pearson, Isaac Agudo (Ed.)
7th IFIP WG11.11 on Trust Management (IFIPTM 2013)
Springer, Malaga (Spain), vol. 401, 2013, ISBN: 978-3-642-38323-6.
@proceedings{ifiptm13,
title = {7th IFIP WG11.11 on Trust Management (IFIPTM 2013)},
editor = {Carmen Fernandez-Gago and Fabio Martinelli and Siani Pearson and Isaac Agudo},
isbn = {978-3-642-38323-6},
year = {2013},
date = {2013-06-01},
urldate = {2013-06-01},
volume = {401},
publisher = {Springer},
address = {Malaga (Spain)},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Bernhard M. Hämmerli, Nils Kalstad Svendsen, Javier Lopez (Ed.)
7th International Conference on Critical Information Infrastructures Security (CRITIS 2012)
Springer, Lillehammer (Norway), vol. LNCS 7722, 2013, ISBN: 978-3-642-41485-5.
BibTeX | Links:
@proceedings{1782,
title = {7th International Conference on Critical Information Infrastructures Security (CRITIS 2012)},
editor = {Bernhard M. H\"{a}mmerli and Nils Kalstad Svendsen and Javier Lopez},
url = {http://link.springer.com/book/10.1007%2F978-3-642-41485-5},
isbn = {978-3-642-41485-5},
year = {2013},
date = {2013-00-01},
urldate = {2013-00-01},
journal = {7th International Conference on Critical Information Infrastructures Security (CRITIS 2012)},
volume = {LNCS 7722},
publisher = {Springer},
address = {Lillehammer (Norway)},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Yang Xiang, Javier Lopez, C.-C. Jay Kuo, Wanlei Zhou (Ed.)
4th International Symposium on Cyberspace Safety and Security (CSS 2012)
Springer, Melbourne (Australia), vol. LNCS, 2012, ISSN: 978-3-642-35362-8.
@proceedings{1781,
title = {4th International Symposium on Cyberspace Safety and Security (CSS 2012)},
editor = {Yang Xiang and Javier Lopez and C.-C. Jay Kuo and Wanlei Zhou},
issn = {978-3-642-35362-8},
year = {2012},
date = {2012-12-01},
urldate = {2012-12-01},
journal = {4th International Symposium on Cyberspace Safety and Security (CSS 2012)},
volume = {LNCS},
publisher = {Springer},
address = {Melbourne (Australia)},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Catherine Meadows, Carmen Fernandez-Gago (Ed.)
7th International Workshop on Security and Trust Management (STM 2011)
Springer, Copenhaguen, Denmark, vol. 7170, 2012, ISBN: 978-3-642-29963-6.
@proceedings{stm11,
title = {7th International Workshop on Security and Trust Management (STM 2011)},
editor = {Catherine Meadows and Carmen Fernandez-Gago},
isbn = {978-3-642-29963-6},
year = {2012},
date = {2012-07-01},
urldate = {2012-07-01},
volume = {7170},
publisher = {Springer},
address = {Copenhaguen, Denmark},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Jorge Cuellar, Javier Lopez (Ed.)
3rd International ACMSigsoft Symposium on Architecting Critical Systems (ISARCS 2012)
ACM, Bertinoro (Italy), 2012.
@proceedings{1783,
title = {3rd International ACMSigsoft Symposium on Architecting Critical Systems (ISARCS 2012)},
editor = {Jorge Cuellar and Javier Lopez},
year = {2012},
date = {2012-06-01},
urldate = {2012-06-01},
journal = {3rd International ACMSigsoft Symposium on Architecting Critical Systems (ISARCS 2012)},
publisher = {ACM},
address = {Bertinoro (Italy)},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Javier Lopez, Gene Tsudik
9th International Conference on Applied Cryptography and Network Security (ACNS 2011)
Springer, vol. 6715, 2011.
@proceedings{1627,
title = {9th International Conference on Applied Cryptography and Network Security (ACNS 2011)},
author = {Javier Lopez and Gene Tsudik},
year = {2011},
date = {2011-08-01},
urldate = {2011-08-01},
volume = {6715},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Jorge Cuellar, Javier Lopez, Gilles Barthe, Alexander Pretschner (Ed.)
6th International Workshop on Security and Trust Management (STM 2010)
vol. 6710, 2010, ISSN: 978-3-642-22443-0.
@proceedings{1661,
title = {6th International Workshop on Security and Trust Management (STM 2010)},
editor = {Jorge Cuellar and Javier Lopez and Gilles Barthe and Alexander Pretschner},
issn = {978-3-642-22443-0},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {6th International Workshop, STM 2010, Athens, Greece, September 23-24, 2010. Proceedings},
volume = {6710},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Sokratis K. Katsikas, Javier Lopez, Miguel Soriano (Ed.)
7th International Conference on Trust, Privacy & Security in Digital Business (TrustBus 2010)
Springer, vol. 6264, 2010, ISBN: 978-3-642-15151-4.
BibTeX | Links:
@proceedings{trustbus2010_proc,
title = {7th International Conference on Trust, Privacy \& Security in Digital Business (TrustBus 2010)},
editor = {Sokratis K. Katsikas and Javier Lopez and Miguel Soriano},
doi = {10.1007/978-3-642-15152-1},
isbn = {978-3-642-15151-4},
year = {2010},
date = {2010-01-01},
urldate = {2010-01-01},
journal = {TrustBus},
volume = {6264},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Yang Xiang, Javier Lopez, Haining Wang, Wanlei Zhou (Ed.)
3rd International Conference on Network and Information Security (NSS 2009)
IEEE Computer Sociaty, Gold Coast, Australia, 2009, ISBN: 978-07695-3838-9.
BibTeX | Links:
@proceedings{1784,
title = {3rd International Conference on Network and Information Security (NSS 2009)},
editor = {Yang Xiang and Javier Lopez and Haining Wang and Wanlei Zhou},
doi = {10.1109/nss15221.2009},
isbn = {978-07695-3838-9},
year = {2009},
date = {2009-10-01},
urldate = {2009-10-01},
journal = {3rd International Conference on Network and System Security (NSS 2009)},
publisher = {IEEE Computer Sociaty},
address = {Gold Coast, Australia},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Dimitris Gritzalis, Javier Lopez (Ed.)
24th International Information Security Conference (IFIP-SEC 2009)
Springer, vol. 297, 2009, ISBN: 978-3-642-01243-3.
BibTeX | Links:
@proceedings{1604,
title = {24th International Information Security Conference (IFIP-SEC 2009)},
editor = {Dimitris Gritzalis and Javier Lopez},
doi = {10.1007/978-3-642-01244-0},
isbn = {978-3-642-01243-3},
year = {2009},
date = {2009-01-01},
urldate = {2009-01-01},
journal = {SEC},
volume = {297},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Sushil Jajodia, Javier Lopez (Ed.)
13th European Symposium on Research in Computer Security (ESORICS 2008)
Springer, vol. 5283, 2008, ISBN: 978-3-540-88312-8.
@proceedings{1605,
title = {13th European Symposium on Research in Computer Security (ESORICS 2008)},
editor = {Sushil Jajodia and Javier Lopez},
isbn = {978-3-540-88312-8},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
journal = {ESORICS},
volume = {5283},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Jose A. Onieva, Damien Sauveron, Serge Chaumette, Dieter Gollmann, Konstantinos Markantonakis (Ed.)
II Workshop in Information Security Theory and Practices (WISTP 2008)
Springer Verlag, Seville, Spain, vol. 5019, 2008, ISBN: 978-3-540-79965-8.
BibTeX | Links:
@proceedings{Onieva2008,
title = {II Workshop in Information Security Theory and Practices (WISTP 2008)},
editor = {Jose A. Onieva and Damien Sauveron and Serge Chaumette and Dieter Gollmann and Konstantinos Markantonakis},
doi = {10.1007/978-3-540-79966-5},
isbn = {978-3-540-79965-8},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
journal = {Workshop in Information Security Theory and Practices},
volume = {5019},
publisher = {Springer Verlag},
address = {Seville, Spain},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Joachim Biskup, Javier Lopez (Ed.)
12th European Symposium on Research in Computer (ESORICS 2007)
Springer, vol. 4734, 2007, ISBN: 978-3-540-74834-2.
@proceedings{1607,
title = {12th European Symposium on Research in Computer (ESORICS 2007)},
editor = {Joachim Biskup and Javier Lopez},
isbn = {978-3-540-74834-2},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {ESORICS},
volume = {4734},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Javier Lopez, Bernhard M. Hämmerli (Ed.)
2nd International Workshop on Critical Information Infrastructures Security (CRITIS 2007)
Springer, vol. 5141, 2007, ISBN: 978-3-540-89095-9.
BibTeX | Links:
@proceedings{1606,
title = {2nd International Workshop on Critical Information Infrastructures Security (CRITIS 2007)},
editor = {Javier Lopez and Bernhard M. H\"{a}mmerli},
doi = {10.1007/978-3-540-89173-4},
isbn = {978-3-540-89095-9},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {CRITIS},
volume = {5141},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Javier Lopez, Pierangela Samarati, Josep L. Ferrer-Gomila (Ed.)
4th European Workshop on Public Key Infrastructures (EuroPKI 2007)
Springer, vol. 4582, 2007, ISBN: 978-3-540-73407-9.
@proceedings{1609,
title = {4th European Workshop on Public Key Infrastructures (EuroPKI 2007)},
editor = {Javier Lopez and Pierangela Samarati and Josep L. Ferrer-Gomila},
isbn = {978-3-540-73407-9},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {EuroPKI},
volume = {4582},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Panagiotis Georgiadis, Javier Lopez, Stefanos Gritzalis, Giannis F. Marias (Ed.)
3rd International Workshop on Security, Privacy and Trust in Pervasive and Ubiquitous Computing (SecPerU 2007), 19 July 2007, Istanbul, Turkey
IEEE Press, 2007, ISBN: 978-07695-2563-2.
BibTeX | Links:
@proceedings{1608,
title = {3rd International Workshop on Security, Privacy and Trust in Pervasive and Ubiquitous Computing (SecPerU 2007), 19 July 2007, Istanbul, Turkey},
editor = {Panagiotis Georgiadis and Javier Lopez and Stefanos Gritzalis and Giannis F. Marias},
doi = {10.1109/IEEECONF13055.2007},
isbn = {978-07695-2563-2},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
journal = {SecPerU},
publisher = {IEEE Press},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Javier Lopez (Ed.)
1st International Workshop on Critical Information Infrastructure Security (CRITIS 2006)
Springer, vol. 4347, 2006, ISBN: 3-540-69083-2.
@proceedings{1610,
title = {1st International Workshop on Critical Information Infrastructure Security (CRITIS 2006)},
editor = {Javier Lopez},
isbn = {3-540-69083-2},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {CRITIS},
volume = {4347},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Sokratis K. Katsikas, Javier Lopez, Michael Backes, Stefanos Gritzalis, Bart Preneel (Ed.)
9th International Information Security Conference (ISC 2006)
Springer, vol. 4176, 2006, ISBN: 3-540-38341-7.
@proceedings{1611,
title = {9th International Information Security Conference (ISC 2006)},
editor = {Sokratis K. Katsikas and Javier Lopez and Michael Backes and Stefanos Gritzalis and Bart Preneel},
isbn = {3-540-38341-7},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {ISC},
volume = {4176},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Sihan Qing, Wenbo Mao, Javier Lopez, Guilin Wang (Ed.)
7th International Conference on Information as Communication Security (ICICS 2005)
Springer, vol. 3783, 2005, ISBN: 3-540-30934-9.
@proceedings{1612,
title = {7th International Conference on Information as Communication Security (ICICS 2005)},
editor = {Sihan Qing and Wenbo Mao and Javier Lopez and Guilin Wang},
isbn = {3-540-30934-9},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {ICICS},
volume = {3783},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Jianying Zhou, Javier Lopez, Robert H. Deng, Feng Bao (Ed.)
8th International Information Security Conference (ISC 2005)
Springer, vol. 3650, 2005, ISBN: 3-540-29001-X.
@proceedings{1613,
title = {8th International Information Security Conference (ISC 2005)},
editor = {Jianying Zhou and Javier Lopez and Robert H. Deng and Feng Bao},
isbn = {3-540-29001-X},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {ISC},
volume = {3650},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Sokratis K. Katsikas, Javier Lopez, Guenther Pernul (Ed.)
2nd International Conference on Trust, Privacy and Security in Digital Business (TrustBus 2005)
Springer, vol. 3592, 2005, ISBN: 3-540-28224-6.
@proceedings{1614,
title = {2nd International Conference on Trust, Privacy and Security in Digital Business (TrustBus 2005)},
editor = {Sokratis K. Katsikas and Javier Lopez and Guenther Pernul},
isbn = {3-540-28224-6},
year = {2005},
date = {2005-01-01},
urldate = {2005-01-01},
journal = {TrustBus},
volume = {3592},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Javier Lopez, Sihan Qing, Eiji Okamoto (Ed.)
6th International Conference on Information and Communications Security (ICICS 2004)
Springer, vol. 3269, 2004, ISBN: 3-540-23563-9.
@proceedings{1615,
title = {6th International Conference on Information and Communications Security (ICICS 2004)},
editor = {Javier Lopez and Sihan Qing and Eiji Okamoto},
isbn = {3-540-23563-9},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {ICICS},
volume = {3269},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Sokratis K. Katsikas, Stefanos Gritzalis, Javier Lopez (Ed.)
1st European PKI Workshop (EuroPKI 2004)
Springer, vol. 3093, 2004, ISBN: 3-540-22216-2.
@proceedings{1617,
title = {1st European PKI Workshop (EuroPKI 2004)},
editor = {Sokratis K. Katsikas and Stefanos Gritzalis and Javier Lopez},
isbn = {3-540-22216-2},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {EuroPKI},
volume = {3093},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}

Sokratis K. Katsikas, Javier Lopez, Guenther Pernul (Ed.)
1st International Conference on Trust and Privacy in Digital Business (TrustBus 2004)
Springer, vol. 3184, 2004, ISBN: 3-540-22919-1.
@proceedings{1616,
title = {1st International Conference on Trust and Privacy in Digital Business (TrustBus 2004)},
editor = {Sokratis K. Katsikas and Javier Lopez and Guenther Pernul},
isbn = {3-540-22919-1},
year = {2004},
date = {2004-01-01},
urldate = {2004-01-01},
journal = {TrustBus},
volume = {3184},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Miguel Soriano, Javier Lopez, Forne Jordi (Ed.)
2nd Spanish Symposium on Electronic Commerce (SEC 2003)
Fundacion Dintel, vol. 7, 2003, ISBN: 8493290203.
@proceedings{1618,
title = {2nd Spanish Symposium on Electronic Commerce (SEC 2003)},
editor = {Miguel Soriano and Javier Lopez and Forne Jordi},
isbn = {8493290203},
year = {2003},
date = {2003-01-01},
urldate = {2003-01-01},
journal = {SCE’03},
volume = {7},
publisher = {Fundacion Dintel},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}
Javier Lopez, J Pastor, Jose M. Troya (Ed.)
5th Spanish Conference on Cryptology and Information Security
1998, ISBN: 8484978206.
@proceedings{1619,
title = {5th Spanish Conference on Cryptology and Information Security},
editor = {Javier Lopez and J Pastor and Jose M. Troya},
isbn = {8484978206},
year = {1998},
date = {1998-01-01},
urldate = {1998-01-01},
journal = {RECSI},
keywords = {},
pubstate = {published},
tppubtype = {proceedings}
}